You might also like
- Teac MC DX10 Service ManualDocument26 pagesTeac MC DX10 Service ManualVaishakNo ratings yet
- Onkyo Service Manual 1Document129 pagesOnkyo Service Manual 1SergioJuniorNo ratings yet
- Service Manual RCI 6900F150 ENG PDFDocument41 pagesService Manual RCI 6900F150 ENG PDFRichardson Almeida0% (1)
- Gemini Sound X-2 Service ManualDocument24 pagesGemini Sound X-2 Service Manualbizzinifra5522No ratings yet
- Yorkville AM100 Service ManualDocument10 pagesYorkville AM100 Service Manualcaimanater100% (1)
- Hfe Kef Psw3500 Service enDocument30 pagesHfe Kef Psw3500 Service enTiromancino Tiromancino100% (1)
- Easy VibeDocument1 pageEasy VibepincopirolaNo ratings yet
- Ups Aros Sentinel XR 3300 6000 PDFDocument37 pagesUps Aros Sentinel XR 3300 6000 PDFVasile Bulibasa67% (3)
- SearchDocument9 pagesSearchMartin JimenezNo ratings yet
- Voyager VB777 MosfetDocument1 pageVoyager VB777 MosfetLuis CarlosNo ratings yet
- Service Manual Cobra 200GTL DX ENGDocument31 pagesService Manual Cobra 200GTL DX ENGBuzarin DanielNo ratings yet
- Metal Detector ReportDocument13 pagesMetal Detector ReportAnonymous ytZsBOVNo ratings yet
- DX 1227Document11 pagesDX 1227Marcos Daniel Muñoz ToledoNo ratings yet
- Simple Bass Treble Tone ControlDocument1 pageSimple Bass Treble Tone ControlsanapashokNo ratings yet
- CTK 4000Document26 pagesCTK 4000JorgeBaquéNo ratings yet
- Bassman Bass Preamp: Mod+layout Deadastronaut 2013Document1 pageBassman Bass Preamp: Mod+layout Deadastronaut 2013Jezz Mort0% (1)
- Sony HCD Rv222 Ver 1.1Document86 pagesSony HCD Rv222 Ver 1.1Carlos Raul100% (2)
- JVC Service Manual mxgt80 PDFDocument48 pagesJVC Service Manual mxgt80 PDFAlex GuerreroNo ratings yet
- HC 14000 MH 9400 SCHDocument1 pageHC 14000 MH 9400 SCHGustavo de Vargas DiasNo ratings yet
- Peavey PR15D Service ManualDocument12 pagesPeavey PR15D Service ManualMartín SayagoNo ratings yet
- PV T-Max 1Document9 pagesPV T-Max 1akkNo ratings yet
- ELECTROINDIA - 150 Watts Mono Amplifier Board DIY With 2sc5200, 2sa1943 & TDA7294 PDFDocument3 pagesELECTROINDIA - 150 Watts Mono Amplifier Board DIY With 2sc5200, 2sa1943 & TDA7294 PDFChornosDjajal100% (1)
- General Description: Multi-Mode Primary Side Regulation (PSR) CV/CC ControllerDocument11 pagesGeneral Description: Multi-Mode Primary Side Regulation (PSR) CV/CC ControllertoolsNo ratings yet
- Silicon PNP Power TransistorsDocument4 pagesSilicon PNP Power Transistorsjavier byronNo ratings yet
- Cobra Modification and Tuning ListDocument2 pagesCobra Modification and Tuning ListTodd HoferNo ratings yet
- MA5002VZ SM 130446-1amplificator ManualDocument140 pagesMA5002VZ SM 130446-1amplificator Manualtiganiada100% (1)
- STK433 070 eDocument11 pagesSTK433 070 evanuzalopeslopes1No ratings yet
- stk412 240Document1 pagestk412 240luisclaudio31No ratings yet
- Pioneer Sx-4, 5, 6, 7 SMDocument14 pagesPioneer Sx-4, 5, 6, 7 SMvali dNo ratings yet
- Active 3 Band Tone ControlDocument1 pageActive 3 Band Tone ControlAnonymous vKD3FG6RkNo ratings yet
- GTO Series: Service ManualDocument32 pagesGTO Series: Service ManualHardikNo ratings yet
- 2 Band Onboard PreampDocument7 pages2 Band Onboard PreampDanny RachmanNo ratings yet
- 4d4fe32593743 - SiA 208RDocument8 pages4d4fe32593743 - SiA 208RManoj VattavilaNo ratings yet
- Rca 29521 Chasis CTC184Document61 pagesRca 29521 Chasis CTC184Leopoldo UrquizaNo ratings yet
- Precision Monolithic Quad SPST CMOS Analog Switches V411: Features Benefits ApplicationsDocument7 pagesPrecision Monolithic Quad SPST CMOS Analog Switches V411: Features Benefits ApplicationsCesar MenesesNo ratings yet
- Ar7240 Ah1a PDFDocument1 pageAr7240 Ah1a PDFOscar Luis Quincoses Del ValleNo ratings yet
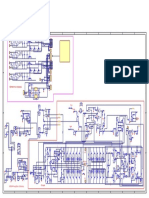
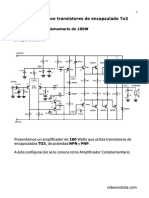
- Complementario 180w To3Document11 pagesComplementario 180w To3Horacio Sendrós100% (1)
- 8577835-Building An Electronic Signal TracerDocument12 pages8577835-Building An Electronic Signal TracerLyckholm Sam100% (1)
- Midas VeniceDocument46 pagesMidas Venicemirescualin100% (1)
- Class D Ucd Beta01 06.12Document1 pageClass D Ucd Beta01 06.12luizcpimentaNo ratings yet
- Od3 Schematic Carrillo Values Jan 2012Document4 pagesOd3 Schematic Carrillo Values Jan 2012Pablo Carrillo SanmartínNo ratings yet
- LCR-0202 Analog Linear CouplingDocument3 pagesLCR-0202 Analog Linear CouplingJaPan Life100% (1)
- CV3393BL G 20 CultraviewDocument15 pagesCV3393BL G 20 CultraviewSamuel Ulises Leon GonzalezNo ratings yet
- Simply Ph03-070808 Chassis Ph03Document4 pagesSimply Ph03-070808 Chassis Ph03Hector Arias100% (2)
- FORMPREDocument8 pagesFORMPREFouquetNo ratings yet
- Peavey XR680E Mixer AmplifierDocument7 pagesPeavey XR680E Mixer AmplifierRafael Tinajero Rafles100% (1)
- Inter M r150 r300 r500 Power Amplifier Service ManualDocument11 pagesInter M r150 r300 r500 Power Amplifier Service Manualn_hakimNo ratings yet
- M-1008K - 050712-2 TesterDocument20 pagesM-1008K - 050712-2 Testermaq67No ratings yet
- SMPS Half Bridge Compacta 2.0Document3 pagesSMPS Half Bridge Compacta 2.0ชาญณรงค์ สมพรไพลินNo ratings yet
- DV k584n SJDocument123 pagesDV k584n SJinformscribdNo ratings yet
- Cobra 148fgtl DX+ FetDocument5 pagesCobra 148fgtl DX+ Feteliud_buenoNo ratings yet
- Kit 49. Ultrasonic Movement Detector Ii: ComponentsDocument2 pagesKit 49. Ultrasonic Movement Detector Ii: Componentsbhavyasri14No ratings yet
- 125-Electronics Projects Vol 26Document6 pages125-Electronics Projects Vol 26Ye Min OoNo ratings yet
- REGENERATIVE SHORTWAVE RECEIVER - Circuit Diagram - Forum - SeekICDocument1 pageREGENERATIVE SHORTWAVE RECEIVER - Circuit Diagram - Forum - SeekICdaniNo ratings yet
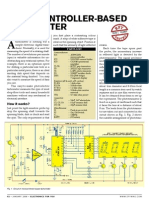
- Microcontroller-Based Tachometer: ConstructionDocument4 pagesMicrocontroller-Based Tachometer: Constructionjoniakom100% (1)
- SW Radio PDFDocument5 pagesSW Radio PDFAhmed BoubakerNo ratings yet
- HomeworkDocument7 pagesHomeworkDoutimiye Tonlagha EddieNo ratings yet
- Experimental CW QRP Transceiver: ANTENTOP-01 - 2006, # 008Document4 pagesExperimental CW QRP Transceiver: ANTENTOP-01 - 2006, # 008Al FrenchNo ratings yet
- Remote Control Fan RegulatorDocument42 pagesRemote Control Fan Regulatorshiningstar_abhi376567% (3)
- IR Remote ExtenderDocument5 pagesIR Remote ExtenderfaisalbceNo ratings yet
- K63 One-Chip Am Radio: Sensitivity Is The Ability To Pick Up Weak Signals WhileDocument2 pagesK63 One-Chip Am Radio: Sensitivity Is The Ability To Pick Up Weak Signals WhileJuan Manuel Hernandez B.No ratings yet
- Spice Mosfet Model IntroDocument50 pagesSpice Mosfet Model Intro高慶樺No ratings yet
- Tiny Predictive Fan Failure Detector: Features General DescriptionDocument14 pagesTiny Predictive Fan Failure Detector: Features General DescriptionAkoKhalediNo ratings yet
- 01 - Difference Between WCDMA and GSMDocument11 pages01 - Difference Between WCDMA and GSMAdil SumantriNo ratings yet
- NPN Silicon Epitaxial Planar Transistor: Absolute Maximum Ratings (T 25 C)Document2 pagesNPN Silicon Epitaxial Planar Transistor: Absolute Maximum Ratings (T 25 C)Luis Carlos OrtegaNo ratings yet
- Basic Laws of Electric Circuits: Nodal AnalysisDocument29 pagesBasic Laws of Electric Circuits: Nodal AnalysisLeila CheropNo ratings yet
- Votano 100Document26 pagesVotano 100buicongbinhNo ratings yet
- Computer Cooling MethodsDocument11 pagesComputer Cooling Methodssiva0182No ratings yet
- Nassif Alexandre Fall+2009Document201 pagesNassif Alexandre Fall+2009aramirezbenitesNo ratings yet
- History of ComputerDocument24 pagesHistory of ComputerraviNo ratings yet
- CSEC Physics Past Papers Jan 2017 Q5 Logic GatesDocument4 pagesCSEC Physics Past Papers Jan 2017 Q5 Logic GatesjoeNo ratings yet
- Manual Gateway DLMS-MODBUS Landis+Gyr RS485Document9 pagesManual Gateway DLMS-MODBUS Landis+Gyr RS485MARCOM SRLNo ratings yet
- Ham Radio Workbench-QRP Dummy Load-ManualDocument4 pagesHam Radio Workbench-QRP Dummy Load-ManualBenjamin Dover100% (1)
- Sensor Signal ConditioningDocument366 pagesSensor Signal Conditioningwagnalang1639100% (1)
- Microwave System DescriptionDocument16 pagesMicrowave System DescriptionNavi NaviNo ratings yet
- Conveyor Belt Motor Using Control Grafcet As Programming ToolDocument27 pagesConveyor Belt Motor Using Control Grafcet As Programming Toolcacung100% (3)
- DX79TO ProductGuide01 EnglishDocument86 pagesDX79TO ProductGuide01 EnglishqwarztNo ratings yet
- 50 Years of Piezoelectric Transformers. Trends in The TechnologyDocument12 pages50 Years of Piezoelectric Transformers. Trends in The TechnologyYYedow100% (1)
- T7 Datasheet Export 20150407Document115 pagesT7 Datasheet Export 20150407mehralsmenschNo ratings yet
- Computer QUIZDocument22 pagesComputer QUIZNayan KumarNo ratings yet
- Smart Cameras in Embedded SystemsDocument8 pagesSmart Cameras in Embedded SystemsVivekSonkerNo ratings yet
- Board Tester Series: Yascaxxx Data SheetDocument4 pagesBoard Tester Series: Yascaxxx Data SheetJORDAN ABEL SOSA VILLEGASNo ratings yet
- FP12xxC FP28xxC Installation EnglishDocument48 pagesFP12xxC FP28xxC Installation EnglishRemus BobeNo ratings yet
- Kerala University B.tech 2008 Scheme Syllabus For 1&2 SemDocument4 pagesKerala University B.tech 2008 Scheme Syllabus For 1&2 Semjoyasams100% (1)
- F510 Instruction ManualDocument438 pagesF510 Instruction ManualMitzi Coleene BuezaNo ratings yet
- Why Partner With TI in Blood Glucose Meters?Document3 pagesWhy Partner With TI in Blood Glucose Meters?userNo ratings yet
- Device Package Parts Description Qty: Flipmouse MainboardDocument4 pagesDevice Package Parts Description Qty: Flipmouse MainboardjlnederNo ratings yet
- Audison Forza Apf8.9bit-24v Tech-Sheet 2019Document1 pageAudison Forza Apf8.9bit-24v Tech-Sheet 2019Erwin HernandezNo ratings yet
- Esquema Elétrico LG H422 LG Volt - Manual de ServiçoDocument116 pagesEsquema Elétrico LG H422 LG Volt - Manual de ServiçoValmirSousaSilva33% (3)