You might also like
- QAQC Electrical Inspection: A Beginner's GuideFrom EverandQAQC Electrical Inspection: A Beginner's GuideRating: 4 out of 5 stars4/5 (1)
- Chapter 17 - NT PWC SDM Substation Layouts and Facilities - Outdoor Section Rev 2 - 17-1-2012Document12 pagesChapter 17 - NT PWC SDM Substation Layouts and Facilities - Outdoor Section Rev 2 - 17-1-2012Punit RatnaniNo ratings yet
- Detecting The Fault Location Using Traveling WaveDocument4 pagesDetecting The Fault Location Using Traveling WaveSuginoMarwotoNo ratings yet
- Transmission Line Transposition On ATPDrawDocument4 pagesTransmission Line Transposition On ATPDrawRogerio Lucena100% (1)
- Calculation of Transmission Line Parameters From Synchronized MeasurementsDocument12 pagesCalculation of Transmission Line Parameters From Synchronized Measurementswvargas926100% (1)
- Sem Hand BookDocument118 pagesSem Hand BookrajuwithualwaysNo ratings yet
- Lecture Note: Insulation CoordinationDocument8 pagesLecture Note: Insulation CoordinationMehmet Efe OzbekNo ratings yet
- FerrantiDocument5 pagesFerrantiPratik RanjanNo ratings yet
- A Simplified Method For Short Circuit Calculations in LV Radial NetworksDocument3 pagesA Simplified Method For Short Circuit Calculations in LV Radial NetworkscheeseNcrackersNo ratings yet
- Design of 230 KV Twin Bundle Double Circuit Overhead Transmission LineDocument4 pagesDesign of 230 KV Twin Bundle Double Circuit Overhead Transmission LineEditor IJTSRDNo ratings yet
- PGCIL ET Salary in Hand, Structure & Allowances - OlxamDocument3 pagesPGCIL ET Salary in Hand, Structure & Allowances - OlxamAravindanNo ratings yet
- Pages From Electrical Transmission and Distribution Reference Book of WestinghouseDocument4 pagesPages From Electrical Transmission and Distribution Reference Book of WestinghousesparkCENo ratings yet
- To Check The Reliability of Different Power Sources and Bus Bar Schemes Using EtapDocument83 pagesTo Check The Reliability of Different Power Sources and Bus Bar Schemes Using EtapMuhammad MudassarNo ratings yet
- A Practical Method For Load Balancing in The LV Distribution Networks Case Study Tabriz Electrical NetworkDocument6 pagesA Practical Method For Load Balancing in The LV Distribution Networks Case Study Tabriz Electrical NetworkTanaka MasochaNo ratings yet
- Technical Specification: (Maker'S List)Document8 pagesTechnical Specification: (Maker'S List)RAPRATSINNo ratings yet
- MS Thesis Final of Ubaid Ur Rehman "Post National Grid Reinforcement Analysis of QESCO Network For Reliable and Optimal Operation"Document76 pagesMS Thesis Final of Ubaid Ur Rehman "Post National Grid Reinforcement Analysis of QESCO Network For Reliable and Optimal Operation"ubaidNo ratings yet
- How To Make SAG Template For Tower Spotting 1Document6 pagesHow To Make SAG Template For Tower Spotting 1Baris AybarsNo ratings yet
- Project Report On HVDC Transmission LineDocument70 pagesProject Report On HVDC Transmission LineLuis Carlos KinnNo ratings yet
- Design of Transmission Tower For A Sub Station of 132 KVDocument11 pagesDesign of Transmission Tower For A Sub Station of 132 KVIJRASETPublicationsNo ratings yet
- Cable Impedance Calculations - Open ElectricalDocument4 pagesCable Impedance Calculations - Open Electricaludayakumart100% (1)
- Specification For Power System Analysis SoftwareDocument4 pagesSpecification For Power System Analysis SoftwareTaniguevelane DjenarthananeNo ratings yet
- Insulation Coordination of Ultra High VoDocument38 pagesInsulation Coordination of Ultra High Voupenderaits100% (1)
- Inspections and Tests For GISDocument16 pagesInspections and Tests For GISsanjay sharmaNo ratings yet
- NEP TransDocument347 pagesNEP TransVeera Bramham0% (1)
- 26 Weeks PGDC T&D-3rd BatchDocument8 pages26 Weeks PGDC T&D-3rd Batchanse1100% (1)
- 500 KV TRANSMISSION LINE DESIGN AND FAULT ANALYSISDocument96 pages500 KV TRANSMISSION LINE DESIGN AND FAULT ANALYSISkariboo karibooxNo ratings yet
- EMTP - RV - IC-part2 Tower Foot ResistanceDocument19 pagesEMTP - RV - IC-part2 Tower Foot ResistanceRaja Shekar NalluriNo ratings yet
- ACSR Some Equal Standards-Indian StandardDocument20 pagesACSR Some Equal Standards-Indian StandardHabib EmamiNo ratings yet
- AaPower System AnalysisDocument79 pagesAaPower System AnalysisFlash LightNo ratings yet
- Introduction of Electric Power Transmission and DistributionDocument100 pagesIntroduction of Electric Power Transmission and DistributionUmair BeygNo ratings yet
- Unit-I Transmission Line Parameters: Conductor MaterialsDocument53 pagesUnit-I Transmission Line Parameters: Conductor Materialsirshad224No ratings yet
- IEEE Guide For The Protection of Shunt Reactors: IEEE Power Engineering SocietyDocument39 pagesIEEE Guide For The Protection of Shunt Reactors: IEEE Power Engineering Societyruben alejandro TeranNo ratings yet
- Analysis of Substation ReliabilityDocument5 pagesAnalysis of Substation ReliabilityCarlos KleberNo ratings yet
- Mechanical Design of Transmission LineDocument45 pagesMechanical Design of Transmission LineBilal Ahmad0% (1)
- Specification For Earthing TransformersDocument8 pagesSpecification For Earthing Transformerskarthikeyan257No ratings yet
- Design of 150 MWDocument21 pagesDesign of 150 MWSishir ChettriNo ratings yet
- Sandeep Dixit: Understanding Load Dispatch-Abt-Grid Code-Standards InterplayDocument50 pagesSandeep Dixit: Understanding Load Dispatch-Abt-Grid Code-Standards Interplayvikas_nptiNo ratings yet
- Energy Audit of A 400-220 KV Substation - A Case Study PDFDocument8 pagesEnergy Audit of A 400-220 KV Substation - A Case Study PDFRajuNo ratings yet
- Supply of PLCC Panel With Dual 19 Inch Rack of ETL 41 TYPE CDocument19 pagesSupply of PLCC Panel With Dual 19 Inch Rack of ETL 41 TYPE CArbab AslamNo ratings yet
- Transmission Line Conductors, AssignmentDocument9 pagesTransmission Line Conductors, Assignmentmuhammad_sarwar_27No ratings yet
- Computation of TR Line Parameters & ModellingDocument18 pagesComputation of TR Line Parameters & ModellingVibin NivasNo ratings yet
- Modellinag & Simulation With MiPowerDocument5 pagesModellinag & Simulation With MiPowerAkshay SharmaNo ratings yet
- NucciDocument15 pagesNucciburvanovNo ratings yet
- Sastec2 - Technical Offer - 220kv Gis JSPL - Angul - Rev CDocument18 pagesSastec2 - Technical Offer - 220kv Gis JSPL - Angul - Rev CRakesh Kumar Singh (Phase 1B)No ratings yet
- Different Techniques of Reactive Power CompensationDocument2 pagesDifferent Techniques of Reactive Power CompensationJagdeep Singh0% (1)
- Comparison of Newton Raphson and Gauss Seidel Methods For Power Flow AnalysisDocument7 pagesComparison of Newton Raphson and Gauss Seidel Methods For Power Flow AnalysisMokr AchourNo ratings yet
- 6 RTU Specifications III A 2216Document10 pages6 RTU Specifications III A 2216rasim_m1146No ratings yet
- Tender - 220 KV Ss CriteriaDocument6 pagesTender - 220 KV Ss Criteriajitendra100% (1)
- Transmission Line Zero Seq ReactanceDocument39 pagesTransmission Line Zero Seq ReactanceShyamkant VasekarNo ratings yet
- RTU With Numerical RelaysDocument7 pagesRTU With Numerical RelaysRamu GunaseelanNo ratings yet
- Volume - 2 of 3 - Package-2Document163 pagesVolume - 2 of 3 - Package-2Pranoy BaruaNo ratings yet
- Dynamic Line RatingDocument39 pagesDynamic Line Ratingbocioroaga_marian7333No ratings yet
- Efect of Sag On Transmission LineDocument4 pagesEfect of Sag On Transmission LineGabriel Barriga JaqueNo ratings yet
- HVDC SlidesDocument25 pagesHVDC SlidesAreeb ZulkifleNo ratings yet
- Earthing Design Substation IEEE 80Document2 pagesEarthing Design Substation IEEE 80MELVIN0% (1)
- VSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsFrom EverandVSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsNo ratings yet
- Integration of Green and Renewable Energy in Electric Power SystemsFrom EverandIntegration of Green and Renewable Energy in Electric Power SystemsNo ratings yet
- Model Validation For The August 10, 1996 WSCC System Outage PDFDocument13 pagesModel Validation For The August 10, 1996 WSCC System Outage PDFwvargas926No ratings yet
- A Hybrid Method For Critical Clearing Time Evaluation of Multi-Machine SystemsDocument7 pagesA Hybrid Method For Critical Clearing Time Evaluation of Multi-Machine Systemswvargas926No ratings yet
- Generator Model Validation Using PMU Data For MOD-26, MOD-27 RequirementsDocument34 pagesGenerator Model Validation Using PMU Data For MOD-26, MOD-27 Requirementswvargas926No ratings yet
- On-Line Overhead Transmission Line and Transformer Parameters Identification Based On PMU MeasurementsDocument6 pagesOn-Line Overhead Transmission Line and Transformer Parameters Identification Based On PMU Measurementswvargas926No ratings yet
- Static Analysis For Efficient Affine Arithmetic On GPUsDocument89 pagesStatic Analysis For Efficient Affine Arithmetic On GPUswvargas926No ratings yet
- Modeling Devices With Nonlinear Voltage-Current Characteristics For Harmonic Studies PDFDocument10 pagesModeling Devices With Nonlinear Voltage-Current Characteristics For Harmonic Studies PDFwvargas926No ratings yet
- Modeling and Simulation of The Propagation of Harmonics in Electric Power Networks. I. Concepts, Models, and Simulation TechniquesDocument10 pagesModeling and Simulation of The Propagation of Harmonics in Electric Power Networks. I. Concepts, Models, and Simulation Techniqueswvargas926No ratings yet
- Survey of Harmonics Measurements in Electrical Distribution SystemsDocument7 pagesSurvey of Harmonics Measurements in Electrical Distribution Systemswvargas926No ratings yet
- Image and Vision Computing: Rama ChellappaDocument3 pagesImage and Vision Computing: Rama Chellappawvargas926No ratings yet
- IEEE-IEC Measuring Relays and Protection Equipment Part 24 Common Format For Transient Data Exchange (COMTRADE) For Power SystemsDocument73 pagesIEEE-IEC Measuring Relays and Protection Equipment Part 24 Common Format For Transient Data Exchange (COMTRADE) For Power Systemswvargas926No ratings yet
- Mscthesis Parmar PDFDocument86 pagesMscthesis Parmar PDFwvargas926No ratings yet
- SVC Dynamic Analytical ModelDocument1 pageSVC Dynamic Analytical Modelwvargas926No ratings yet
- A Two Stage Fault Location Algorithm For Locating Faults On Transmission LinesDocument6 pagesA Two Stage Fault Location Algorithm For Locating Faults On Transmission Lineswvargas926No ratings yet
- Detection of Transmission Line Faults Using Discrete Wavelet TransformDocument6 pagesDetection of Transmission Line Faults Using Discrete Wavelet Transformwvargas926No ratings yet
- IDT DAtasheetDocument18 pagesIDT DAtasheetbalajiiconNo ratings yet
- DC 30Document1 pageDC 30Anonymous zE7GEC1mXNo ratings yet
- MEI Cashflow 330Document63 pagesMEI Cashflow 330Miguel SerranoNo ratings yet
- Luminaria Led GE AlbeoDocument6 pagesLuminaria Led GE AlbeoKevin Fernando Mamani BarrientosNo ratings yet
- Diagrama Conexionado CmaDocument3 pagesDiagrama Conexionado CmaDoc_LACNo ratings yet
- TRT 63 ADocument4 pagesTRT 63 AKendall BirjueNo ratings yet
- Mic Wiring DiagramsDocument5 pagesMic Wiring Diagramsum121xNo ratings yet
- Ss 01105Document6 pagesSs 01105Didit AndiatmokoNo ratings yet
- SS 460 400h1uDocument1 pageSS 460 400h1uSonyNo ratings yet
- Assignment 7 CHEM216 1Document2 pagesAssignment 7 CHEM216 1Pranav JainNo ratings yet
- Tronair Rectificadores 50-60Hz PN 11B6653-1000-1010Document65 pagesTronair Rectificadores 50-60Hz PN 11B6653-1000-1010Carlos Alberto Rozo R.100% (1)
- JST CAST COIL BrochureDocument12 pagesJST CAST COIL BrochurekcirrenwodNo ratings yet
- Colour Television: Service ManualDocument34 pagesColour Television: Service ManualAndré LeftNo ratings yet
- Research Bookbind Upd 6Document42 pagesResearch Bookbind Upd 6MattJimuelQuililanNo ratings yet
- Service Manual: Omni Patient MonitorDocument57 pagesService Manual: Omni Patient MonitorJeanfreyNo ratings yet
- CD4047BC Low Power Monostable/Astable Multivibrator: General DescriptionDocument10 pagesCD4047BC Low Power Monostable/Astable Multivibrator: General DescriptionFlavio SilvaNo ratings yet
- Learn Electronics With Basic Theory and Home ExperimentsDocument427 pagesLearn Electronics With Basic Theory and Home ExperimentsAnderson Valderrama Perez50% (2)
- IEEE Std. C57.19.100 - 2012 - Caracteristicas Termicas, Dielétricas e de OperaçãoDocument42 pagesIEEE Std. C57.19.100 - 2012 - Caracteristicas Termicas, Dielétricas e de OperaçãoPedro Coelho100% (1)
- Transistors Question and Answers Doc by PranghiDocument15 pagesTransistors Question and Answers Doc by PranghiPRANGHI80% (10)
- Partial Discharge TestDocument30 pagesPartial Discharge TestSikandar MasoodNo ratings yet
- User Guide E6 LCD RT Evolution - 5-10K W Transfo 05 13 AA 59 206 14 en ESDocument61 pagesUser Guide E6 LCD RT Evolution - 5-10K W Transfo 05 13 AA 59 206 14 en ESqcajesusNo ratings yet
- Electrical Measurements Lab Manual PDFDocument49 pagesElectrical Measurements Lab Manual PDFAnand PrajapatiNo ratings yet
- Product Data Sheet: Tizio BlackDocument2 pagesProduct Data Sheet: Tizio BlackMarinTosicNo ratings yet
- ACAR Nehring USA Data SheetDocument2 pagesACAR Nehring USA Data SheetPM PandianNo ratings yet
- Year 12 Physics - 2014 - NKNKN 2015 - Remote SensingDocument13 pagesYear 12 Physics - 2014 - NKNKN 2015 - Remote SensingRonaldo TangoNo ratings yet
- Estimation of Iron Losses in Induction Motors: Calculation Method, Results, and AnalysisDocument11 pagesEstimation of Iron Losses in Induction Motors: Calculation Method, Results, and AnalysisSuda KrishnarjunaraoNo ratings yet
- Size Reduction of Yagi Uda Antenna by AlDocument12 pagesSize Reduction of Yagi Uda Antenna by AlNguyễn Phùng HiếuNo ratings yet
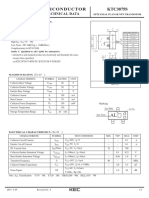
- KEC Semicon KTC3875S Y RTK P - C69744Document4 pagesKEC Semicon KTC3875S Y RTK P - C69744minreyNo ratings yet
- CD 4046Document24 pagesCD 4046Flr DanielNo ratings yet
- 8-Bit, 50 MSPS/80 MSPS/100 MSPS 3 V A/D ConverterDocument12 pages8-Bit, 50 MSPS/80 MSPS/100 MSPS 3 V A/D ConverterZuomanNo ratings yet