You might also like
- MCQ For DSPDocument38 pagesMCQ For DSPAnonymous JnvCyu85100% (3)
- A. Digital Signal ProcessingDocument38 pagesA. Digital Signal ProcessingAbhishek PandeyNo ratings yet
- VIGNAN ECE QUESTION BANKDocument15 pagesVIGNAN ECE QUESTION BANKAdnan Zahid67% (3)
- Multiple Choice Questions and Answers On Digital Signal Processing (Part-1)Document12 pagesMultiple Choice Questions and Answers On Digital Signal Processing (Part-1)siva86% (7)
- Choose The Best Answer:: 1. A) B) C) D)Document19 pagesChoose The Best Answer:: 1. A) B) C) D)Basheer NajemNo ratings yet
- UNIT - 7: FIR Filter Design: Dr. Manjunatha. P Professor Dept. of ECEDocument94 pagesUNIT - 7: FIR Filter Design: Dr. Manjunatha. P Professor Dept. of ECEBala MuruganNo ratings yet
- Multiple Choice Questions For Digital Signal ProcessingDocument128 pagesMultiple Choice Questions For Digital Signal Processingpriya100% (2)
- Digital Communication MCQDocument1 pageDigital Communication MCQAmol Ghodake50% (2)
- Laplace Transform & Inverse Laplace Transform MCQDocument22 pagesLaplace Transform & Inverse Laplace Transform MCQShivam Pandey80% (5)
- 1000 Digital Signal Processing MCQsDocument405 pages1000 Digital Signal Processing MCQskibrom atsbha42% (12)
- DSP Lab External QuestionsDocument3 pagesDSP Lab External Questionsharis_j50% (2)
- Analog and Digital Communication Important Questions AnswersDocument21 pagesAnalog and Digital Communication Important Questions AnswersMehboob Khokhar75% (4)
- Digital Signal P Ramesh BabuDocument148 pagesDigital Signal P Ramesh BabuGagan Hy50% (10)
- Soft Computing QuizDocument6 pagesSoft Computing QuizLokesh Ceg100% (2)
- DSP Important Questions Unit-WiseDocument6 pagesDSP Important Questions Unit-WiseRasool Reddy100% (4)
- Digital Circuits and Communication Systems QuizDocument210 pagesDigital Circuits and Communication Systems QuizRakesh VenkatesanNo ratings yet
- DSP Lab Model QuestionsDocument3 pagesDSP Lab Model Questionsannzera0% (1)
- Signals and Systems: An IntroductionDocument5 pagesSignals and Systems: An IntroductionVvek0% (1)
- Questions & Answers On Filters and AttenuatorsDocument42 pagesQuestions & Answers On Filters and Attenuatorskibrom atsbha100% (3)
- MCQDocument12 pagesMCQNancy Cutin100% (2)
- Multiple Choice Questions AntennaDocument22 pagesMultiple Choice Questions AntennaBasheer NajemNo ratings yet
- Questions On Frequency Analysis of Signals and SystemsDocument42 pagesQuestions On Frequency Analysis of Signals and Systemskibrom atsbha100% (1)
- 8051 MCQDocument25 pages8051 MCQRohan Bachhav100% (1)
- Optical Communications: Objective QuestionsDocument13 pagesOptical Communications: Objective QuestionsAllanki Sanyasi RaoNo ratings yet
- Digital Signal Processing Short Question and AnswersDocument32 pagesDigital Signal Processing Short Question and AnswersRachit Nema88% (8)
- SIGNALS & SYSTEMS Objective Questions PDFDocument21 pagesSIGNALS & SYSTEMS Objective Questions PDFMukesh Sharma100% (2)
- Part - Iii Adaptive Filters: DFD - MCQ Question BankDocument4 pagesPart - Iii Adaptive Filters: DFD - MCQ Question BankAshirbad Nayak100% (2)
- 5 - Multiplexing MCQ QuestionsDocument17 pages5 - Multiplexing MCQ QuestionsMohamed Alfarash0% (1)
- DLD McqsDocument36 pagesDLD Mcqspunjabiangem100% (2)
- MCQ Questions Analog Circuits (EC-405)Document15 pagesMCQ Questions Analog Circuits (EC-405)Ankit KapoorNo ratings yet
- Radar Systems Important QuestionsDocument3 pagesRadar Systems Important QuestionsJanardhan Ch100% (1)
- Unit 3 Fourier Series & Coefficients Questions and Answers - Sanfoundry PDFDocument3 pagesUnit 3 Fourier Series & Coefficients Questions and Answers - Sanfoundry PDFzohaibNo ratings yet
- ECE 220 Objective Questions and Answers PDFDocument37 pagesECE 220 Objective Questions and Answers PDFVenkatesh TatikondaNo ratings yet
- MCQ On Digital Signal ProcessingDocument3 pagesMCQ On Digital Signal ProcessingIra MinochaNo ratings yet
- Chapter 5: Pulse Code Modulation: Section 5.9Document12 pagesChapter 5: Pulse Code Modulation: Section 5.9Srividhya Selvakumar100% (5)
- Digital Communications Questions and AnswersDocument2 pagesDigital Communications Questions and AnswersRuby Manauis100% (1)
- Antenna & Wave Propagation MCQDocument38 pagesAntenna & Wave Propagation MCQMd Siraj Uddin100% (1)
- DSP Digital Filters Finite Word Length EffectsDocument3 pagesDSP Digital Filters Finite Word Length Effectstamizhanps67% (3)
- Dip McqsDocument21 pagesDip McqsSonalNo ratings yet
- MPMC MCQDocument9 pagesMPMC MCQDhivyaManian83% (6)
- This Set of VLSI Multiple Choice QuestionsDocument20 pagesThis Set of VLSI Multiple Choice QuestionsSujith Mrinal100% (3)
- Questions & Answers On Discrete Time Signals and SystemsDocument26 pagesQuestions & Answers On Discrete Time Signals and Systemskibrom atsbhaNo ratings yet
- Linear Integrated Circuits Lab Viva VoceDocument8 pagesLinear Integrated Circuits Lab Viva Voceselvi0412100% (12)
- MCQ-WCN 2 SDocument32 pagesMCQ-WCN 2 SM.Ganesh Kumar mahendrakar100% (1)
- Electronic Switching Unit - I (MCQ) : AnswerDocument18 pagesElectronic Switching Unit - I (MCQ) : Answershivam yadavNo ratings yet
- M3 MIII Unit 4 MCQDocument9 pagesM3 MIII Unit 4 MCQAbhay mane88% (8)
- AWP Unit Wise Question BankDocument8 pagesAWP Unit Wise Question Bankganesh4u_p100% (1)
- 2 MarksDocument2 pages2 MarksEzhilya VenkatNo ratings yet
- Linear Integrated Circuit Questions and AnswersDocument22 pagesLinear Integrated Circuit Questions and Answerselakya79% (24)
- DSP Lab Sample Viva QuestionsDocument10 pagesDSP Lab Sample Viva QuestionsManish NarkhedeNo ratings yet
- Signals and Systems FundamentalsDocument8 pagesSignals and Systems Fundamentalsaishwarya100% (2)
- Microwave Multiple Choice QuestionsDocument25 pagesMicrowave Multiple Choice QuestionsGerard Guangco40% (5)
- MCQ For DSP: December 2013Document39 pagesMCQ For DSP: December 2013Zainab FaydhNo ratings yet
- DSP Objective QuestionsDocument3 pagesDSP Objective Questionsannam karthikNo ratings yet
- DSP MCQ1Document8 pagesDSP MCQ1Bala MuruganNo ratings yet
- DigiCom NotesDocument25 pagesDigiCom NotesJoseph Victor Oppus BaquialNo ratings yet
- Composition ct2Document25 pagesComposition ct2Sangam MishraNo ratings yet
- Assignment 10 Solutions - UpdatedDocument7 pagesAssignment 10 Solutions - UpdatedbaluNo ratings yet
- UNIT 3 DIGITAL COMMUNCATION R2017 MCQ FinalDocument9 pagesUNIT 3 DIGITAL COMMUNCATION R2017 MCQ FinalMuthumariNo ratings yet
- Software Radio: Sampling Rate Selection, Design and SynchronizationFrom EverandSoftware Radio: Sampling Rate Selection, Design and SynchronizationNo ratings yet
- Iecx UpdatedDocument16 pagesIecx Updatedalkesh.engNo ratings yet
- Atex GuidelinesDocument76 pagesAtex GuidelinesAN.ADAMMSNo ratings yet
- Info Iec60364-4-41 (Ed5.0) en DDocument7 pagesInfo Iec60364-4-41 (Ed5.0) en Dalkesh.engNo ratings yet
- Gujarat Technological UniversityDocument2 pagesGujarat Technological Universityalkesh.engNo ratings yet
- IEC60598 1 MarkingDocument6 pagesIEC60598 1 Markingalkesh.engNo ratings yet
- Samarth Colleges of Engineering and Technology, HimmatnagarDocument1 pageSamarth Colleges of Engineering and Technology, Himmatnagaralkesh.engNo ratings yet
- Hotel Details Near Gujarat CollegeDocument2 pagesHotel Details Near Gujarat Collegealkesh.engNo ratings yet
- CISPR 24 - Ed.2.0 - 2010 - EQL - 2016-07-01Document2 pagesCISPR 24 - Ed.2.0 - 2010 - EQL - 2016-07-01alkesh.engNo ratings yet
- (A) Wire Colour Identification (Iec 60204-1) : Prima Automation (I) Pvt. LTDDocument2 pages(A) Wire Colour Identification (Iec 60204-1) : Prima Automation (I) Pvt. LTDalkesh.engNo ratings yet
- Guj PoemDocument1 pageGuj Poemalkesh.engNo ratings yet
- Samarth College Academic Calendar 2015-16Document1 pageSamarth College Academic Calendar 2015-16alkesh.engNo ratings yet
- Samarth College Academic Calendar 2015-16Document1 pageSamarth College Academic Calendar 2015-16alkesh.engNo ratings yet
- Lecture 1423813824Document74 pagesLecture 1423813824alkesh.engNo ratings yet
- EE340 Manual 061Document46 pagesEE340 Manual 061haha2012No ratings yet
- MW QuestionsDocument6 pagesMW Questionsalkesh.engNo ratings yet
- Gujarat Technological UniversityDocument3 pagesGujarat Technological Universityalkesh.engNo ratings yet
- MW QuestionsDocument6 pagesMW Questionsalkesh.engNo ratings yet
- Intro Sci LabDocument87 pagesIntro Sci LabandysarmientoNo ratings yet
- Vector Magnetic Potential of a Small Loop AntennaDocument12 pagesVector Magnetic Potential of a Small Loop Antennaalkesh.eng100% (1)
- Essential Guide to Satellite CommunicationDocument60 pagesEssential Guide to Satellite CommunicationKevin Hefayana Putra100% (1)
- Mpi 11002Document21 pagesMpi 11002alkesh.eng0% (1)
- Satcom 2 PDFDocument10 pagesSatcom 2 PDFalkesh.engNo ratings yet
- Mpi Assignment Solution3Document25 pagesMpi Assignment Solution3alkesh.engNo ratings yet
- Essential Guide to Satellite CommunicationDocument60 pagesEssential Guide to Satellite CommunicationKevin Hefayana Putra100% (1)
- 2141001Document2 pages2141001alkesh.engNo ratings yet
- Lecture 1Document9 pagesLecture 1NikhilDamodaranNo ratings yet
- Satellite Communication Lab PDFDocument2 pagesSatellite Communication Lab PDFalkesh.engNo ratings yet
- Mpi Assignment Solution2Document22 pagesMpi Assignment Solution2alkesh.engNo ratings yet
- Mpi Assignment Solution1Document15 pagesMpi Assignment Solution1alkesh.eng0% (1)
- Mutable Checkpoint-Restart Automating Li PDFDocument12 pagesMutable Checkpoint-Restart Automating Li PDFhectorjazzNo ratings yet
- Attach-3 Functional Design Specification (FDS)Document41 pagesAttach-3 Functional Design Specification (FDS)Anandharaja RajamohanNo ratings yet
- Lighthouse Report Viewer - 8Document6 pagesLighthouse Report Viewer - 8oh hayoungNo ratings yet
- Beagle Board XM Reference ManualDocument164 pagesBeagle Board XM Reference Manualmhenryk1No ratings yet
- Manual TIC ControllerDocument40 pagesManual TIC ControllerSölangs QüntellaNo ratings yet
- Stephen Yu: EducationDocument1 pageStephen Yu: EducationAnonymous PKxguZgoNo ratings yet
- WebPOS 3rd Party Integration Tool (W3P)Document37 pagesWebPOS 3rd Party Integration Tool (W3P)Guntur KsNo ratings yet
- Grade 10 Employability Skill Unit 3 Bookback & Additional McqsDocument22 pagesGrade 10 Employability Skill Unit 3 Bookback & Additional McqsTamil ArasiNo ratings yet
- NRG Wind Data Retriever Software Manual For NRG Wind Explorer LoggerDocument7 pagesNRG Wind Data Retriever Software Manual For NRG Wind Explorer LoggerjimvillNo ratings yet
- DSQFM TRX 2Document6 pagesDSQFM TRX 2Alex HillNo ratings yet
- ThinkPad T450s Platform SpecificationsDocument1 pageThinkPad T450s Platform SpecificationsisraelmpNo ratings yet
- Solo Ibs EngDocument4 pagesSolo Ibs Engb.ljubisaNo ratings yet
- Components OverviewDocument112 pagesComponents OverviewJorge MezaNo ratings yet
- Lab 5 DSPDocument11 pagesLab 5 DSPzubair tahirNo ratings yet
- ThingPark Wireless - Logger GUI User GuideDocument12 pagesThingPark Wireless - Logger GUI User GuideOfer KrausNo ratings yet
- Jai Tax Determination PackageDocument565 pagesJai Tax Determination PackageThivanNo ratings yet
- Super Series Digital Torque Wrenches Technical SpecificationDocument3 pagesSuper Series Digital Torque Wrenches Technical SpecificationJulian Andrés Garcia SánchezNo ratings yet
- Yet Another Haskell TutorialDocument192 pagesYet Another Haskell TutorialfembemNo ratings yet
- IBM TotalStorage Virtual Tape Server Implementation and PlanningDocument344 pagesIBM TotalStorage Virtual Tape Server Implementation and PlanningsenrameshNo ratings yet
- Linux Kernel PDFDocument43 pagesLinux Kernel PDFFelixNo ratings yet
- Berkeley Socket API - I: Unit 01.03.01 CS 5220: Computer CommunicationsDocument17 pagesBerkeley Socket API - I: Unit 01.03.01 CS 5220: Computer CommunicationsViswanath KalannagariNo ratings yet
- .Soldier Health and Position Tracking SystemDocument4 pages.Soldier Health and Position Tracking SystemVarunNo ratings yet
- Wi - Fi Control Robot Using Node MCU: January 2018Document5 pagesWi - Fi Control Robot Using Node MCU: January 2018NayaaNo ratings yet
- Usb Cam LogDocument3 pagesUsb Cam LogTribhubaneshwar DasNo ratings yet
- DataFlex 3.2 Installation and Environment GuideDocument37 pagesDataFlex 3.2 Installation and Environment GuideCrossyde Kudu AdukaboNo ratings yet
- Vendor: Microsoft Exam Code: AZ-104 Exam Name: Microsoft Azure Administrator Version: DEMODocument7 pagesVendor: Microsoft Exam Code: AZ-104 Exam Name: Microsoft Azure Administrator Version: DEMOAyaanNo ratings yet
- Echodrive 22m1a PDFDocument2 pagesEchodrive 22m1a PDFJhon ConstantineNo ratings yet
- PDFTron PDF2Text User ManualDocument21 pagesPDFTron PDF2Text User ManualTuấn MinhNo ratings yet
- Spoliation Letter Ed RequestDocument5 pagesSpoliation Letter Ed RequestRick AlbrittonNo ratings yet
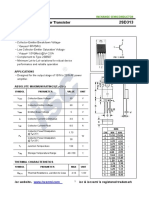
- 2SD313 60V NPN Power TransistorDocument2 pages2SD313 60V NPN Power TransistorSunu HerryNo ratings yet