You might also like
- Emerging Technology Workshop COLADocument3 pagesEmerging Technology Workshop COLARaj Daniel Magno58% (12)
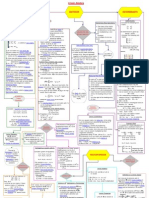
- Linear Algebra Flow Diagram 1Document1 pageLinear Algebra Flow Diagram 1stansmith1100% (1)
- BCA - 1st - SEMESTER - MATH NotesDocument25 pagesBCA - 1st - SEMESTER - MATH Noteskiller botNo ratings yet
- Inventor ReportDocument7 pagesInventor Report2cekal50% (2)
- Linear Algebra Cheat SheetDocument2 pagesLinear Algebra Cheat SheetBrian WilliamsonNo ratings yet
- MATH2101 Cheat SheetDocument3 pagesMATH2101 Cheat SheetWong NgNo ratings yet
- Linear Algebra Cheat SheetDocument3 pagesLinear Algebra Cheat SheetMiriam Quan100% (1)
- Linear Algebra (Bretscher) Chapter 3 Notes: 1 Image and Kernel of A Linear TransformationDocument4 pagesLinear Algebra (Bretscher) Chapter 3 Notes: 1 Image and Kernel of A Linear TransformationAlex NosratNo ratings yet
- Kashif Khan Assignment of Linear Algebra.Document10 pagesKashif Khan Assignment of Linear Algebra.engineerkashif97No ratings yet
- Eigenvalues of GraphsDocument29 pagesEigenvalues of GraphsDenise ParksNo ratings yet
- Linear AlgebraDocument7 pagesLinear Algebrataych03No ratings yet
- Lin Agebra RevDocument18 pagesLin Agebra RevMustafa HaiderNo ratings yet
- Linear Algebra HintsDocument17 pagesLinear Algebra Hintsgeetharaman1699No ratings yet
- Math C1 - Matrices and VectorsDocument7 pagesMath C1 - Matrices and VectorsIvetteNo ratings yet
- Math C1 - Matrices and VectorsDocument14 pagesMath C1 - Matrices and VectorsIvetteNo ratings yet
- Gate Mathematics BasicsDocument11 pagesGate Mathematics Basicsprabhu81No ratings yet
- 2.7.3 Example: 2.2 Matrix AlgebraDocument8 pages2.7.3 Example: 2.2 Matrix Algebrafredy8704No ratings yet
- Rf4002a50 MTH101Document20 pagesRf4002a50 MTH101Abhishek SharmaNo ratings yet
- Vector Spaces: All R Is X-Y Plane R Is A LineDocument6 pagesVector Spaces: All R Is X-Y Plane R Is A LineMahesh AbnaveNo ratings yet
- Questions CoprihensiveVivaDocument3 pagesQuestions CoprihensiveVivapalas1991-1No ratings yet
- Mce371 13Document19 pagesMce371 13Abul HasnatNo ratings yet
- 1 Linear AlgebraDocument5 pages1 Linear AlgebraSonali VasisthaNo ratings yet
- Linear Algebra - Module 1Document52 pagesLinear Algebra - Module 1TestNo ratings yet
- Linear Algebra Review Sheet - Chapter 1: by Vincent FiorentiniDocument2 pagesLinear Algebra Review Sheet - Chapter 1: by Vincent FiorentiniMichika MaedaNo ratings yet
- Math PrimerDocument13 pagesMath Primertejas.s.mathaiNo ratings yet
- Linear Equations Linear AlgebraDocument4 pagesLinear Equations Linear AlgebraSrijit PaulNo ratings yet
- cs530 12 Notes PDFDocument188 pagescs530 12 Notes PDFyohanes sinagaNo ratings yet
- Rank of A MatrixDocument4 pagesRank of A MatrixSouradeep J ThakurNo ratings yet
- Eigenvector and Eigenvalue ProjectDocument10 pagesEigenvector and Eigenvalue ProjectIzzy ConceptsNo ratings yet
- Mit18 06scf11 Ses1.5sumDocument3 pagesMit18 06scf11 Ses1.5sumZille SubhaniNo ratings yet
- Mat133 Reveiw NotesDocument27 pagesMat133 Reveiw NotesDimitre CouvavasNo ratings yet
- S10 Prodigies PPTDocument33 pagesS10 Prodigies PPTKrish GuptaNo ratings yet
- For A Given Vector in 2D Space, Stretching It by A Value of 2 Is CalledDocument23 pagesFor A Given Vector in 2D Space, Stretching It by A Value of 2 Is CalledIgorJales100% (1)
- MathematicsDocument66 pagesMathematicsTUSHIT JHANo ratings yet
- 11 Linearmodels 3Document13 pages11 Linearmodels 3SCRBDusernmNo ratings yet
- Engg AnalysisDocument117 pagesEngg AnalysisrajeshtaladiNo ratings yet
- Linear Algebra Nut ShellDocument6 pagesLinear Algebra Nut ShellSoumen Bose100% (1)
- Solution For Linear SystemsDocument47 pagesSolution For Linear Systemsshantan02No ratings yet
- Hanilen G. Catama February 5, 2014 Bscoe 3 Emath11Document5 pagesHanilen G. Catama February 5, 2014 Bscoe 3 Emath11Hanilen CatamaNo ratings yet
- The Four Fundamental SubspacesDocument4 pagesThe Four Fundamental SubspacesGioGio2020No ratings yet
- Mathematics For Economists Slides - 3Document30 pagesMathematics For Economists Slides - 3HectorNo ratings yet
- Systems of Linear EquationsDocument10 pagesSystems of Linear EquationsDenise ParksNo ratings yet
- Differential Calculus Made Easy by Mark HowardDocument178 pagesDifferential Calculus Made Easy by Mark HowardLeonardo DanielliNo ratings yet
- Week-5 Session 2Document21 pagesWeek-5 Session 2Vinshi JainNo ratings yet
- Vector Space PresentationDocument26 pagesVector Space Presentationmohibrajput230% (1)
- Assignment 2 Kashif KhanDocument17 pagesAssignment 2 Kashif Khanengineerkashif97No ratings yet
- Fom Assignment 1Document23 pagesFom Assignment 11BACS ABHISHEK KUMARNo ratings yet
- On The Topic: Submitted byDocument10 pagesOn The Topic: Submitted byAkshay KumarNo ratings yet
- Vectors and MatricesDocument8 pagesVectors and MatricesdorathiNo ratings yet
- 4 Pictures of The Same Thing: Picture (I) : Systems of Linear EquationsDocument4 pages4 Pictures of The Same Thing: Picture (I) : Systems of Linear EquationsthezackattackNo ratings yet
- MATHEMATICS, Lecture 1: Carmen HerreroDocument28 pagesMATHEMATICS, Lecture 1: Carmen HerreroHun HaiNo ratings yet
- Chapter 26 - Remainder - A4Document9 pagesChapter 26 - Remainder - A4GabrielPaintingsNo ratings yet
- Vectors and MatricesDocument8 pagesVectors and MatricesdorathiNo ratings yet
- Linear Algebra IDocument43 pagesLinear Algebra IDaniel GreenNo ratings yet
- 8 Rank of A Matrix: K J N KDocument4 pages8 Rank of A Matrix: K J N KPanji PradiptaNo ratings yet
- Left Right Pseudo-Inverse PDFDocument4 pagesLeft Right Pseudo-Inverse PDFYang CaoNo ratings yet
- WEEK 5-StudentDocument47 pagesWEEK 5-Studenthafiz patahNo ratings yet
- Rank of A Matrix: M × N M × NDocument4 pagesRank of A Matrix: M × N M × NDevenderNo ratings yet
- An Introduction to Linear Algebra and TensorsFrom EverandAn Introduction to Linear Algebra and TensorsRating: 1 out of 5 stars1/5 (1)
- Basic Traffic Shaping Based On Layer-7 Protocols - MikroTik WikiDocument14 pagesBasic Traffic Shaping Based On Layer-7 Protocols - MikroTik Wikikoulis123No ratings yet
- 16CS3123-Java Programming Course File-AutonomousDocument122 pages16CS3123-Java Programming Course File-AutonomousSyed WilayathNo ratings yet
- Subfiles by Michael CataliniDocument508 pagesSubfiles by Michael Catalinignani123No ratings yet
- Techniques of Integration Thomas FinneyDocument6 pagesTechniques of Integration Thomas FinneyVineet TannaNo ratings yet
- Advanced Excel FormulasDocument318 pagesAdvanced Excel FormulasRatana KemNo ratings yet
- MultiplexersDocument23 pagesMultiplexersAsim WarisNo ratings yet
- Design of An Efficient FIFO Buffer For Network On Chip RoutersDocument4 pagesDesign of An Efficient FIFO Buffer For Network On Chip RoutersAmityUniversity IIcNo ratings yet
- Lab Manuals DDBSDocument67 pagesLab Manuals DDBSzubair100% (1)
- 1617 s4 Mat Whole (Eng) Fe (p2) QusDocument7 pages1617 s4 Mat Whole (Eng) Fe (p2) QusCHIU KEUNG OFFICIAL PRONo ratings yet
- Ma102intro PDFDocument9 pagesMa102intro PDFSarit BurmanNo ratings yet
- Tutorial 7 Introduction To Airbag FoldingDocument12 pagesTutorial 7 Introduction To Airbag Foldingarthurs9792100% (1)
- Mindtree Annual Report 2016 17Document272 pagesMindtree Annual Report 2016 17janpath3834No ratings yet
- SAP Gioia Tauro Terminal ProblemDocument26 pagesSAP Gioia Tauro Terminal Problemapi-3750011No ratings yet
- Pt855tadm b112016Document406 pagesPt855tadm b112016viktorNo ratings yet
- Central Processing Unit: From Wikipedia, The Free EncyclopediaDocument18 pagesCentral Processing Unit: From Wikipedia, The Free EncyclopediaJoe joNo ratings yet
- Monte Carlo Method For Solving A Parabolic ProblemDocument6 pagesMonte Carlo Method For Solving A Parabolic ProblemEli PaleNo ratings yet
- Quick Help For EDI SEZ IntegrationDocument2 pagesQuick Help For EDI SEZ IntegrationsrinivasNo ratings yet
- 135 To 150 Mcqs Word Best McqsDocument3 pages135 To 150 Mcqs Word Best McqsSaadNo ratings yet
- OFDMADocument29 pagesOFDMAterryNo ratings yet
- Resume Writing Tips For FreshersDocument5 pagesResume Writing Tips For FreshersAnshul Tayal100% (1)
- Chi-Square, Student's T and Snedecor's F DistributionsDocument20 pagesChi-Square, Student's T and Snedecor's F DistributionsASClabISBNo ratings yet
- Brall 2007Document6 pagesBrall 2007ronaldNo ratings yet
- DDR3 VsDocument3 pagesDDR3 VsMichael NavarroNo ratings yet
- Arcswat Manual PDFDocument64 pagesArcswat Manual PDFguidoxlNo ratings yet
- As 400Document162 pagesAs 400avez4uNo ratings yet
- Mc-Simotion Scout ConfiguringDocument298 pagesMc-Simotion Scout ConfiguringBruno Moraes100% (1)
- FC1 625Document50 pagesFC1 625LOL1044No ratings yet
- 26 Time-Management, Productivity TricksDocument28 pages26 Time-Management, Productivity TricksShahzeb AnwarNo ratings yet