You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- 10 1109@TMTT 2002 807846 PDFDocument5 pages10 1109@TMTT 2002 807846 PDFBilal MushtaqNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- National Technology Council: Application For RegistrationDocument3 pagesNational Technology Council: Application For RegistrationBilal Mushtaq0% (1)
- Electrical EngineeringDocument200 pagesElectrical EngineeringEhsan Elahi BashirNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Comments of IEEE-T-ITS-14-5-0337Document1 pageThe Comments of IEEE-T-ITS-14-5-0337Bilal MushtaqNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Reality of TasawwufDocument76 pagesThe Reality of TasawwufShaikh Mohammad Iqbal K67% (3)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- (IET Control Engineering Serie - Unknown - 3782 PDFDocument154 pages(IET Control Engineering Serie - Unknown - 3782 PDFBilal Mushtaq100% (1)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- G# # Name # Area Problem Statement Proposed Solution Available SolutionsDocument1 pageG# # Name # Area Problem Statement Proposed Solution Available SolutionsBilal MushtaqNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Ishq Ka Sheen by Aleem Ul Haq Haqi Part 1+2+3+4Document0 pagesIshq Ka Sheen by Aleem Ul Haq Haqi Part 1+2+3+4Bilal Mushtaq100% (2)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- (Umaira Ahmed) Hum Kahan Kay Sachay Thay (Novel # 0083)Document96 pages(Umaira Ahmed) Hum Kahan Kay Sachay Thay (Novel # 0083)Muhammad Usman Khan81% (21)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Object XMLDocumentDocument33 pagesObject XMLDocumentBilal MushtaqNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Information TechnologyDocument63 pagesInformation TechnologyBilal MushtaqNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Course OutlineDocument2 pagesCourse OutlineBilal MushtaqNo ratings yet
- Chaos TheoryDocument77 pagesChaos TheoryshhtiklaNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- From The Beaches of Spain DMDocument49 pagesFrom The Beaches of Spain DMBilal MushtaqNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Elyse Gementiza - Task 6Document4 pagesElyse Gementiza - Task 6Sean Lester S. Nombrado100% (1)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- National Science Education Standards Compare NGSS To Existing State Standards About The Next Generation Science StandardsDocument3 pagesNational Science Education Standards Compare NGSS To Existing State Standards About The Next Generation Science StandardsROMEL A. ESPONILLANo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- EDUU 512 RTI Case Assignment DescriptionDocument2 pagesEDUU 512 RTI Case Assignment DescriptionS. Kimberly LaskoNo ratings yet
- Running Head: Emotional Intelligence Leadership Theory 1Document8 pagesRunning Head: Emotional Intelligence Leadership Theory 1api-509672908No ratings yet
- 2 - Life Skills Class VIIDocument282 pages2 - Life Skills Class VIIAnand100% (2)
- Case Study & Article of Consumer PsychologyDocument6 pagesCase Study & Article of Consumer Psychologyamber shahNo ratings yet
- Lesson 2-4: Sc-Sci 1 - Teaching Science in The Elementary GradesDocument25 pagesLesson 2-4: Sc-Sci 1 - Teaching Science in The Elementary GradesAnika Gabrielle SeNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- TeachingwithpovertyinmindbookstudyDocument4 pagesTeachingwithpovertyinmindbookstudyapi-278024410No ratings yet
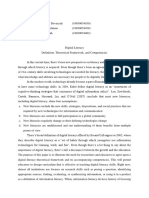
- Digital LiteracyDocument3 pagesDigital LiteracyNinis NasyaNo ratings yet
- 2 Document Reality PDFDocument3 pages2 Document Reality PDFNicole TapiaNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Lesson Plan For Observation A Detailed Lesson Plan in Grade 9Document3 pagesLesson Plan For Observation A Detailed Lesson Plan in Grade 9Gerald E Baculna40% (5)
- Teaching Strategies For Large Class SizeDocument21 pagesTeaching Strategies For Large Class SizeSachin KhotNo ratings yet
- Unit 06 Writing Process6 PDFDocument2 pagesUnit 06 Writing Process6 PDFmaribelNo ratings yet
- Mirari Saenz de ViteriDocument2 pagesMirari Saenz de VitericevimiNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- The Constructivist Turn in IR Theory - Jeffrey CheckelDocument26 pagesThe Constructivist Turn in IR Theory - Jeffrey CheckelAditya Rahman Fadly100% (1)
- Chapter 2 - Opportunity Recognition and Design Thinking: Learning ObjectivesDocument6 pagesChapter 2 - Opportunity Recognition and Design Thinking: Learning ObjectivesMuhammad FaizanNo ratings yet
- Navigate Pre-Intermediate Wordlist Unit 3Document2 pagesNavigate Pre-Intermediate Wordlist Unit 3DescargadorxdNo ratings yet
- An Integrated Model of Factors Affecting Consumer Attitudes PDFDocument27 pagesAn Integrated Model of Factors Affecting Consumer Attitudes PDFAbed EmadNo ratings yet
- Describe With Examples, The Three Inference Rules Involving QuantifiersDocument10 pagesDescribe With Examples, The Three Inference Rules Involving QuantifiersalbertspadeNo ratings yet
- Ethical CommunicationDocument8 pagesEthical CommunicationConstance BandaNo ratings yet
- Delft Design GuideDocument10 pagesDelft Design GuideMostafa Abd el-azizNo ratings yet
- Simulation and Modelling (R18 Syllabus) (19.06.2019)Document2 pagesSimulation and Modelling (R18 Syllabus) (19.06.2019)dvrNo ratings yet
- Managing ConflictDocument16 pagesManaging ConflictGwenNo ratings yet
- Hegel's Recollection: A Study of Image in The Phenomenology of SpiritDocument11 pagesHegel's Recollection: A Study of Image in The Phenomenology of Spiritdanielschwartz88No ratings yet
- Learners With Difficulty in Basic Learning and Applying Knowledge Grade 6 and SHSDocument74 pagesLearners With Difficulty in Basic Learning and Applying Knowledge Grade 6 and SHSChristian AguirreNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Elements of Practical Loss Control LeadershipDocument10 pagesElements of Practical Loss Control LeadershipAnonymous vmw7z1WHmNo ratings yet
- LP Week 6 7 1Document7 pagesLP Week 6 7 1LZ GonzalesNo ratings yet
- The MIT Press Fall 2009 Announcement CatalogDocument108 pagesThe MIT Press Fall 2009 Announcement CatalogThe MIT Press100% (20)
- Inb 372 Course Outline Summer 2022Document6 pagesInb 372 Course Outline Summer 2022Imrul JoyNo ratings yet
- Past Simple or Present PerfectDocument2 pagesPast Simple or Present Perfectcorynik100% (2)