You might also like
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Poster QIPDocument1 pagePoster QIPsagarshinde09No ratings yet
- Space TechnologyDocument1 pageSpace TechnologyAnuj GuptaNo ratings yet
- MP 8253,54 Timer SlidesDocument30 pagesMP 8253,54 Timer SlidesAnuj GuptaNo ratings yet
- A Manual MatlabDocument32 pagesA Manual MatlabRohit Vishal Kumar100% (7)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- 3.RC Phase ShiftDocument3 pages3.RC Phase ShiftpoojaNo ratings yet
- PDFDocument2 pagesPDFHassanAhmed100% (1)
- Morse Code TranslatorDocument12 pagesMorse Code Translatorsayan.transcuratorsNo ratings yet
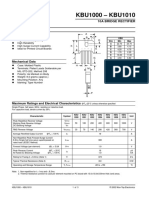
- KBU1000 - KBU1010: FeaturesDocument3 pagesKBU1000 - KBU1010: FeaturesTRUNG Lê ThànhNo ratings yet
- MoldedCaseCircuitBreakers 3VL UL LV18 102019 EN 202003241845573615Document118 pagesMoldedCaseCircuitBreakers 3VL UL LV18 102019 EN 202003241845573615farqad.albajelaniNo ratings yet
- 2CV Series For 230 Vac Capacitor Start Motors and 2VR Series For 230 Vac Capacitor Start/Capacitor Run MotorsDocument2 pages2CV Series For 230 Vac Capacitor Start Motors and 2VR Series For 230 Vac Capacitor Start/Capacitor Run MotorsmachevallieNo ratings yet
- Ferroresonance in Voltage Transformers: Analysis and SimulationsDocument7 pagesFerroresonance in Voltage Transformers: Analysis and SimulationsCitizen AgNo ratings yet
- VLANDocument4 pagesVLANIsmail ChorNo ratings yet
- HD K-BUS Home & Buildind Automation Catalog 2014 PDFDocument20 pagesHD K-BUS Home & Buildind Automation Catalog 2014 PDFlfrn20044593No ratings yet
- Timetable Ee Spring 2015Document2 pagesTimetable Ee Spring 2015Rizwan IqbalNo ratings yet
- Ceramic Resonator - Ceralock - 312547Document43 pagesCeramic Resonator - Ceralock - 312547wayan.wandira8122No ratings yet
- Arduino Inverter230515Document3 pagesArduino Inverter230515Ibrahim Dalafika AbdullahiNo ratings yet
- Pozar 4ed Prob-Ch3Document4 pagesPozar 4ed Prob-Ch3Arlyn BatistaNo ratings yet
- A Survey of Routing Protocols For Underwater Wireless Sensor NetworksDocument24 pagesA Survey of Routing Protocols For Underwater Wireless Sensor NetworksGJ GNANA VENKAT NAGNo ratings yet
- Electronic Instrumentation and Measurements, 3/e David A. BellDocument31 pagesElectronic Instrumentation and Measurements, 3/e David A. Bellsabak gardiaNo ratings yet
- BAOFENG MP31 User Manual 20221121Document19 pagesBAOFENG MP31 User Manual 20221121FRANCISCO ESTEBAN MONTECINOS VASQUEZNo ratings yet
- LCD Monitor: User ManualDocument31 pagesLCD Monitor: User ManualpaulohennebergNo ratings yet
- Data Link Communications Description and OperationDocument1 pageData Link Communications Description and Operation08088338No ratings yet
- 4g CDR New Hos 13bks0479 Pangdua - PL (20221125) - RfsDocument50 pages4g CDR New Hos 13bks0479 Pangdua - PL (20221125) - RfsKehet SiaaNo ratings yet
- ETAP Report (Modified - 4pages)Document4 pagesETAP Report (Modified - 4pages)daniel.cabasa2577No ratings yet
- MOSFET Selector Guide Definitions: Status DescriptionDocument84 pagesMOSFET Selector Guide Definitions: Status DescriptionBanyugeaNo ratings yet
- Ece Mini Project On Embedded Password Based Security Door Lock SystemDocument45 pagesEce Mini Project On Embedded Password Based Security Door Lock SystemJaymin Patel100% (4)
- An4499 Stm32 Nrf51822 Bluetooth Low Energy System Solution StmicroelectronicsDocument44 pagesAn4499 Stm32 Nrf51822 Bluetooth Low Energy System Solution Stmicroelectronicsjkdas12No ratings yet
- Sca NDB Volume-2Document43 pagesSca NDB Volume-2PranabKumarGoswami100% (1)
- ZTE Proposed IP Metro Solution For Aftel V 2.0Document24 pagesZTE Proposed IP Metro Solution For Aftel V 2.0mujibrahmanNo ratings yet
- P.E.L Iec 60076-3-2000 2021-7-20Document2 pagesP.E.L Iec 60076-3-2000 2021-7-20Luis Alfredo Ramos FernandezNo ratings yet
- Multirate Digital Signal Processing PDFDocument85 pagesMultirate Digital Signal Processing PDFSachita Nand MishraNo ratings yet
- Inclined Slotted Waveguide Antenna Design: AbstractDocument5 pagesInclined Slotted Waveguide Antenna Design: AbstractriyazNo ratings yet
- Seminar - Adiabatic Logic DesignDocument24 pagesSeminar - Adiabatic Logic DesignLakshmi Sri K VNo ratings yet
- Sinclair I and Um Controller Ccm30 enDocument30 pagesSinclair I and Um Controller Ccm30 enNecko VejzaNo ratings yet