You might also like
- Description and Operating Instructions: Multicharger 750 12V/40A 24V/20A 36V/15ADocument34 pagesDescription and Operating Instructions: Multicharger 750 12V/40A 24V/20A 36V/15APablo Barboza0% (1)
- Mechanical Vibration Lab ReportDocument7 pagesMechanical Vibration Lab ReportChris NichollsNo ratings yet
- Design of Machinery: Chapter 1 Introduction SummaryDocument9 pagesDesign of Machinery: Chapter 1 Introduction SummaryJulianSamayoa100% (2)
- Anna University Mechanical Vibraction Question PaperDocument4 pagesAnna University Mechanical Vibraction Question PaperAnand Ras100% (1)
- Mechanical VibrationsDocument3 pagesMechanical Vibrationskhaerul_naimNo ratings yet
- Solutions Manual Theory of Machine and MDocument8 pagesSolutions Manual Theory of Machine and MAhmet Yüksel ToprakNo ratings yet
- Piezoelectric Actuators: Vector Control Method: Basic, Modeling and Mechatronic Design of Ultrasonic DevicesFrom EverandPiezoelectric Actuators: Vector Control Method: Basic, Modeling and Mechatronic Design of Ultrasonic DevicesNo ratings yet
- A Teachers' Journey: Phenomenological Study On The Puritive Behavioral Standards of Students With Broken FamilyDocument11 pagesA Teachers' Journey: Phenomenological Study On The Puritive Behavioral Standards of Students With Broken FamilyNova Ariston100% (2)
- Mechanical Vibration 2 Marks Questions With Answer: 1. What Is Meant by Vibrations?Document5 pagesMechanical Vibration 2 Marks Questions With Answer: 1. What Is Meant by Vibrations?Mahendra PathakNo ratings yet
- Mechanical Vibration Lab ManualDocument22 pagesMechanical Vibration Lab Manualp07ip710No ratings yet
- Vibration LabDocument38 pagesVibration Labtinkusk24No ratings yet
- Dom 2 Marks All UnitsDocument33 pagesDom 2 Marks All Unitsbhuvansparks100% (2)
- Unit 4Document39 pagesUnit 4rajashekar reddy nallalaNo ratings yet
- Design Project of ShaftDocument37 pagesDesign Project of Shaftniranjanbmazire100% (1)
- Noise and Vibrations Question BankDocument19 pagesNoise and Vibrations Question BankAbhijit DakareNo ratings yet
- SOM 2 MarksDocument8 pagesSOM 2 MarksSiva ShanmugamNo ratings yet
- Design For Fatigue and Simulation of Glass Fibre Epoxy Composite Automobile Leaf SpringDocument22 pagesDesign For Fatigue and Simulation of Glass Fibre Epoxy Composite Automobile Leaf SpringjonNo ratings yet
- Bifilar SuspensionDocument2 pagesBifilar Suspensiongavin_d265No ratings yet
- Som Part B CDocument16 pagesSom Part B CSrini VasanNo ratings yet
- Mechanics of Machinery 2 - Balancing of Rotating MassesDocument11 pagesMechanics of Machinery 2 - Balancing of Rotating MassesAhmed Zawad ShovonNo ratings yet
- Design and Analysis of Crankshaft With Different CompositeDocument9 pagesDesign and Analysis of Crankshaft With Different CompositeSAI CHARANNo ratings yet
- Mechanical Vibrations QuestionDocument1 pageMechanical Vibrations QuestionFadi W MoussaNo ratings yet
- Dynamics of Machinery Oral Question BankDocument22 pagesDynamics of Machinery Oral Question BankSurajKahateRajputNo ratings yet
- 27-11 Mechanical Vibration (ME)Document3 pages27-11 Mechanical Vibration (ME)Mahir MahmoodNo ratings yet
- Midterm VibrationsDocument18 pagesMidterm VibrationsAravind KumarNo ratings yet
- Gear Force & StressDocument30 pagesGear Force & StressRanjeethkumar JalalNo ratings yet
- SOM NOTES (Httpelearning - Vtu.ac - inp1CV331ReloadContentPreview - HTM)Document13 pagesSOM NOTES (Httpelearning - Vtu.ac - inp1CV331ReloadContentPreview - HTM)Vinod Kumar VermaNo ratings yet
- MCQ DomDocument27 pagesMCQ DomLa LiNo ratings yet
- Module 2 Previous Year QuestionsDocument9 pagesModule 2 Previous Year QuestionsnikhilasoknNo ratings yet
- DampingDocument20 pagesDampingjudeekene_403330720100% (1)
- 15mel68 - Cama LabDocument121 pages15mel68 - Cama LabDr-Nagvendra Kumar Kanoje0% (1)
- 1-Basic ConceptsDocument47 pages1-Basic Conceptsjaved hussainNo ratings yet
- Basic Terminology in VibrationsDocument10 pagesBasic Terminology in VibrationsJuhi Singh100% (1)
- Theory of MachineDocument21 pagesTheory of MachineVaibhav Vithoba NaikNo ratings yet
- Mechanical Vibration NotesDocument56 pagesMechanical Vibration NotesYadanaNo ratings yet
- Me6503 Dme Unit 5 Study Notes 2015Document25 pagesMe6503 Dme Unit 5 Study Notes 2015Bala MuruganNo ratings yet
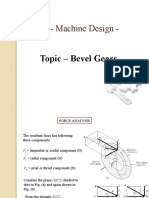
- Bevel Gear - Force Analysis of Bevel GearDocument16 pagesBevel Gear - Force Analysis of Bevel GearRohit GhulanavarNo ratings yet
- KDM 6Document54 pagesKDM 6KarthikeyanRamanujamNo ratings yet
- Unit-5 - Balancing of Reciprocating MassesDocument83 pagesUnit-5 - Balancing of Reciprocating MassesHareesha N GNo ratings yet
- Unit 1 - Mechanical Vibration - WWW - Rgpvnotes.inDocument11 pagesUnit 1 - Mechanical Vibration - WWW - Rgpvnotes.inKamlesh PatelNo ratings yet
- Dynamics and Vibrations - Notes - Free Undamped VibrationsDocument14 pagesDynamics and Vibrations - Notes - Free Undamped VibrationsPhatechand NaikNo ratings yet
- Finite Element Analysis MCQDocument13 pagesFinite Element Analysis MCQShiva KarthikeyanNo ratings yet
- LAB Manual FEADocument246 pagesLAB Manual FEARajkumar MNo ratings yet
- Engg Sol ManualDocument133 pagesEngg Sol Manualmiddieman147100% (6)
- Design and Stress Analysis of Crankshaft For 4 Stroke Diesel EngineDocument17 pagesDesign and Stress Analysis of Crankshaft For 4 Stroke Diesel EngineSIDDH BHOSALE100% (3)
- Kinematics and Dynamics of Machinery Lab ManualDocument63 pagesKinematics and Dynamics of Machinery Lab ManualsaranNo ratings yet
- Ansys Lab ManualDocument87 pagesAnsys Lab Manualaravind174No ratings yet
- ME 6505 - Dynamics of Machines: Fifth Semester Mechanical Engineering (RegulationsDocument18 pagesME 6505 - Dynamics of Machines: Fifth Semester Mechanical Engineering (RegulationsshivendrakumarNo ratings yet
- Unit I DME II Spur Gears by Sachin DhavaneDocument63 pagesUnit I DME II Spur Gears by Sachin DhavaneSachiin Dhavane100% (1)
- c3 ANSYS TutorialsDocument107 pagesc3 ANSYS TutorialsMark Dominic KipkorirNo ratings yet
- Thermodynamics: Strain Gauge ExperimentDocument6 pagesThermodynamics: Strain Gauge ExperimentJeromeClintonNo ratings yet
- 50998335YG1M - Design of Machine Elements - II - Solution ManualDocument80 pages50998335YG1M - Design of Machine Elements - II - Solution ManualKetan V. JoshiNo ratings yet
- Module 5 Balancing of Rotating Masses NM RepairedDocument25 pagesModule 5 Balancing of Rotating Masses NM RepairedRuchindra KumarNo ratings yet
- OBJECTIVE: To Measure The Bending Moment at A: Normal Section of A Loaded Beam and To Check Its Agreement With TheoryDocument1 pageOBJECTIVE: To Measure The Bending Moment at A: Normal Section of A Loaded Beam and To Check Its Agreement With TheoryTarique AhmedNo ratings yet
- Important QuestionsDocument8 pagesImportant QuestionsdineshbabuNo ratings yet
- Unit 5 Balancing of Reciprocating MassesDocument43 pagesUnit 5 Balancing of Reciprocating MassesNAVEENNo ratings yet
- Assignment (1) Vibrations: Submitted ToDocument11 pagesAssignment (1) Vibrations: Submitted ToMahmoud KassabNo ratings yet
- CE8395 Strength of Materials For Mechanical Engineers Questions and AnswersDocument49 pagesCE8395 Strength of Materials For Mechanical Engineers Questions and Answersvijayan RNo ratings yet
- CAE Lab ManualDocument30 pagesCAE Lab Manualsyampnaidu100% (1)
- The Torsional OscillatorDocument4 pagesThe Torsional OscillatorAlex McGintyNo ratings yet
- Vibration MeasurementDocument23 pagesVibration MeasurementAxenta100% (2)
- The Body Shop Case Analysis. The Challenges of Managing Business As Holistic ConfigurationDocument28 pagesThe Body Shop Case Analysis. The Challenges of Managing Business As Holistic ConfigurationHanna AbejoNo ratings yet
- Ti05001 PDFDocument1 pageTi05001 PDFanggieNo ratings yet
- Sales Forecast Template DownloadDocument9 pagesSales Forecast Template DownloadAshokNo ratings yet
- Strategic Marketing: The University of Lahore (Islamabad Campus)Document3 pagesStrategic Marketing: The University of Lahore (Islamabad Campus)Sumaira IrshadNo ratings yet
- Aribah Ahmed CertificateDocument2 pagesAribah Ahmed CertificateBahadur AliNo ratings yet
- EP001 LifeCoachSchoolTranscriptDocument13 pagesEP001 LifeCoachSchoolTranscriptVan GuedesNo ratings yet
- Operations Management Interim ProjectDocument4 pagesOperations Management Interim ProjectABAYANKAR SRIRAM (RA1931201020042)No ratings yet
- Eapp Melc 12Document31 pagesEapp Melc 12Christian Joseph HerreraNo ratings yet
- Low Voltage Switchgear Specification: 1. ScopeDocument6 pagesLow Voltage Switchgear Specification: 1. ScopejendrikoNo ratings yet
- SecurityFund PPT 1.1Document13 pagesSecurityFund PPT 1.1Fmunoz MunozNo ratings yet
- Summative Reflection CommDocument5 pagesSummative Reflection Commapi-546460750No ratings yet
- MCQ Floyd ElexDocument87 pagesMCQ Floyd ElexnicoleNo ratings yet
- 2023 Teacher Email ListDocument5 pages2023 Teacher Email ListmunazamfbsNo ratings yet
- Roles and Responsibilities of An InstructorDocument4 pagesRoles and Responsibilities of An InstructorMohanlal SainiNo ratings yet
- Introduction To HDLDocument28 pagesIntroduction To HDLBack UpNo ratings yet
- 1.co - Deb4113 - Industrial ManagementDocument10 pages1.co - Deb4113 - Industrial ManagementrohaizadNo ratings yet
- ABI TM 13 16 SL - EngDocument1 pageABI TM 13 16 SL - EngJuan Carlos Benitez MartinezNo ratings yet
- RN42Document26 pagesRN42tenminute1000No ratings yet
- Past Simple Vs Past ContinuousDocument3 pagesPast Simple Vs Past ContinuousNatalia SalinasNo ratings yet
- Pedagogy MCQS 03Document54 pagesPedagogy MCQS 03Nawab Ali MalikNo ratings yet
- KundaliniDocument3 pagesKundaliniAlfred IDunnoNo ratings yet
- Benedict Anderson, Imagined CommunitiesDocument2 pagesBenedict Anderson, Imagined CommunitiesMonir Amine0% (1)
- UAV Design TrainingDocument17 pagesUAV Design TrainingPritam AshutoshNo ratings yet
- Xtype Power Train DTC SummariesDocument53 pagesXtype Power Train DTC Summariescardude45750No ratings yet
- Rotating Equipment & ServiceDocument12 pagesRotating Equipment & Servicenurkasih119No ratings yet
- KCG-2001I Service ManualDocument5 pagesKCG-2001I Service ManualPatrick BouffardNo ratings yet
- Truss-Design 18mDocument6 pagesTruss-Design 18mARSENo ratings yet
- Notice: Premerger Notification Waiting Periods Early TerminationsDocument5 pagesNotice: Premerger Notification Waiting Periods Early TerminationsJustia.comNo ratings yet