You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- POH NAVAJO Pa-31Document438 pagesPOH NAVAJO Pa-31Mantenimiento CMA68475% (4)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- 1D Kalman Filter - ShoudongDocument9 pages1D Kalman Filter - ShoudongSohibul HajahNo ratings yet
- Assessment Case Based Method Dan Project Based LearningDocument25 pagesAssessment Case Based Method Dan Project Based LearningSohibul HajahNo ratings yet
- Matrik Korelasi ISOvsIWAvsBANvsMBNQADocument63 pagesMatrik Korelasi ISOvsIWAvsBANvsMBNQASohibul HajahNo ratings yet
- RPARC Version 2018Document14 pagesRPARC Version 2018Sohibul HajahNo ratings yet
- GX Works3 Ver1 - Operating Manual SH (NA) - 081215-Y (12.19)Document802 pagesGX Works3 Ver1 - Operating Manual SH (NA) - 081215-Y (12.19)Sohibul Hajah100% (2)
- Sensor GasDocument8 pagesSensor GasSohibul HajahNo ratings yet
- Experiments in Princ by David E. L WWW Bookfind BizDocument321 pagesExperiments in Princ by David E. L WWW Bookfind BizSohibul HajahNo ratings yet
- Sensor Dan Transduser: Pengertian Dan Prinsip DasarDocument33 pagesSensor Dan Transduser: Pengertian Dan Prinsip DasarSohibul HajahNo ratings yet
- YaaaDocument354 pagesYaaaSohibul Hajah100% (1)
- World of MetalsDocument36 pagesWorld of Metalsnavanee2008No ratings yet
- Storace (2004) - Piecewise-Linear Approximation of Nonlinear Dynamical SystemsDocument13 pagesStorace (2004) - Piecewise-Linear Approximation of Nonlinear Dynamical SystemsSohibul HajahNo ratings yet
- MODEL MATCHING For NONLINEAR SYSTEMS Not Having The State Space RealizationDocument5 pagesMODEL MATCHING For NONLINEAR SYSTEMS Not Having The State Space RealizationSohibul HajahNo ratings yet
- Modeling Helicopter UAV: Carl ThibaultDocument12 pagesModeling Helicopter UAV: Carl ThibaultSohibul HajahNo ratings yet
- Extended Kalman Filter Based Speed Sensor Less PMSM Control With Load ReconstructionDocument16 pagesExtended Kalman Filter Based Speed Sensor Less PMSM Control With Load ReconstructionSohibul HajahNo ratings yet
- State Space A To NPGMV ControlDocument43 pagesState Space A To NPGMV ControlSohibul HajahNo ratings yet
- An Introduction To Nonlinear Model Predictive ControlDocument23 pagesAn Introduction To Nonlinear Model Predictive ControlSohibul HajahNo ratings yet
- IMDSDocument13 pagesIMDSJohn OoNo ratings yet
- 4 Contamination Control 2Document61 pages4 Contamination Control 2Vijay RajaindranNo ratings yet
- IA SeriesDocument20 pagesIA Seriessina20795No ratings yet
- SFF 8448Document8 pagesSFF 8448eleptonNo ratings yet
- While Start Drive Test Learning, You Must Know The Basic Things! These All Conotents Are at Introductory LevelDocument15 pagesWhile Start Drive Test Learning, You Must Know The Basic Things! These All Conotents Are at Introductory LevelRakesh SolankiNo ratings yet
- UAMDocument35 pagesUAMVishnu R PuthusseryNo ratings yet
- State of Patriot MissilesDocument13 pagesState of Patriot MissilesTaira Mai100% (1)
- Ufgs 33 52 43.13Document40 pagesUfgs 33 52 43.13Tendai Felex MadukeNo ratings yet
- Lube-Tech: Lubricants For Wind TurbinesDocument6 pagesLube-Tech: Lubricants For Wind TurbinesMC ANo ratings yet
- L19 External DiffusionDocument30 pagesL19 External DiffusionEga NabellaNo ratings yet
- Tools of BiotechnologyDocument10 pagesTools of Biotechnologyiamforu1No ratings yet
- Cfw300 Manual 1Document124 pagesCfw300 Manual 1maurilioNo ratings yet
- Role of QAQC Eng.Document38 pagesRole of QAQC Eng.arunkumar100% (2)
- Gsk980Tda Turning Machine CNC System: CharacteristicsDocument10 pagesGsk980Tda Turning Machine CNC System: CharacteristicsPramod YadavNo ratings yet
- 101.S-4501 Steamer Cyclone Cleaning ProcedureDocument6 pages101.S-4501 Steamer Cyclone Cleaning ProcedureTRONGKIMNo ratings yet
- Master Thesis: Tasuku KanedaDocument77 pagesMaster Thesis: Tasuku Kanedamkali345No ratings yet
- 545 ELP-ES-2011 - Catálogo de DisipadoresDocument24 pages545 ELP-ES-2011 - Catálogo de DisipadoresrichkidNo ratings yet
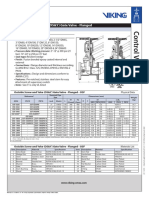
- Outside Screw and Yoke (OS&Y) Gate Valve - Flanged: Technical FeaturesDocument2 pagesOutside Screw and Yoke (OS&Y) Gate Valve - Flanged: Technical FeaturesMark Louie GuintoNo ratings yet
- AY 2015-16cvbbnjDocument245 pagesAY 2015-16cvbbnjSyed Abdul AzizNo ratings yet
- Grid Synchronization of Power Converters Using Multiple Second Order Generalized IntegratorsDocument6 pagesGrid Synchronization of Power Converters Using Multiple Second Order Generalized IntegratorsJandfor Tansfg ErrottNo ratings yet
- Catalogo Bulldog Jgo Empacaduras Maquinas+Motores Todo en UnoDocument78 pagesCatalogo Bulldog Jgo Empacaduras Maquinas+Motores Todo en UnoAlexis SanchezNo ratings yet
- BC 20s HandbuchDocument173 pagesBC 20s HandbuchmanoharNo ratings yet
- Forged - Pipe - Fittings - ANSI - B-16.11 PDFDocument1 pageForged - Pipe - Fittings - ANSI - B-16.11 PDFImran KamalNo ratings yet
- Chapter - I: Hydro DriveDocument19 pagesChapter - I: Hydro Drivekuldeep ududholiraNo ratings yet
- BX-74 / BX-78: Sliding Gate Operator BX SeriesDocument24 pagesBX-74 / BX-78: Sliding Gate Operator BX SeriesStefce PetrovNo ratings yet
- Technical LetteringDocument12 pagesTechnical LetteringMaverick Timbol50% (2)
- Home,: A Solace To Which A Journey Is Never Too Long..Document25 pagesHome,: A Solace To Which A Journey Is Never Too Long..Duvonto RealtyNo ratings yet
- Investigate The Natural Time Period, Base Shear, Displacement, Story Drift, Story Stiffness by Etabs and Staad ProDocument4 pagesInvestigate The Natural Time Period, Base Shear, Displacement, Story Drift, Story Stiffness by Etabs and Staad ProEditor IJTSRDNo ratings yet
- ARO Pump ManualDocument8 pagesARO Pump Manualrazaq athabNo ratings yet