You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Ecodial enDocument3 pagesEcodial envijaydev75No ratings yet
- ABB XLPE Cable Systems Users Guide Rev 3Document28 pagesABB XLPE Cable Systems Users Guide Rev 3vijaypshindeNo ratings yet
- GALAXY 40P - Service Manual - 141205 - MEDIENDocument89 pagesGALAXY 40P - Service Manual - 141205 - MEDIENARMANDOROSASNo ratings yet
- Testing and Commissioning of MetalClad SwitchgearDocument4 pagesTesting and Commissioning of MetalClad Switchgearvijaydev75100% (1)
- Wire Fuse and SwitchDocument47 pagesWire Fuse and SwitchMacy RiegoNo ratings yet
- TCM HandbookDocument109 pagesTCM Handbookvijaydev75No ratings yet
- Guidelines To Visual Inspection of Electrical Installations - EEPDocument5 pagesGuidelines To Visual Inspection of Electrical Installations - EEPvijaydev75No ratings yet
- Electrical Thumb Rules You MUST Follow (Part 1)Document4 pagesElectrical Thumb Rules You MUST Follow (Part 1)vijaydev75100% (2)
- UK Electrical Industry British Standards BSDocument19 pagesUK Electrical Industry British Standards BSvijaydev75100% (1)
- Electrical Thumb Rules You MUST Follow (Part 4)Document4 pagesElectrical Thumb Rules You MUST Follow (Part 4)vijaydev75No ratings yet
- Fuel - Consumption - Chart - Standard Diesel EngineDocument1 pageFuel - Consumption - Chart - Standard Diesel EngineCaptIsqanNo ratings yet
- Electrical Thumb Rules You MUST Follow (Part 3) : Size of Capacitor For Power Factor CorrectionDocument4 pagesElectrical Thumb Rules You MUST Follow (Part 3) : Size of Capacitor For Power Factor Correctionvijaydev75No ratings yet
- Electrical Thumb Rules You MUST Follow (Part 2)Document2 pagesElectrical Thumb Rules You MUST Follow (Part 2)vijaydev75100% (1)
- CCTVDocument22 pagesCCTVvijaydev75No ratings yet
- The Role of Circuit Breakers in LVMV Power SystemsDocument5 pagesThe Role of Circuit Breakers in LVMV Power Systemsvijaydev75No ratings yet
- Safety Clearance Recommendations For TransformerDocument6 pagesSafety Clearance Recommendations For Transformervijaydev75No ratings yet
- Electrical Engineering Portal - Com Calculating Lightning Strike DistanceDocument2 pagesElectrical Engineering Portal - Com Calculating Lightning Strike Distancevijaydev75No ratings yet
- Electrical Safety Standards For LVMVHV Part2Document13 pagesElectrical Safety Standards For LVMVHV Part2vijaydev75No ratings yet
- Assemblies of Switchgear and Control Panels Part 1Document6 pagesAssemblies of Switchgear and Control Panels Part 1vijaydev75No ratings yet
- Inspection of Voltage Drop in ConductorsDocument2 pagesInspection of Voltage Drop in Conductorsvijaydev75No ratings yet
- Basics of 3-Phase Induction Motor (Part 2) - EEPDocument4 pagesBasics of 3-Phase Induction Motor (Part 2) - EEPvijaydev75No ratings yet
- 2 Unit 2 Hardware Design - DigitalDocument51 pages2 Unit 2 Hardware Design - DigitalAyush SinghNo ratings yet
- Manual For Fluke 438Document18 pagesManual For Fluke 438Main hoon LaHorE -LaHoreEeE Fun & FactsNo ratings yet
- Mpe Installation, Use and Maintenance ManualDocument56 pagesMpe Installation, Use and Maintenance ManualapeirotanNo ratings yet
- Tamil Dubbed Frozen Movies Free Download 720pDocument4 pagesTamil Dubbed Frozen Movies Free Download 720pSaranyaNo ratings yet
- Instrumentation and Measurements BE-56 A&B Fall 2020: Instructor: LT Dr. Col Humayun Zubair KhanDocument35 pagesInstrumentation and Measurements BE-56 A&B Fall 2020: Instructor: LT Dr. Col Humayun Zubair Khanahmad khanNo ratings yet
- Ultrasonic Thickness Gauge NOVOTEST UT-1М-IPDocument4 pagesUltrasonic Thickness Gauge NOVOTEST UT-1М-IPAGNEL V VARKEYNo ratings yet
- A30 (Sm-A305n) BY-SAI MOBILE SOLUTION PDFDocument32 pagesA30 (Sm-A305n) BY-SAI MOBILE SOLUTION PDFabivecueNo ratings yet
- ImpedancematchingDocument17 pagesImpedancematchingRamya RNo ratings yet
- CL-1000 UV Crosslinker ManualDocument22 pagesCL-1000 UV Crosslinker ManualMinghan YongNo ratings yet
- DS - TE6502 - GB - 7296 - Thermocouples For Additional ThermowellDocument7 pagesDS - TE6502 - GB - 7296 - Thermocouples For Additional ThermowellThomasFrenchNo ratings yet
- Figure 2.15 Triggering A Silicon-Controlled: Aircraft Electrical and Electronic Systems 42Document20 pagesFigure 2.15 Triggering A Silicon-Controlled: Aircraft Electrical and Electronic Systems 42Jhony BhatNo ratings yet
- Digital Signal Processing: EC303: September 22 2020Document35 pagesDigital Signal Processing: EC303: September 22 2020V Prakash SinghNo ratings yet
- Ak111 (Three Phases, 50&60hz)Document8 pagesAk111 (Three Phases, 50&60hz)Christian Rivera FloverNo ratings yet
- Measurement of Vibration & Axial DisplacementDocument6 pagesMeasurement of Vibration & Axial DisplacementSatNo ratings yet
- 2step - e 759 5 05.2.3dnDocument128 pages2step - e 759 5 05.2.3dnMarcelo HANo ratings yet
- Sound Amplification SystemDocument8 pagesSound Amplification SystemSrushti KitukaleNo ratings yet
- VSX 1020 K - Brochure PDFDocument2 pagesVSX 1020 K - Brochure PDFJULIUSNo ratings yet
- 627G Wheel Tractor-Scraper Electrical System: Machine Harness Connector and Component LocationsDocument4 pages627G Wheel Tractor-Scraper Electrical System: Machine Harness Connector and Component LocationsMauricio BellidoNo ratings yet
- TIP110, T IP115: Darlington TransistorsDocument5 pagesTIP110, T IP115: Darlington Transistorsمحمدعبدالخالق العلوانيNo ratings yet
- The Laplace TransformDocument22 pagesThe Laplace Transformindrayadi2009No ratings yet
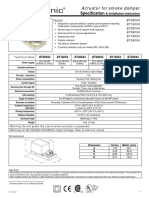
- Specification: Actuator For Smoke DamperDocument2 pagesSpecification: Actuator For Smoke Dampermartin saadNo ratings yet
- Group Delay As I Understand It by JOHN ORAMDocument2 pagesGroup Delay As I Understand It by JOHN ORAMDávid BaltaváriNo ratings yet
- S310 Serise: 200V Class 0.4 1.5KW (0.88 2.9KVA)Document71 pagesS310 Serise: 200V Class 0.4 1.5KW (0.88 2.9KVA)Sdiri OùMaimàNo ratings yet
- Evolution of C-Si: PV Cell TechnologiesDocument52 pagesEvolution of C-Si: PV Cell TechnologiesFábio VelôzoNo ratings yet
- Brochure - Daker - DK - Plus - GB - 10 KVADocument6 pagesBrochure - Daker - DK - Plus - GB - 10 KVASwat Guratai by javed Javed iqbalNo ratings yet
- Design Examples Using The ToolboxDocument23 pagesDesign Examples Using The Toolboxrajeevjain09No ratings yet
- DO880Document4 pagesDO880sitaNo ratings yet
- Starter Pinion TestDocument2 pagesStarter Pinion TestbejoythomasNo ratings yet