You might also like
- Financial Planning 2nd Edition Mckeown Test BankDocument35 pagesFinancial Planning 2nd Edition Mckeown Test Bankbunkerlulleruc3s100% (26)
- Classic and Romantic German Aesthetics (Cambridge Texts in The History of Philosophy) - J.M. Bernstein, EdDocument357 pagesClassic and Romantic German Aesthetics (Cambridge Texts in The History of Philosophy) - J.M. Bernstein, Edmenaclavazq627180% (5)
- Suggested Chapters and Parts of A Feasibility StudyDocument4 pagesSuggested Chapters and Parts of A Feasibility StudyRofela Hrtlls75% (4)
- Convolutional CodesDocument83 pagesConvolutional CodesRashmi JamadagniNo ratings yet
- Wireless Access Systems Exercise Sheet 2: Coded OFDM Modem: Oals of The XerciseDocument6 pagesWireless Access Systems Exercise Sheet 2: Coded OFDM Modem: Oals of The XerciseRashed IslamNo ratings yet
- Convolutional Coding and Viterbi DecodingDocument30 pagesConvolutional Coding and Viterbi DecodingEmNo ratings yet
- Illuminating The Structure Code and Decoder Parallel Concatenated Recursive Systematic CodesDocument6 pagesIlluminating The Structure Code and Decoder Parallel Concatenated Recursive Systematic Codessinne4No ratings yet
- Design of Convolutional Encoder and Viterbi Decoder Using MATLABDocument6 pagesDesign of Convolutional Encoder and Viterbi Decoder Using MATLABThu NguyễnNo ratings yet
- Viterbi ImplementationDocument19 pagesViterbi Implementationgannoju423No ratings yet
- Convolutional CodeDocument15 pagesConvolutional CodeDhivya LakshmiNo ratings yet
- Implementation of A Turbo Encoder and Turbo Decoder On DSP Processor-TMS320C6713Document5 pagesImplementation of A Turbo Encoder and Turbo Decoder On DSP Processor-TMS320C6713IJERDNo ratings yet
- Gargi Sharma Viterbi Algorithm Term Paper EEL201Document4 pagesGargi Sharma Viterbi Algorithm Term Paper EEL201Gaurav NavalNo ratings yet
- Convolutional Code (II)Document115 pagesConvolutional Code (II)Atef Al-Kotafi Al-AbdiNo ratings yet
- S.72-3320 Advanced Digital Communication (4 CR) : Convolutional CodesDocument26 pagesS.72-3320 Advanced Digital Communication (4 CR) : Convolutional CodesBalagovind BaluNo ratings yet
- Digital Communication Coding: En. Mohd Nazri Mahmud Mphil (Cambridge, Uk) Beng (Essex, Uk)Document25 pagesDigital Communication Coding: En. Mohd Nazri Mahmud Mphil (Cambridge, Uk) Beng (Essex, Uk)Apram SinghNo ratings yet
- Convolutional CodesDocument7 pagesConvolutional CodesgayathridevikgNo ratings yet
- RimaDocument42 pagesRimaEbti Salah ArabNo ratings yet
- Part2 3 Convolutional CodesDocument38 pagesPart2 3 Convolutional CodesMatthew HughesNo ratings yet
- S.72-227 Digital Communication Systems: Convolutional CodesDocument26 pagesS.72-227 Digital Communication Systems: Convolutional Codesjoydeep12No ratings yet
- Convolution CodesDocument14 pagesConvolution CodeskrishnaNo ratings yet
- Micro Coded Transmitter DesignDocument14 pagesMicro Coded Transmitter DesignJay SinghNo ratings yet
- Comparative Study of Turbo Codes in AWGN Channel Using MAP and SOVA DecodingDocument14 pagesComparative Study of Turbo Codes in AWGN Channel Using MAP and SOVA Decodingyemineniraj33No ratings yet
- Dcs Lab ManualDocument33 pagesDcs Lab ManualKumaran SgNo ratings yet
- Digital Communication Systems by Simon Haykin-105Document6 pagesDigital Communication Systems by Simon Haykin-105matildaNo ratings yet
- Field Programmable Gate Array Implementation of 14 Bit Sigma-Delta Analog To Digital ConverterDocument4 pagesField Programmable Gate Array Implementation of 14 Bit Sigma-Delta Analog To Digital ConverterInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Convolutional Codes706760093Document27 pagesConvolutional Codes706760093Feroza MirajkarNo ratings yet
- Simulation of Convolutional EncoderDocument5 pagesSimulation of Convolutional EncoderInternational Journal of Research in Engineering and TechnologyNo ratings yet
- Error Control Coding3Document24 pagesError Control Coding3DuongMinhSOnNo ratings yet
- Graphical Represntation For Convolutional Encoding:: 1.the Code Tree 2.the Code Trellis 3.the State DiagramDocument8 pagesGraphical Represntation For Convolutional Encoding:: 1.the Code Tree 2.the Code Trellis 3.the State DiagramSwetha Singampalli SNo ratings yet
- Description of The Algorithms (Part 1)Document6 pagesDescription of The Algorithms (Part 1)Darshan Yeshwant MohekarNo ratings yet
- N Carrier Modulatio: Version 2 ECE IIT, KharagpurDocument10 pagesN Carrier Modulatio: Version 2 ECE IIT, KharagpurAayush RajvanshiNo ratings yet
- Design of Convolutional Encoder and Viterbi Decoder Using MATLABDocument7 pagesDesign of Convolutional Encoder and Viterbi Decoder Using MATLABwasiullahNo ratings yet
- Practicum Report Digital Telecommunication: Class TT 2E Khusnul Khotimah 1831130043Document18 pagesPracticum Report Digital Telecommunication: Class TT 2E Khusnul Khotimah 1831130043khusnul khotimahNo ratings yet
- Performance Evaluation For Convolutional Codes Using Viterbi DecodingDocument6 pagesPerformance Evaluation For Convolutional Codes Using Viterbi Decodingbluemoon1172No ratings yet
- DSP AssignmentDocument8 pagesDSP Assignmentanoopk222No ratings yet
- DC Coding and Decoding With Convolutional CodesDocument28 pagesDC Coding and Decoding With Convolutional CodesARAVINDNo ratings yet
- 18ec61 DCDocument146 pages18ec61 DCSadashiv BalawadNo ratings yet
- A Turbo Code TutorialDocument9 pagesA Turbo Code Tutorialmehdimajidi797144No ratings yet
- DD and COmodule 2Document97 pagesDD and COmodule 2Madhura N KNo ratings yet
- 1.1.1 Reed - Solomon Code:: C F (U, U, , U, U)Document4 pages1.1.1 Reed - Solomon Code:: C F (U, U, , U, U)Tân ChipNo ratings yet
- Dpco Book1Document4 pagesDpco Book1SELVAM SNo ratings yet
- Ec6501 DC 1Document79 pagesEc6501 DC 1Santosh KumarNo ratings yet
- Channel CodingDocument45 pagesChannel CodingTu Nguyen NgocNo ratings yet
- Viterbi DecodingDocument4 pagesViterbi DecodingGaurav NavalNo ratings yet
- Experimental Verification of Linear Block Codes and Hamming Codes Using Matlab CodingDocument17 pagesExperimental Verification of Linear Block Codes and Hamming Codes Using Matlab CodingBhavani KandruNo ratings yet
- Improved Low Complexity Hybrid Turbo Codes and Their Performance AnalysisDocument3 pagesImproved Low Complexity Hybrid Turbo Codes and Their Performance AnalysisjesusblessmeeNo ratings yet
- RVLC Code 56456444rDocument5 pagesRVLC Code 56456444rAnonymous n30qTRQPoINo ratings yet
- 4.ASK, FSK and PSKDocument13 pages4.ASK, FSK and PSKSai raghavendraNo ratings yet
- QP CODE 21103239 DE December 2021Document8 pagesQP CODE 21103239 DE December 2021AsjathNo ratings yet
- Bhise2008 Paper in IeeeDocument6 pagesBhise2008 Paper in IeeeHarith NawfelNo ratings yet
- Design A Full Adder by Using Two Half Adders. (7M, May-19)Document10 pagesDesign A Full Adder by Using Two Half Adders. (7M, May-19)Sri Silpa Padmanabhuni100% (1)
- Maximum Likelihood Decoding of Convolutional CodesDocument45 pagesMaximum Likelihood Decoding of Convolutional CodesShathis KumarNo ratings yet
- 4a Convolution CodeDocument22 pages4a Convolution Codeتُحف العقولNo ratings yet
- CPM DemodulationDocument3 pagesCPM Demodulationakkarthik0072933No ratings yet
- Line CodesDocument18 pagesLine Codesu-rush100% (1)
- ConvolutionalcodesDocument30 pagesConvolutionalcodesprakash_oxfordNo ratings yet
- Fu-Hua Huang Chapter 3. Turbo Code EncoderDocument14 pagesFu-Hua Huang Chapter 3. Turbo Code EncoderAmiel ZalduaNo ratings yet
- Spread - Spectrum Modulation: Chapter-7Document22 pagesSpread - Spectrum Modulation: Chapter-7Deepika kNo ratings yet
- Turbo Codes 1. Concatenated Coding System: RS Encoder Algebraic Decoder Layer 2Document27 pagesTurbo Codes 1. Concatenated Coding System: RS Encoder Algebraic Decoder Layer 2Shathis KumarNo ratings yet
- Analysis and Design of Multicell DC/DC Converters Using Vectorized ModelsFrom EverandAnalysis and Design of Multicell DC/DC Converters Using Vectorized ModelsNo ratings yet
- Leadership Training NarrativeDocument2 pagesLeadership Training NarrativeJenifer PaduaNo ratings yet
- Chapte 2Document58 pagesChapte 2Rabaa DooriiNo ratings yet
- Writing Part-FormatDocument15 pagesWriting Part-FormatHappyGreg360No ratings yet
- Full Download Test Bank For Introduction To Econometrics 4th Edition James H Stock PDF Full ChapterDocument36 pagesFull Download Test Bank For Introduction To Econometrics 4th Edition James H Stock PDF Full Chaptersingsong.curlyu2r8bw100% (18)
- Possible Effects of Potential Lahars From Cotopaxi Volcano On Housing Market PricesDocument12 pagesPossible Effects of Potential Lahars From Cotopaxi Volcano On Housing Market Pricesdarwin chapiNo ratings yet
- Method Validation NotesDocument15 pagesMethod Validation NotesRamling PatrakarNo ratings yet
- Chapter IIDocument21 pagesChapter IIJubert IlosoNo ratings yet
- Opem 311Document6 pagesOpem 311MARITONI MEDALLANo ratings yet
- 2204 MaterialityDocument8 pages2204 MaterialitydeeptimanneyNo ratings yet
- Countering Criticism of The Warren Report (Clayton P. Nurnad and Ned Bennett), CIA File Number 201-289248 (Psyop Against 'Conspiracy Theorists') (1967)Document3 pagesCountering Criticism of The Warren Report (Clayton P. Nurnad and Ned Bennett), CIA File Number 201-289248 (Psyop Against 'Conspiracy Theorists') (1967)Quibus_Licet100% (1)
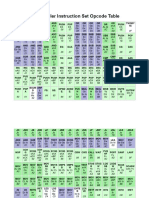
- Intel x86 Assembler Instruction Set Opcode TableDocument9 pagesIntel x86 Assembler Instruction Set Opcode TableMariaKristinaMarasiganLevisteNo ratings yet
- Full Text Anti Graf It TiDocument7 pagesFull Text Anti Graf It TiOlivia AgridulceNo ratings yet
- My Ios TutorialDocument185 pagesMy Ios TutorialBhargav EmnickNo ratings yet
- AbacusDocument13 pagesAbacusdj_jovicaNo ratings yet
- Discrepancies and DivergencesDocument5 pagesDiscrepancies and DivergencesZinck Hansen100% (1)
- Infosys Leadership Development Strategies PDFDocument3 pagesInfosys Leadership Development Strategies PDFanuj.arora02001021No ratings yet
- DLL - Mapeh 4 - Q2 - W6Document6 pagesDLL - Mapeh 4 - Q2 - W6Alexis De LeonNo ratings yet
- Physics ProjectDocument21 pagesPhysics ProjectCoReDevNo ratings yet
- Ayele TilahunDocument81 pagesAyele TilahunJanet Magno De OliveiraNo ratings yet
- JSAloading Test Works ContohDocument2 pagesJSAloading Test Works Contoh6984No ratings yet
- 3RV10314HA10 Datasheet enDocument4 pages3RV10314HA10 Datasheet enGaurav PratapNo ratings yet
- DLL - Mapeh 5 - Q3 - W2Document6 pagesDLL - Mapeh 5 - Q3 - W2Laine Agustin SalemNo ratings yet
- What Is Neo-Liberalism FINALDocument21 pagesWhat Is Neo-Liberalism FINALValentino ArisNo ratings yet
- Seyedeh Fashandi Executive Resume FINALDocument2 pagesSeyedeh Fashandi Executive Resume FINALsfashandi123No ratings yet
- Reservoir EngineeringDocument18 pagesReservoir EngineeringshanecarlNo ratings yet
- Mutual Inhibition, Competition, and Periodicity in A Two Species Chemostat-Like SystemDocument10 pagesMutual Inhibition, Competition, and Periodicity in A Two Species Chemostat-Like Systemmoustafa.mehanna7564No ratings yet
- 11 Grade Instructional Pacing Guide: High School Georgia Standards of Excellence American Literature Curriculum MapDocument12 pages11 Grade Instructional Pacing Guide: High School Georgia Standards of Excellence American Literature Curriculum Mapapi-262173560No ratings yet