You might also like
- Parallel ArchitecturesDocument56 pagesParallel ArchitectureskalscribNo ratings yet
- New Text DocumentDocument1 pageNew Text DocumentHarshJindalNo ratings yet
- 1024 TextschemeDocument1 page1024 TextschemeImran WafiNo ratings yet
- UNITDocument4 pagesUNITHarshJindalNo ratings yet
- CreditsDocument1 pageCreditsanon-127181No ratings yet
- UNIT-II Shunt Compensation StatcomDocument35 pagesUNIT-II Shunt Compensation StatcomHarshJindalNo ratings yet
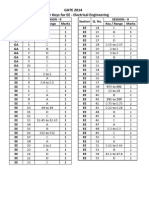
- GATE 2014 Answer Keys For EE Electrical EngineeringDocument1 pageGATE 2014 Answer Keys For EE Electrical Engineeringsreenivasroyal8No ratings yet
- Half-Life Version 1.1.1.1 Readme File 12/2/02Document18 pagesHalf-Life Version 1.1.1.1 Readme File 12/2/02MemMinhNo ratings yet
- The Engineer's Guide To Standards ConversionDocument60 pagesThe Engineer's Guide To Standards ConversionHarshJindalNo ratings yet
- Imp. Note For Course Planner: Please Refer To The Revised Guidelines For Preparation of Instruction Plan (Document Enclosed)Document8 pagesImp. Note For Course Planner: Please Refer To The Revised Guidelines For Preparation of Instruction Plan (Document Enclosed)HarshJindalNo ratings yet
- Unit 1 BasicsDocument18 pagesUnit 1 BasicsHarshJindalNo ratings yet
- SerialDocument1 pageSerialJuliodx CesarNo ratings yet
- SerialDocument1 pageSerialJuliodx CesarNo ratings yet
- Wavelets For Kids BDocument15 pagesWavelets For Kids Bdebd1989No ratings yet
- Induction MotorsDocument50 pagesInduction MotorsHarshJindalNo ratings yet
- The Engineer's Guide To Decoding & EncodingDocument49 pagesThe Engineer's Guide To Decoding & EncodingHarshJindalNo ratings yet
- Digital SystemsDocument32 pagesDigital SystemsHarshJindalNo ratings yet
- OpticDocument1 pageOpticHarshJindal0% (1)
- Imp. Note For Course Planner: Please Refer To The Revised Guidelines For Preparation of Instruction Plan (Document Enclosed)Document8 pagesImp. Note For Course Planner: Please Refer To The Revised Guidelines For Preparation of Instruction Plan (Document Enclosed)HarshJindalNo ratings yet
- Wind Charge Controller Based On The 555 ChipDocument11 pagesWind Charge Controller Based On The 555 ChipHarshJindalNo ratings yet
- JNFDocument7 pagesJNFHarshJindalNo ratings yet
- Assignment 1 ECE-354 Communication System II: S o o S o oDocument1 pageAssignment 1 ECE-354 Communication System II: S o o S o oBharadwaj KotamarthiNo ratings yet
- Electric Power Distribution System Engineering (746 Pages)Document749 pagesElectric Power Distribution System Engineering (746 Pages)Nicolla TeslaNo ratings yet
- Naca 0012Document10 pagesNaca 0012Mohit GulatiNo ratings yet
- Higher Algebra - Hall & KnightDocument593 pagesHigher Algebra - Hall & KnightRam Gollamudi100% (2)
- Assignment Nov 2012Document2 pagesAssignment Nov 2012HarshJindalNo ratings yet
- Power Electronics Lab ExperimentsDocument20 pagesPower Electronics Lab ExperimentsJc ReddyNo ratings yet
- Higher Algebra - Hall & KnightDocument593 pagesHigher Algebra - Hall & KnightRam Gollamudi100% (2)
- Higher Algebra - Hall & KnightDocument593 pagesHigher Algebra - Hall & KnightRam Gollamudi100% (2)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Atrato Instruction ManualDocument8 pagesAtrato Instruction ManualRoyAlvaNo ratings yet
- Samsung Plasma 42d5sDocument89 pagesSamsung Plasma 42d5sJorge Tom Simpson Cruz100% (6)
- Irf640n PDFDocument12 pagesIrf640n PDFLeonel Antonio100% (1)
- ECE102 - F12 LecSet 8 PDFDocument59 pagesECE102 - F12 LecSet 8 PDFEce RljitNo ratings yet
- FSK Demodulator With PLLDocument5 pagesFSK Demodulator With PLLFlashPTNo ratings yet
- CHAPTER VII Direct Current Circuits NEWDocument20 pagesCHAPTER VII Direct Current Circuits NEWVydia Ridha AriatiNo ratings yet
- Quick Charge Device List PDFDocument20 pagesQuick Charge Device List PDFEnoNo ratings yet
- Samsung UN32EH4000 Chasis U71A B PDFDocument108 pagesSamsung UN32EH4000 Chasis U71A B PDFautrera50% (2)
- IO Design, ESDDocument18 pagesIO Design, ESDashishmanyanNo ratings yet
- Excel Containment SizingDocument7 pagesExcel Containment SizingAbraham JyothimonNo ratings yet
- Small Signal Operation and Model: Assignment-3Document15 pagesSmall Signal Operation and Model: Assignment-3Keshavamurthy LNo ratings yet
- RW748U 700W 48V DC Wall Mount RectifierDocument2 pagesRW748U 700W 48V DC Wall Mount RectifierGuillermo OvelarNo ratings yet
- Polimeros Adhesivos y Conductores de ElectricidadDocument66 pagesPolimeros Adhesivos y Conductores de ElectricidadDAYANA ALEJANDRA LNPEZ LUJNNNo ratings yet
- Measuring Partial Discharge in Stator Windings Using 80-PF Line Couplers - HydroWorldDocument8 pagesMeasuring Partial Discharge in Stator Windings Using 80-PF Line Couplers - HydroWorldKrishantha Ganga HemaratneNo ratings yet
- Application Seeking Grant-In-Aid From Drdo For Organising A Workshop Event For DRDO UseDocument4 pagesApplication Seeking Grant-In-Aid From Drdo For Organising A Workshop Event For DRDO Usehakkem bNo ratings yet
- 12V DC To 40V DC Converter Circuit DiagramDocument10 pages12V DC To 40V DC Converter Circuit DiagramAhdiat Darmawan LubisNo ratings yet
- Materials of The Earth Crust: Chemical Composition Rock-Forming MineralsDocument19 pagesMaterials of The Earth Crust: Chemical Composition Rock-Forming MineralsMbiko SabeyoNo ratings yet
- Combiflex 1MRK 513 003 BENDocument28 pagesCombiflex 1MRK 513 003 BENRanjit RjtNo ratings yet
- FP5217Document14 pagesFP5217عبدالله ابراهيمNo ratings yet
- IEEE STD 43-2010 Recommended Practice For Testing Insulation Resistance of Electric MachineryDocument36 pagesIEEE STD 43-2010 Recommended Practice For Testing Insulation Resistance of Electric MachineryJhonNo ratings yet
- 3 s2.0 B9781895198843500168 MainDocument18 pages3 s2.0 B9781895198843500168 MainYiğit IlgazNo ratings yet
- LED in PhysicsDocument10 pagesLED in PhysicsArian SalemNo ratings yet
- FX3G ManualDocument24 pagesFX3G ManualpfalencarNo ratings yet
- Vi Characteristics of PN Junction DiodeDocument17 pagesVi Characteristics of PN Junction DiodePranay PathadeNo ratings yet
- 4 Ways To Test A Transistor - WikiHowDocument12 pages4 Ways To Test A Transistor - WikiHowH ChanakyaNo ratings yet
- Miller Thunderbolt XL AC-DCDocument2 pagesMiller Thunderbolt XL AC-DCMphilipT100% (1)
- Bruker Axs Saxs Webinar XRDDocument119 pagesBruker Axs Saxs Webinar XRDhafizalNo ratings yet
- Acjt2 JiejieDocument7 pagesAcjt2 JiejieNirmal NepalNo ratings yet
- Precision 2.5V FGA™ Voltage Reference: X60008B-25 X60008C-25 X60008D-25Document10 pagesPrecision 2.5V FGA™ Voltage Reference: X60008B-25 X60008C-25 X60008D-25Alejandro HerediaNo ratings yet
- Thesis - Robust Control of Power Electronic ConvertersDocument172 pagesThesis - Robust Control of Power Electronic ConvertersDhananjayNo ratings yet