You might also like
- Forklift Driver Card and Certificate TemplateDocument25 pagesForklift Driver Card and Certificate Templatempac99964% (14)
- English Idioms and PhrasesDocument384 pagesEnglish Idioms and Phrasesthwe thweNo ratings yet
- PE 12 Q3 WK1-2 Understanding On Health Related FitnessDocument8 pagesPE 12 Q3 WK1-2 Understanding On Health Related FitnessEmarkzkie Mosra OrecrebNo ratings yet
- SICAMS - Metrology SubseaDocument17 pagesSICAMS - Metrology SubseaSkee76No ratings yet
- Autonomous Navigatiion Stereo VisionDocument21 pagesAutonomous Navigatiion Stereo VisionBibinNo ratings yet
- Computer Forensics ReportDocument7 pagesComputer Forensics ReportMatias IacobuzioNo ratings yet
- Micromine TutorialDocument5 pagesMicromine TutorialFerdinand Siahaan100% (1)
- The Duty To Warn in Products Liability: Contours and CriticismDocument115 pagesThe Duty To Warn in Products Liability: Contours and CriticismArun HiroNo ratings yet
- Contingency Measures and ProceduresDocument25 pagesContingency Measures and ProceduresKaren Villapando LatNo ratings yet
- Manual en TC1 TD4 Curr 2018-07-16Document39 pagesManual en TC1 TD4 Curr 2018-07-16Daniel Peña100% (1)
- Hawk-Eye: Bachelor of Technology in Electronics & Communication EngineeringDocument12 pagesHawk-Eye: Bachelor of Technology in Electronics & Communication EngineeringRahman JazibNo ratings yet
- PhotogrammetryDocument4 pagesPhotogrammetryJuan CarlosNo ratings yet
- Modeling Observation Uncertainty For Soccer Playing Humanoid RobotsDocument6 pagesModeling Observation Uncertainty For Soccer Playing Humanoid RobotsYash SharmaNo ratings yet
- Release The Use of Self Identifying Targeting For Feature Based MeasurementDocument9 pagesRelease The Use of Self Identifying Targeting For Feature Based MeasurementSyafiq MazlanNo ratings yet
- Photogrammetry PDFDocument8 pagesPhotogrammetry PDFArham SheikhNo ratings yet
- Automatic Video Zooming For Sport Team Video Broadcasting On Smart PhonesDocument8 pagesAutomatic Video Zooming For Sport Team Video Broadcasting On Smart Phonessyahroel778583No ratings yet
- Zoom-Dependent Camera Calibration in Digital Close-Range PhotogrammetryDocument10 pagesZoom-Dependent Camera Calibration in Digital Close-Range PhotogrammetryAndrea LagoNo ratings yet
- HawkeyeDocument29 pagesHawkeyeLovly Ganesh100% (1)
- Advances in Three Dimensional Measurement in Remote Visual InspectionDocument7 pagesAdvances in Three Dimensional Measurement in Remote Visual InspectionTiendatHoangNo ratings yet
- Aspects Regarding Digital Cameras Used in Aerial PhotogrammetryDocument4 pagesAspects Regarding Digital Cameras Used in Aerial PhotogrammetryjesusNo ratings yet
- Digital Image ProcessingDocument13 pagesDigital Image ProcessingSindhuja SambuNo ratings yet
- Payeurl,: Beriault'Document6 pagesPayeurl,: Beriault'infodotzNo ratings yet
- A Foot-Arch Parameter Measurement System Using ADocument26 pagesA Foot-Arch Parameter Measurement System Using AalexNo ratings yet
- Atos Gom Bevel GearDocument6 pagesAtos Gom Bevel Gearkorray1No ratings yet
- A Software Video Stabilization System For Automotive Oriented ApplicationsDocument6 pagesA Software Video Stabilization System For Automotive Oriented Applicationspavan kumar sharmaNo ratings yet
- Near Ground Camera Calibration Procedure For UAV ImageryDocument6 pagesNear Ground Camera Calibration Procedure For UAV ImageryA. AvNo ratings yet
- BadmintostatsanalysisDocument8 pagesBadmintostatsanalysisUltimate AltruistNo ratings yet
- Lecture 3: Cameras & Their Geometry: © 2019 Dr. Sarhat M AdamDocument27 pagesLecture 3: Cameras & Their Geometry: © 2019 Dr. Sarhat M AdamMohannad S ZebariNo ratings yet
- An Automated Method For Computer Vision Analysis of Cannon-Launched Artillery VideoDocument12 pagesAn Automated Method For Computer Vision Analysis of Cannon-Launched Artillery VideoyararaNo ratings yet
- Thesis PhotogrammetryDocument7 pagesThesis Photogrammetrydwrxjhgr100% (2)
- Validation of A Simple One Person Method For Structural Mapping Using SirovisionDocument4 pagesValidation of A Simple One Person Method For Structural Mapping Using SirovisionErmannoRomanNo ratings yet
- Robust Odometry Estimation For RGB-D Cameras: Christian Kerl, J Urgen Sturm, and Daniel CremersDocument8 pagesRobust Odometry Estimation For RGB-D Cameras: Christian Kerl, J Urgen Sturm, and Daniel CremersLegna LopezNo ratings yet
- Thanks: With More Than 1000 Students/ Professors, Subject Experts and Editors Contributing To It Every DayDocument27 pagesThanks: With More Than 1000 Students/ Professors, Subject Experts and Editors Contributing To It Every DayPruthvi SelukarNo ratings yet
- Photogrammetric Accuracy and Modeling of Rolling Shutter CamerasDocument8 pagesPhotogrammetric Accuracy and Modeling of Rolling Shutter CamerasAlexis PfauNo ratings yet
- Hawk Eye TechnologyDocument27 pagesHawk Eye TechnologyGirish KoduriNo ratings yet
- FOTOGRAMETRIADocument39 pagesFOTOGRAMETRIAKamilla MesquitaNo ratings yet
- Accident Reconstruction Via Digital Close-Range PhotogrammetryDocument7 pagesAccident Reconstruction Via Digital Close-Range PhotogrammetryMMillsNo ratings yet
- Cockpit: Assistance System Using Retro-Reflective ProjectionDocument4 pagesCockpit: Assistance System Using Retro-Reflective ProjectionSharad RanpurwalaNo ratings yet
- Tech Doc1111111111Document23 pagesTech Doc1111111111Rajesh MitsNo ratings yet
- Vehicle Tire (Tyre) Detection and Text Recognition Using Deep LearningDocument6 pagesVehicle Tire (Tyre) Detection and Text Recognition Using Deep LearningSolhost NiceNo ratings yet
- First-Person Hyper-Lapse VideosDocument10 pagesFirst-Person Hyper-Lapse VideosInduchoodan RajendranNo ratings yet
- Distance Measurement Based On Pixel Variation of CCD ImagesDocument10 pagesDistance Measurement Based On Pixel Variation of CCD ImagesjowzNo ratings yet
- Photo-Realistic 3D Model Extraction From Camera Array CaptureDocument11 pagesPhoto-Realistic 3D Model Extraction From Camera Array CaptureJohn NaylorNo ratings yet
- An Augmented Reality in Sports Broadcasting and Officiating: Praveena.C.S Roll No 45 S7 CseDocument27 pagesAn Augmented Reality in Sports Broadcasting and Officiating: Praveena.C.S Roll No 45 S7 CsepraveenacsnairNo ratings yet
- Shape Reconstruction of Human Foot From Multi-Camera Images Based On PCA of Human Shape DatabaseDocument8 pagesShape Reconstruction of Human Foot From Multi-Camera Images Based On PCA of Human Shape DatabasefamtaluNo ratings yet
- Uav Localization Using Panoramic Thermal CamerasDocument14 pagesUav Localization Using Panoramic Thermal CamerasManoj LNo ratings yet
- The H E Technology: Errors."Document19 pagesThe H E Technology: Errors."Puja DasNo ratings yet
- Senzor de OrientareDocument6 pagesSenzor de OrientareOlidelaPoliNo ratings yet
- Kamera DigitalDocument30 pagesKamera DigitalLarasaty AyuNo ratings yet
- Single Camera Stereo System Using Prism and MirrorsDocument12 pagesSingle Camera Stereo System Using Prism and MirrorsShashank KaushikNo ratings yet
- 3-D Measurements On PistonsDocument4 pages3-D Measurements On PistonsRajaSekarsajjaNo ratings yet
- 3D Dynamic Modelling and Simulation of A Golf Drive: Procedia EngineeringDocument6 pages3D Dynamic Modelling and Simulation of A Golf Drive: Procedia EngineeringDiana LunguNo ratings yet
- Koordinat FotoDocument22 pagesKoordinat FotoLarasaty AyuNo ratings yet
- Badminton Playing Robot - A Multidisciplinary Test Case in MechatronicsDocument7 pagesBadminton Playing Robot - A Multidisciplinary Test Case in MechatronicsSofyan TsauriNo ratings yet
- Agen 377 Notes Set 1Document17 pagesAgen 377 Notes Set 1BASIL MAYAKANo ratings yet
- Photogrammetry1-Chapter4-Aerial Camera Camera Resolution-NewDocument20 pagesPhotogrammetry1-Chapter4-Aerial Camera Camera Resolution-Newخيري سمير كمالNo ratings yet
- Close-Range Photogrammetry For Accident Reconstruction: July 2005Document10 pagesClose-Range Photogrammetry For Accident Reconstruction: July 2005MMillsNo ratings yet
- Naecon 2018 8556809Document6 pagesNaecon 2018 8556809Anish ShahNo ratings yet
- A Challenge Problem For 2D-3D Imaging of Targets From A Volumetric Data Set in An Urban EnvironmentDocument7 pagesA Challenge Problem For 2D-3D Imaging of Targets From A Volumetric Data Set in An Urban EnvironmentRamon AraújoNo ratings yet
- Application of The Optical 3D Measurement Methods in Sheet Metal ProcessingDocument4 pagesApplication of The Optical 3D Measurement Methods in Sheet Metal Processingkalvino314No ratings yet
- 1957 Jun 558-563Document6 pages1957 Jun 558-563Andenet AshagrieNo ratings yet
- Ias 1660-4556Document10 pagesIas 1660-4556ravindu deshithaNo ratings yet
- 6614 Ijma 01Document19 pages6614 Ijma 01IJMAJournalNo ratings yet
- Global 3D Terrain Maps For Agricultural Applications: Francisco Rovira-MásDocument17 pagesGlobal 3D Terrain Maps For Agricultural Applications: Francisco Rovira-MásApriadi Budi RaharjaNo ratings yet
- Match ATDocument6 pagesMatch ATAzedine BatteurNo ratings yet
- Vision System For Gauging and Automatic Straightening of Steel BarsDocument10 pagesVision System For Gauging and Automatic Straightening of Steel BarsjayanthshettyNo ratings yet
- Calibración CámaraDocument7 pagesCalibración CámaraErick Poumián PalomecNo ratings yet
- Pinhole Camera Model: Understanding Perspective through Computational OpticsFrom EverandPinhole Camera Model: Understanding Perspective through Computational OpticsNo ratings yet
- Paula Moraga (Author) - Geospatial Health Data-Modeling and Visualization With R-InLA and Shiny-Chapman and Hall - CRC (2019)Document295 pagesPaula Moraga (Author) - Geospatial Health Data-Modeling and Visualization With R-InLA and Shiny-Chapman and Hall - CRC (2019)M Khahfi ZuhandaNo ratings yet
- Power - of - Suffering 2Document21 pagesPower - of - Suffering 2jojiNo ratings yet
- Vacuum Braking SystemDocument20 pagesVacuum Braking SystemPrashant RaiNo ratings yet
- Design and Fabrication of Light Electric VehicleDocument14 pagesDesign and Fabrication of Light Electric VehicleAshish NegiNo ratings yet
- Sc10 - Worksheet On Atoms and IonsDocument6 pagesSc10 - Worksheet On Atoms and IonsAnmol AgarwalNo ratings yet
- Sensory Play Activities Kids Will LoveDocument5 pagesSensory Play Activities Kids Will LoveGoh KokMingNo ratings yet
- KITZ - Cast Iron - 125FCL&125FCYDocument2 pagesKITZ - Cast Iron - 125FCL&125FCYdanang hadi saputroNo ratings yet
- Support of Roof and Side in Belowground Coal MinesDocument5 pagesSupport of Roof and Side in Belowground Coal MinesNavdeep MandalNo ratings yet
- Emergency Floatation Helicoptero PDFDocument14 pagesEmergency Floatation Helicoptero PDFterrywhizardhotmail.com The Best Of The Best.No ratings yet
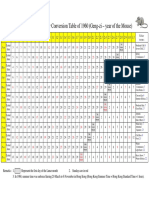
- Gregorian-Lunar Calendar Conversion Table of 1960 (Geng-Zi - Year of The Mouse)Document1 pageGregorian-Lunar Calendar Conversion Table of 1960 (Geng-Zi - Year of The Mouse)Anomali SahamNo ratings yet
- Causal Relationships WorksheetDocument2 pagesCausal Relationships Worksheetledmabaya23No ratings yet
- MC-8002 Mixer 2Document1 pageMC-8002 Mixer 2JAIDEV KUMAR RANINo ratings yet
- REF615 PG 756379 ENs PDFDocument96 pagesREF615 PG 756379 ENs PDFandi mulyanaNo ratings yet
- Sabre V8Document16 pagesSabre V8stefan.vince536No ratings yet
- Minuto hd8761Document64 pagesMinuto hd8761Eugen Vicentiu StricatuNo ratings yet
- Manual Safety Installation Operations Tescom en 123946Document23 pagesManual Safety Installation Operations Tescom en 123946Karikalan JayNo ratings yet
- Rural Marketing MergedDocument146 pagesRural Marketing MergedRishabh HemaniNo ratings yet
- Pursanova IXC ManualDocument16 pagesPursanova IXC ManualHector Serrano MagañaNo ratings yet
- FinancialAccountingTally PDFDocument1 pageFinancialAccountingTally PDFGurjot Singh RihalNo ratings yet
- Variables in The EquationDocument3 pagesVariables in The EquationfiharjatinNo ratings yet
- Concept of ConstitutionDocument32 pagesConcept of ConstitutionDorepe Icon0% (1)
- A A ADocument5 pagesA A ASalvador__DaliNo ratings yet