You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5807)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (843)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (346)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Ya Rayah: Win Emsaphere Dahmane El HarrachiDocument2 pagesYa Rayah: Win Emsaphere Dahmane El HarrachiMohamed BerririNo ratings yet
- A Novel Load Sharing Control Technique For Paralleled InvertersDocument6 pagesA Novel Load Sharing Control Technique For Paralleled InvertersMohamed BerririNo ratings yet
- Electric Machines and DrivesDocument274 pagesElectric Machines and Drivesachut01100% (1)
- A Master and Slave Control Strategy For Parallel Operation of Three-Phase UPS Systems With Different Ratings48Document7 pagesA Master and Slave Control Strategy For Parallel Operation of Three-Phase UPS Systems With Different Ratings48Mohamed BerririNo ratings yet
- Review On Frequency Control of Power Systems With Wind Power Penetration51Document8 pagesReview On Frequency Control of Power Systems With Wind Power Penetration51Mohamed BerririNo ratings yet
- A Master-Slave Approach To Aircraft Engine Bleed Flow Sharing Control50Document7 pagesA Master-Slave Approach To Aircraft Engine Bleed Flow Sharing Control50Mohamed BerririNo ratings yet
- A New Automatic Load Control For Turbine Generators96Document6 pagesA New Automatic Load Control For Turbine Generators96Mohamed BerririNo ratings yet
- A Torque Control Method of Three-Inertia Torsional System With Backlash856Document6 pagesA Torque Control Method of Three-Inertia Torsional System With Backlash856Mohamed BerririNo ratings yet
- P Winning Submission: Atroll U.S. Patent 6,917,304Document7 pagesP Winning Submission: Atroll U.S. Patent 6,917,304Jennifer M GallagherNo ratings yet
- Raspberry Pi and Arduino Based Automated Irrigation System: Sneha AngalDocument4 pagesRaspberry Pi and Arduino Based Automated Irrigation System: Sneha AngalRahulNo ratings yet
- EC8553 DTSP (Question Bank)Document13 pagesEC8553 DTSP (Question Bank)gopperumdeviNo ratings yet
- Manual Basler Avr Decs250Document344 pagesManual Basler Avr Decs250dhinakaranNo ratings yet
- Ø25 Illuminated Push Buttons IDEC TWS Series CATALOG 3961Document35 pagesØ25 Illuminated Push Buttons IDEC TWS Series CATALOG 3961Đào MạnhNo ratings yet
- Azbil, Smart Valve PositionerDocument180 pagesAzbil, Smart Valve PositionerRangga TaufiqurahmanNo ratings yet
- CATALOGUE-Set Free Kyosho Brochure PDFDocument20 pagesCATALOGUE-Set Free Kyosho Brochure PDFShubham PopliNo ratings yet
- Piezoelectric or Strain Gauge Based Force TransducersDocument5 pagesPiezoelectric or Strain Gauge Based Force TransducersAydinNo ratings yet
- M.M.Engineering College, Mullana B.Tech-3Rd Sem., 1St Sessional Test Date SheetDocument4 pagesM.M.Engineering College, Mullana B.Tech-3Rd Sem., 1St Sessional Test Date SheettrayambNo ratings yet
- Mpu 6000 Ev Board1Document13 pagesMpu 6000 Ev Board1Muhammad Firza AsharNo ratings yet
- E-895 EL Est R0 STG 0 05 1711Document20 pagesE-895 EL Est R0 STG 0 05 1711sultanprinceNo ratings yet
- EFY Express January 2023 PDFDocument92 pagesEFY Express January 2023 PDFLone WolfNo ratings yet
- Radio 4499 Datasheet - 1Document5 pagesRadio 4499 Datasheet - 1PAOLO RODRIGUEZ GARCIA0% (1)
- EMEA - APAC Valves & Actuators Catalog 2018 F-27878Document110 pagesEMEA - APAC Valves & Actuators Catalog 2018 F-27878aathifNo ratings yet
- RG-WLAN Series Access Point RGOS Configuration Guide, Release 11.1 (5) B6 PDFDocument863 pagesRG-WLAN Series Access Point RGOS Configuration Guide, Release 11.1 (5) B6 PDFWandiSetiaNo ratings yet
- PSM Veena Project 19-20 - 1Document69 pagesPSM Veena Project 19-20 - 1Atul KumarNo ratings yet
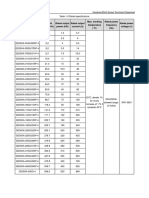
- GD350ddA Series Technical DatasheetDocument1 pageGD350ddA Series Technical Datasheetaabbcc ccbbaaNo ratings yet
- MSH DCM 0001Document2 pagesMSH DCM 0001NAMELESS ASHENNo ratings yet
- Datasheet 9000Document2 pagesDatasheet 9000LucasNo ratings yet
- Dual Ingecon Sun U B Series Family at 1500vdcDocument4 pagesDual Ingecon Sun U B Series Family at 1500vdcRoberto SNo ratings yet
- Infineon-ApplicationNote EvaluationBoard 80W SMPS QR PWM Controller ICE2QS02G - An-V01 00-EnDocument16 pagesInfineon-ApplicationNote EvaluationBoard 80W SMPS QR PWM Controller ICE2QS02G - An-V01 00-EnvarimasrNo ratings yet
- SEBU7789-00 - Operation & Maintenance, Service InformationDocument5 pagesSEBU7789-00 - Operation & Maintenance, Service InformationSayed Younis SadaatNo ratings yet
- Com - Fundamentals QuizDocument3 pagesCom - Fundamentals QuizRogelyn MangampoNo ratings yet
- Leaper-1A: Handy Digital IC TesterDocument1 pageLeaper-1A: Handy Digital IC TesterJon KiNo ratings yet
- MASTERING ECG LEADS - Bipolar Limb LeadsDocument4 pagesMASTERING ECG LEADS - Bipolar Limb LeadsSharan MurugaboopathyNo ratings yet
- Network Administration - OSI Data Link Layer 2023Document16 pagesNetwork Administration - OSI Data Link Layer 2023Krenz selegnaNo ratings yet
- Daewoo+Dsa 123l+serviceDocument133 pagesDaewoo+Dsa 123l+servicemiltoncgNo ratings yet
- 160.80-RP3!3!07 YS Style E Optiview Control CenterDocument12 pages160.80-RP3!3!07 YS Style E Optiview Control CenterCheetah JimNo ratings yet
- U209B M AtmelDocument19 pagesU209B M Atmelyassine yassineNo ratings yet
- OM ProC EMDocument48 pagesOM ProC EMSam0% (1)