You might also like
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlRating: 5 out of 5 stars5/5 (1)
- Study of a reluctance magnetic gearbox for energy storage system applicationFrom EverandStudy of a reluctance magnetic gearbox for energy storage system applicationRating: 1 out of 5 stars1/5 (1)
- Simulation of DFIG Wind Turbines Ride Through CapabilityDocument9 pagesSimulation of DFIG Wind Turbines Ride Through CapabilityDanny LiNo ratings yet
- Power Maximization Control of Small Wind System Using Permanent Magnet Synchronous GeneratorDocument13 pagesPower Maximization Control of Small Wind System Using Permanent Magnet Synchronous GeneratorhassenbbNo ratings yet
- Paper ID 105Document6 pagesPaper ID 105hassenbbNo ratings yet
- Three sensorless control strategies for PMSG in wind systemsDocument9 pagesThree sensorless control strategies for PMSG in wind systemsDhinesh BaluNo ratings yet
- An Improved Efficiency of Fuzzy Sliding Mode Cont PDFDocument5 pagesAn Improved Efficiency of Fuzzy Sliding Mode Cont PDFNoureddine BounaslaNo ratings yet
- Study and Control of A Variable-Speed Wind-Energy System Connected To The GridDocument9 pagesStudy and Control of A Variable-Speed Wind-Energy System Connected To The GridhassenbbNo ratings yet
- Speed Control OF WIND TURBINEDocument4 pagesSpeed Control OF WIND TURBINESHADDOWWNo ratings yet
- New Control Strategies for Small Wind TurbinesDocument6 pagesNew Control Strategies for Small Wind TurbinesZellagui EnergyNo ratings yet
- The Steady-State Interaction of A Grid-Connected Doubly-Fed Induction Generator and The Wind TurbineDocument7 pagesThe Steady-State Interaction of A Grid-Connected Doubly-Fed Induction Generator and The Wind Turbinevenky258No ratings yet
- Maximum Power Point Tracking of Variable Speed Wind Energy Conversion SystemDocument9 pagesMaximum Power Point Tracking of Variable Speed Wind Energy Conversion SystemJoniNo ratings yet
- A Novel Control Strategy of Power Converter Used To Direct Driven Permanent Magnet Wind Power Generation SystemDocument4 pagesA Novel Control Strategy of Power Converter Used To Direct Driven Permanent Magnet Wind Power Generation Systemjamal64722111No ratings yet
- Control The Flywheel Storage System by Fuzzy Logic Associated With The Wind GeneratorDocument7 pagesControl The Flywheel Storage System by Fuzzy Logic Associated With The Wind GeneratorhassenbbNo ratings yet
- Volume (8) Issue (4) 493-507Document15 pagesVolume (8) Issue (4) 493-507Seid BegovicNo ratings yet
- Jjmie: Modeling and Optimization of Wind Turbine Driving Permanent Magnet Synchronous GeneratorDocument6 pagesJjmie: Modeling and Optimization of Wind Turbine Driving Permanent Magnet Synchronous GeneratorhassenbbNo ratings yet
- PMSG ModelingDocument6 pagesPMSG Modelingوليد ابو شاكرNo ratings yet
- A Fuzzy-Logic Based MPPT Method For Stand-Alone Wind Turbine SystemDocument8 pagesA Fuzzy-Logic Based MPPT Method For Stand-Alone Wind Turbine SystemAJER JOURNALNo ratings yet
- Steady State Analysis of PMSG PDFDocument16 pagesSteady State Analysis of PMSG PDF1balamanianNo ratings yet
- Asma TounsiDocument13 pagesAsma TounsiHAFEDH ABIDNo ratings yet
- Hinf Controller Design For A Variable Wind SpeedDocument7 pagesHinf Controller Design For A Variable Wind SpeedDiego Fernando Sanchez FlorezNo ratings yet
- A New Method of Maximum Power Point Tracking For DFIG Based Wind TurbineDocument7 pagesA New Method of Maximum Power Point Tracking For DFIG Based Wind Turbinebalaji06202No ratings yet
- EEE 1201 021 Doubly Fed Induction Wind Turbines PSCAD EMTDCDocument6 pagesEEE 1201 021 Doubly Fed Induction Wind Turbines PSCAD EMTDCShruthi SaNo ratings yet
- SVC ModeloDocument4 pagesSVC ModeloLuc JeanNo ratings yet
- Electrical Braking of Large Wind TurbinesDocument11 pagesElectrical Braking of Large Wind Turbineslaaloo41No ratings yet
- Modeling and Control of Direct Drive Variable Speed Stand-Alone Wind Energy Conversion SystemsDocument6 pagesModeling and Control of Direct Drive Variable Speed Stand-Alone Wind Energy Conversion SystemsSamundra GurungNo ratings yet
- Control of A Wind Energy Conversion System Associated To A Flywheel Energy Storage SystemDocument6 pagesControl of A Wind Energy Conversion System Associated To A Flywheel Energy Storage SystemhassenbbNo ratings yet
- Content ServerDocument15 pagesContent Serverayoub reseauNo ratings yet
- DFIG-Based Wind Turbine Robust Control Using High-Order Sliding Modes and A High Gain ObserverDocument8 pagesDFIG-Based Wind Turbine Robust Control Using High-Order Sliding Modes and A High Gain Observerabdeldjabbar14No ratings yet
- Particle Swarm Optimization Based Sliding Mode Control of Variable Speed Wind Energy Conversion SystemDocument11 pagesParticle Swarm Optimization Based Sliding Mode Control of Variable Speed Wind Energy Conversion SystemBukan Syahrul Yasin LimpoNo ratings yet
- Introdução VariaçãoDocument6 pagesIntrodução VariaçãoTravis GrayNo ratings yet
- PSCAD Based Dynamic ModelingDocument7 pagesPSCAD Based Dynamic ModelingLalith KrishnanNo ratings yet
- Simulation and Analysis of PMSG-based Wind Energy Conversion System Using Different Coverter ModelsDocument5 pagesSimulation and Analysis of PMSG-based Wind Energy Conversion System Using Different Coverter ModelsHamza MahmoodNo ratings yet
- Estimacion CPDocument6 pagesEstimacion CPEdjavier CastilloNo ratings yet
- Speed Control of Induction Motor Fed From Wind Turbine Via Particle Swarm Optimization Based PI ControllerDocument13 pagesSpeed Control of Induction Motor Fed From Wind Turbine Via Particle Swarm Optimization Based PI ControllerHanan MouchtakiriNo ratings yet
- 1 s2.0 S1876610213017268 Main PDFDocument10 pages1 s2.0 S1876610213017268 Main PDFMaroju Santosh KiranNo ratings yet
- Micro-Grid Simulation During Grid-Connected and Islanded Modes of OperationDocument6 pagesMicro-Grid Simulation During Grid-Connected and Islanded Modes of OperationNguyễn Đức NguyệnNo ratings yet
- Benzen-2008-IEEE-ICSET Z-Source Inverter Based Wind Power Generation PDFDocument5 pagesBenzen-2008-IEEE-ICSET Z-Source Inverter Based Wind Power Generation PDFAnoop MathewNo ratings yet
- Wind TurbineDocument5 pagesWind TurbineAnthony WellsNo ratings yet
- Semester I Examinations - 2012/2013Document7 pagesSemester I Examinations - 2012/2013Ismail HussainNo ratings yet
- 11585370Document6 pages11585370Dalibor-Jelena VlaškiNo ratings yet
- Smoothing Wind Power Fluctuations by Particle Swarm Optimization Based Pitch Angle ControllerDocument17 pagesSmoothing Wind Power Fluctuations by Particle Swarm Optimization Based Pitch Angle ControllerMouna Ben SmidaNo ratings yet
- Design and Modeling of Wind Energy Conversion System Based On PMSG Using MPPT TechniqueDocument5 pagesDesign and Modeling of Wind Energy Conversion System Based On PMSG Using MPPT TechniqueijsretNo ratings yet
- Incremental Conductance Technique for Hybrid Wind-Solar SystemDocument4 pagesIncremental Conductance Technique for Hybrid Wind-Solar SystemHanumante AkshayNo ratings yet
- 5 Modeling and Control of Variable Speed Wind Turbine Drive System DynamicsDocument11 pages5 Modeling and Control of Variable Speed Wind Turbine Drive System DynamicsnguyenngocbanNo ratings yet
- APPLICATION OF MATRIX CONVERTER IN WIND PMSGDocument8 pagesAPPLICATION OF MATRIX CONVERTER IN WIND PMSGChetan GhatageNo ratings yet
- Comparison of Different PLL Strategies For Applications in A Wind Generation SystemDocument8 pagesComparison of Different PLL Strategies For Applications in A Wind Generation SystemMorel SangangNo ratings yet
- 4.engineering-Correction of The Mechanical Speed For The Dfig Wind TurbineDocument10 pages4.engineering-Correction of The Mechanical Speed For The Dfig Wind TurbineImpact JournalsNo ratings yet
- Performance Enhancement of Grid Connected Wind Energy Conversion SystemsDocument6 pagesPerformance Enhancement of Grid Connected Wind Energy Conversion Systemskanda71No ratings yet
- Steady State Analysis of Wind TurbineDocument7 pagesSteady State Analysis of Wind TurbineKhy-khy PutraNo ratings yet
- PSCAD-Based Modeling and Flicker Estimation For Wind TurbinesDocument7 pagesPSCAD-Based Modeling and Flicker Estimation For Wind TurbinestunghtdNo ratings yet
- A Stand-Alone Wind Energy Conversion System: Debabrata PalDocument3 pagesA Stand-Alone Wind Energy Conversion System: Debabrata Palashu gslassie100% (1)
- Control Strategy For HVDC Interconnected DC-based Offshore Wind FarmDocument6 pagesControl Strategy For HVDC Interconnected DC-based Offshore Wind FarmTruong HoaNo ratings yet
- Modeling of Wind Energy System With MPPTDocument6 pagesModeling of Wind Energy System With MPPTsbv1986No ratings yet
- 510 TorresDocument6 pages510 TorresnavidelecNo ratings yet
- Conf 1Document5 pagesConf 1sujithadharani9813No ratings yet
- Development of Wind Turbine Simulator For Generator Torque ControlDocument4 pagesDevelopment of Wind Turbine Simulator For Generator Torque ControlDadir AliNo ratings yet
- Wind Generation System For Charging BatteriesDocument6 pagesWind Generation System For Charging BatteriesAmit RanjanNo ratings yet
- Tute Lea 2013Document6 pagesTute Lea 2013venkatachalamNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Vantio CacheServe 7.2.0 Administrators Manual 20161208 PDFDocument577 pagesVantio CacheServe 7.2.0 Administrators Manual 20161208 PDFPaulette Servin100% (1)
- Damage To Stern Tube Bearing and SealsDocument4 pagesDamage To Stern Tube Bearing and SealsJoão Henrique Volpini MattosNo ratings yet
- How To Choose Food StarchesDocument20 pagesHow To Choose Food StarchesBoat Tanin100% (3)
- Report On Corporate Communication Strategy Analysis ofDocument38 pagesReport On Corporate Communication Strategy Analysis ofNAFISA ISLAMNo ratings yet
- Learning One-to-One - Book ReviewDocument3 pagesLearning One-to-One - Book Reviewwhistleblower100% (1)
- Methods of Piling ExplainedDocument3 pagesMethods of Piling ExplainedRajesh KhadkaNo ratings yet
- RCE Unpacking Ebook (Translated by LithiumLi) - UnprotectedDocument2,342 pagesRCE Unpacking Ebook (Translated by LithiumLi) - Unprotecteddryten7507No ratings yet
- Deutz 1013Document3 pagesDeutz 1013Retno Pudji LestariNo ratings yet
- Dissertation ErsatzteilmanagementDocument7 pagesDissertation ErsatzteilmanagementWriteMyEnglishPaperForMeCanada100% (1)
- Stereoscopic Restitution Instruments: Materi Kuliah GD3204 Fotogrametri I, Semester I-2009/2010Document50 pagesStereoscopic Restitution Instruments: Materi Kuliah GD3204 Fotogrametri I, Semester I-2009/2010ththaalNo ratings yet
- Cybersecurity-Student-Book Res Eng 1014Document38 pagesCybersecurity-Student-Book Res Eng 1014Nistor Andreea Maria100% (1)
- B737-B787 QRH Differences: 787 NNC Includes Emergency DescentDocument13 pagesB737-B787 QRH Differences: 787 NNC Includes Emergency DescentUfuk AydinNo ratings yet
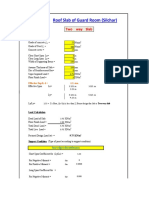
- Roof Slab of Guard RoomDocument3 pagesRoof Slab of Guard RoomAditya KumarNo ratings yet
- JonWeisseBUS450 04 HPDocument3 pagesJonWeisseBUS450 04 HPJonathan WeisseNo ratings yet
- Grant Park Platform Bedroom Set Furniture RowDocument1 pageGrant Park Platform Bedroom Set Furniture Rowjyzjz6sr65No ratings yet
- XHB CommFuncDocument10 pagesXHB CommFuncPalatNo ratings yet
- Msds Thinner 21-06Document8 pagesMsds Thinner 21-06ridhowibiiNo ratings yet
- Piping Class Sdxp10 - 1.4410 - (2507 Superduplex SS)Document3 pagesPiping Class Sdxp10 - 1.4410 - (2507 Superduplex SS)Lucian GrigorasNo ratings yet
- Varco Manual ElevatorDocument54 pagesVarco Manual ElevatorJohn Jairo Simanca Castillo100% (1)
- Performance Estimation of Ofdm-Wimax Network: Vishal Sharma & Navneet KaurDocument8 pagesPerformance Estimation of Ofdm-Wimax Network: Vishal Sharma & Navneet KaurTJPRC PublicationsNo ratings yet
- Questionnaire For Future BLICZerDocument1 pageQuestionnaire For Future BLICZerAlejandra GheorghiuNo ratings yet
- Vlsi Implementation of Integer DCT Architectures For Hevc in Fpga TechnologyDocument12 pagesVlsi Implementation of Integer DCT Architectures For Hevc in Fpga TechnologyRaghul VishnuNo ratings yet
- P8B WS Memory Qualified Vendors List (QVL)Document3 pagesP8B WS Memory Qualified Vendors List (QVL)bolpensmaierNo ratings yet
- Sitsyll PDFDocument57 pagesSitsyll PDFpreranaNo ratings yet
- Ite 001aDocument6 pagesIte 001ajoshuaNo ratings yet
- Atmel 42238 Uart Based Sam Ba Bootloader For Sam d20 AP Note At04189Document12 pagesAtmel 42238 Uart Based Sam Ba Bootloader For Sam d20 AP Note At04189manasaNo ratings yet
- Designing The Marketing Channels 13Document13 pagesDesigning The Marketing Channels 13Gajender SinghNo ratings yet
- HEN SPF Roof Manual Spray Polyurethane FoamDocument77 pagesHEN SPF Roof Manual Spray Polyurethane FoamDavaakhuu ErdeneeNo ratings yet
- Abstract Classes and Methods in Object Oriented ProgrammingDocument13 pagesAbstract Classes and Methods in Object Oriented Programmingkishore1201No ratings yet
- Audio (Amplifier) - Electrical DiagnosticsDocument195 pagesAudio (Amplifier) - Electrical DiagnosticsRafael CherechesNo ratings yet