You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- A330 General FamiliarisationDocument146 pagesA330 General Familiarisationlinchienchung100% (22)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- ED - T.flight Hotas X Crab Setup v5.36Document1 pageED - T.flight Hotas X Crab Setup v5.36mrTemp100% (2)
- Learjet 35 Learjet3 05 ExnormDocument92 pagesLearjet 35 Learjet3 05 ExnormJose Ariel ChejanovichNo ratings yet
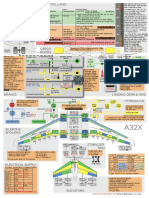
- A320 Hyd PDFDocument1 pageA320 Hyd PDFkpil100% (1)
- UAV Project PpuavDocument22 pagesUAV Project PpuavAhmedNo ratings yet
- UAV ProjectDocument21 pagesUAV ProjectAhmedNo ratings yet
- Fuselagem DesignDocument125 pagesFuselagem DesignAhmedNo ratings yet
- Ordinary Differential Equations Integrating FactorDocument28 pagesOrdinary Differential Equations Integrating Factorh_2_3No ratings yet
- Ordinary Differential Equations Integrating FactorDocument28 pagesOrdinary Differential Equations Integrating Factorh_2_3No ratings yet
- Flight DynamicsDocument49 pagesFlight DynamicsVũ Huy MừngNo ratings yet
- Airbus 29 A300 A310 HydraulicsDocument186 pagesAirbus 29 A300 A310 HydraulicsElijah Paul Merto100% (6)
- POF Question Bank PDFDocument88 pagesPOF Question Bank PDFDilakshi Randeniya100% (2)
- 2018 Precision Flight Controls Inc. Product CatalogDocument17 pages2018 Precision Flight Controls Inc. Product CatalogrubiodegoNo ratings yet
- (Lua) Advanced Aerial AI Documentation, Version 4.2 - PastebinDocument5 pages(Lua) Advanced Aerial AI Documentation, Version 4.2 - PastebinLarasmoyo NugrohoNo ratings yet
- Airport Planning and Design by Sunil Khyaju SirDocument112 pagesAirport Planning and Design by Sunil Khyaju SirAmrit Rawat ChetriiNo ratings yet
- Module 1 Introduction To FlightDocument45 pagesModule 1 Introduction To FlightAdams Ahmadu100% (2)
- User Manual For Teraranger Tower Evo: Hardware Revision 1.0 Firmware Revision 1.1.1Document27 pagesUser Manual For Teraranger Tower Evo: Hardware Revision 1.0 Firmware Revision 1.1.1Victor CuadraNo ratings yet
- LR35 FlashcardsDocument240 pagesLR35 FlashcardsLuan SchumacherNo ratings yet
- Controls - Keyboard Commands For MSFSDocument1 pageControls - Keyboard Commands For MSFSChris Quenta100% (2)
- Assignment 1 & 2Document9 pagesAssignment 1 & 2ashimaNo ratings yet
- TUTORIAL Xflr5 TutorialDocument71 pagesTUTORIAL Xflr5 TutorialMarco Aurélio Leonel MatunagaNo ratings yet
- NX3 Evo Flight Controller System Manual: Very Important!Document2 pagesNX3 Evo Flight Controller System Manual: Very Important!HirenNo ratings yet
- Jet Blue PDF ModuleDocument53 pagesJet Blue PDF ModuleMURALINo ratings yet
- Ocs Lab Anoud Reem AircraftPitch SlidesDocument33 pagesOcs Lab Anoud Reem AircraftPitch SlidesEng Mohammed NsourNo ratings yet
- X-Plane Quickstart Guide EngDocument20 pagesX-Plane Quickstart Guide EngmacmontyNo ratings yet
- b787 Study Guide 26may2017Document50 pagesb787 Study Guide 26may2017Nabil KhurshidNo ratings yet
- HURC MultiWii SE v2 Quick-Start Guide-8.5.13Document6 pagesHURC MultiWii SE v2 Quick-Start Guide-8.5.13Jorge_Luiz_4564No ratings yet
- Compact Robot Optimized For Painting: Key BenefitsDocument2 pagesCompact Robot Optimized For Painting: Key BenefitshemnathavlsigmailcomNo ratings yet
- Purpose: Determine Best Practice For Store SeparationDocument4 pagesPurpose: Determine Best Practice For Store SeparationwajahatNo ratings yet
- Pack-A-Plane: Designing A Compact RC Aircraft For Rapid DeploymentDocument16 pagesPack-A-Plane: Designing A Compact RC Aircraft For Rapid DeploymentBartłomiej BurlagaNo ratings yet
- The Gyroscope in Aeronautics: An Explanation of Principles and of Effects-Useful and OtherwiseDocument1 pageThe Gyroscope in Aeronautics: An Explanation of Principles and of Effects-Useful and Otherwisehamza tayyabNo ratings yet
- ATPL Inst 6.2 PDFDocument20 pagesATPL Inst 6.2 PDFKoustubh VadalkarNo ratings yet
- Student Training Guide - RPL - VER 4Document17 pagesStudent Training Guide - RPL - VER 4Batza BatsakisNo ratings yet
- 1942 - The Pacific Air War - Pilots Handbook - PCDocument82 pages1942 - The Pacific Air War - Pilots Handbook - PCAndrew FultonNo ratings yet
- Consolidated Version CS-22 Amdt 2 PDFDocument121 pagesConsolidated Version CS-22 Amdt 2 PDFDiego AcostaNo ratings yet