Professional Documents
Culture Documents
Tension Structures
Tension Structures
Uploaded by
sertackcdg0 ratings0% found this document useful (0 votes)
20 views217 pagestension structures
Copyright
© © All Rights Reserved
Available Formats
PDF or read online from Scribd
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this Documenttension structures
Copyright:
© All Rights Reserved
Available Formats
Download as PDF or read online from Scribd
0 ratings0% found this document useful (0 votes)
20 views217 pagesTension Structures
Tension Structures
Uploaded by
sertackcdgtension structures
Copyright:
© All Rights Reserved
Available Formats
Download as PDF or read online from Scribd
You are on page 1of 217
NM Tension
structures
Form and behaviour
TA
660 .
C3LU9x W J Lewis
/2003
Davis
Tension Structures
Form and Behaviour
W. J. Lewis
University of Warwick
Graphic Design: A. J. Cartwright, University of Warwick
=
‘L! ThomasTelford
Published by Thomas Telford Puslishing, Thomas Telford Ltd, 1 Heron Quay, London E14 4JD.
www.thomastelford.com
Distributors for Thomas Telford 30oks are
USA: ASCE Press, 1801 Alexander Bell Drive, Reston, VA 20191-4400, USA
Japan: Maruzen Co. Ltd, Book Department, 3-10 Nihonbashi 2-chome, Chuo-ku, Tokyo 103
Australia; DA Books and Journals, 648 Whitehorse Road, Mitcham 3132, Victoria
First published 2003
A catalogue record for this book is available from the British Library
ISBN: 0 7277 3236 6
(© Wanda Lewis 2003
All rights, including translation, reserved. Except as permitted by the Copyright, Designs and
Patents Act 1988, no part of this publication may be reproduced, stored in a retrieval system or
transmitted in any form or by any means, electronic, mechanical, photocopying or otherwise,
without the prior written permission of the Publishing Director, Thomas Telford Publishing,
Thomas Telford Ltd, 1 Heron Quay, London E14 4D.
This book is published on the understanding that the author is solely responsible for the state-
ments made and opinions expressed in it and that its publication does not necessarily imply that
such statements and/or opinions are or reflect the views or opinions of the publishers. While
every effort has been made to ensure that the statements made and the opinions expressed in this
publication provide a safe and accurate guide, no liability or responsibility can be accepted in
this respect by the author or publishers.
‘Typeset by Keyword Publishing Services
Printed and bound in Great Britain by MPG Books, Bodmin
Contents
Preface
Acknowledgements
1
Introduction
1.1 Definitions and classifications
1.1.1 Boundary tensioned membranes
1.1.2. Pneumatic structures
1.1.3. Pre-stressed cable nets and beams
1.2 Design process of tension membranes
1.3 Main features of tension membranes
1.4 Conventional roofing forms versus tension membranes
1.4.1 Common misconceptions relating to tension membrane
design
15 Closing remarks
References
Form-finding
2.1 General concepts. Nature's ‘secrets’
2.2 Concept of a ‘minimal surface’ — historical background
2.3 Form-finding methodologies
2.3.1. Physical models
10
ve
15
17
nig
20
20
23
26
28
iti
Contents
2.3.2 Computational models 29
2.3.3 ‘Soap-film debate’ 31
2.3.4 Form-finding, or form-dictating? 35
References 36
3. Geometrically non-linear behaviour. Solutions by commonly
used numerical methods 39
3.1 Geometric non-linearity 39
3.2. Commonly used computational methods for the analysis
of geometrically non-linear behaviour ray
3.3 Transient stiffness method 41
3.3.1. Static analysis of skeletal, ‘linear’ structures 42
3.3.2 Static analysis of skeletal, ‘non-linear’ structures — why
iterative computations are necessary 45
3.3.3. Transient stiffness method applied to static analysis of
tension structures. Role of geometric stiffness 46
3.3.4 Application of the transient stiffness method to
form-finding of tension structures 48
3.3.5. Evaluation of the transient stiffness method 50
3.4 Force density method 51
3.4.1 Application of the force density method 52
3.4.2 Numerical example 53
3.4.3, Matrix formulation of the force density method 54
3.4.4 Evaluation of the force density method 57
3.5 Dynamic relaxation method 57
3.6 Computational static analysis versus form-finding 58
3.6.1 Out-of-balance forces in static analysis and in
form-finding 58
3.6.2 Elastic and geometric effects in static analysis and in
form-finding 58
References 59
4. Dynamic relaxation method 61
4.1 Dynamic relaxation method with viscous damping 62
4.1.1 Stability of tie iterative solution 63
4.1.2 Critical viscous damping coefficient 65
iv
Contents
4.2. Dynamic relaxation method with kinetic damping 67
4.2.1. Iterative process 68
4.2.1.1 Location of the point of maximum kinetic energy:
correction for displacements 69
4.2.2. Application of the dynamic relaxation method with kinetic
damping to static analysis of tension cable nets 70
4.3 Efficiency of the dynamic relaxation relative to the
transient stiffness method 72
4.3.1. Simple net 72
(2x1) cable net cf:
(2x2) cable net 72
Hypar net 73
Spatial net 74
Saddle net 75
Results 75
Discussion 7
44 Evaluation of the dynamic relaxation method 79
References 80
. Case studies of cable roof structures. Design issues:
form-finding and patterning, 81
5.1 Introduction 81
52 Case studies 83
5.2.1 Spatial net 83
1.1 Geometry of the geodesic net and differentially
stressed net 84
5.2.1.2 Behaviour of the geodesic and differentially
stressed nets under imposed loading 85
5.2.1.3 Geodesic net versus differentially stressed form
and the ‘soap-film debate’ 04
5.2.2. Saddle net 95
5.2.3 Poskitt truss 97
5.2.3.1 Load Case 1 99
2 Load Case 2 100
3. Accuracy in model manufacture|patterning 103
5.2.34 Conclusions 106
References 106
Contents
6. Tension cables in suspension bridges. A case of form-finding
vi
6.1 ‘Shape equation’ for an inextensible suspension cable
6.1.1 The parabolic approximation
6.1.2. The catenary
6.1.3 Constant stress cable
6.2 ‘Shape equation’ for an extensible suspension cable
6.2.1. Extensible (elastic) cable under self-zveight
6.2.2 Extensible cable under self-weight and deck weight
6.3 Numerical modelling of shape of suspension bridge cables
6.3.1 ‘Geometric’ case. Form-finding of an inextensible
suspension cable under dead weight of the bridge
6.3.1.1 Inextensible cable. Form-finding for Load
Case 1 - deck weight only
6.3.2
6.3.3,
6.3.1.2
6.3.1.1.1
6.3.1.1.2
6.31.14
Hanger arrangements 1a) and 1(b) —
uneven number of hangers
Finite difference analysis. Deck
weight only. Hanger arrangement
1(a) — centre hanger present and
end spacing halved
Finite difference analysis. Deck
weight only. Hanger arrangement
1(b) — centre hanger present and
constant spacing throughout
Analysis of results - Load Case 1
Inextensible cable, Numerical form-finding for
Lond Case 2 ~ deck weight plus cable weight
‘Elastic’ case. Form-finding of an extensible cable under
dead weight of the bridge
6.3.2.1. Extensible cable. Numerical form-finding for
Load Cases 1 and 2
Comparisons between the ‘clastic’ and ‘geometric’ cases
6.3.3.1 Comparison of geometry
6.3.3.2. Comparison of load transfer
6.3.3.3. Practical aspects
eae
6.4 General comments
6.4.1 Form-finding of suspension bridge cables
References
Estimate of temperature effect
110
112
pe)
114
115
noe)
ae
119
119
122
122
125
126
127
128
129
aoe
136
136
136
138,
138
140
140
141
Contents
7. Modelling of tension membranes
71
a
73
7A
vi
7.6
77
78
ae
7.10
Introduction
Surface discretization
Surface discretization for use with the transient stiffness
method: limitations of the approach
7.3.1 Line elements
73.1.1 Elastic stiffness formulation of a line element for
use with the transient stiffness method
7.3.1.2 Geometric stiffness formulation of a line element
for use with the transient stiffness method
7.3.2. Limitations of the approach
Surface discretizations used with the dynamic relaxation
method
7.4.1 Line elements
7.4.2 Triangular, ‘triple force’ elements
7.43 High-order elements
7.4.4 Noir-finite element formulations
744.1 Cubic spline method
744.2 Triangular mesh method
Mesh control — implications for design
7.5.1 Case study: mesh control in form-finding and patterning
75.1.1 Analysis of results and consequences for design
Patterning of membranes
Line elements in modelling of stable minimal surface
membranes
Triangular elements in modelling of stable minimal surface
membranes
Numerical accuracy and criteria used for convergence
Pre-processing
References
‘Appendix I. Materials used for tension structures
143
143
143
144
144
149
bheya
153
aa
wks
155
156
156
161
163
165
167
169
170
174
ss]
177
181
vii
Contents
AI1 Fabric membranes
AL2 Cable structures
Appendix II, Minimal suzfaces
AIL1 Calculus of variations
AIL2 Variational problem: Euler-Lagrange equation for a
minimal surface
Appendix IIL Viscous damping in dynamic relaxation
Index
viti
181
182
185
185
187
aa
Preface
Tension structures offer wonderful design opportunities, due to their ability
to span large distances with elegance and structural efficiency. This book
covers two main types of tension structures: pre-stressed cable nets and
beams, and membrane structures, used as roofing forms. The discussion of
their behaviour is extended to include cables in suspension bridges, as they
are just a special form of cable trusses.
The most sensitive issues in the design of tension structures are the choice
and definition of their structural form. Cable nets and membranes, in their
tensioned state, adopt unique shapes that cannot be described by simple
mathematical functions. They, quite literally, have to be found during a
design stage, known as ‘form-finding’. This distinguishes them from conven-
tional, rigid-type structures, whose shapes can be imposed. Because of their
flexibility, tension structures exhibit load-shape interaction, which is visible.
If their initial shape is computed on the basis of some preconceived idea of
what the structure should look like, the actual shape may bear only some
resemblance to the image on a computer screen.
Minimum energy forms are observed in naturally occurring forms.
This was a focus of study in an inter-disciplinary research programme
SFB230 — Sonderforschungsbereich (Special Structures Group) under the
direction of Frei Otto at the Institute of Lightweight Structures (IL),
University of Stuttgart, Germany (1984-1995). The conclusion of that
programme, in which the author had an opportunity to participate, was
that principles of optimality and aesthetics of structures have their roots in
nature.
During the growth of a tree, for example, a constant surface stress devel-
ops to ensure a uniform distribution of load along the surface of a stem or a
branch. When a tree gets damaged, e.g. a branch gets broken off, the healing
process minimizes the surface area of the wound. It is interesting to observe
that the two features — a constant surface stress and a minimum surface
area — can also be found in inanimate natural objects such as soap-films
(the weight of the soap-film can be ignored). Soap-films are known, in math-
ix
Preface
ematical language, as stable minimal surfaces. This book postulates that the
principle of constant stress, which governs the formation of their shape,
should be taken seriously as a principle of design for tension membrane
structures,
The aims of this book are to enhance understanding of tension structures
from both a practical and theoretical point of view and to provide insights
into the problems associated with computational modelling of their struc-
tural form and behaviour. The most commonly used computational
approaches are described, together with a brief evaluation of each method.
The aesthetically pleasing examples of lightweight membranes illustrated
in this book are the results of the interactive use of computer and physical
models in a process that integrates both architectural and engineering skills.
Form-finding is a theme running through all chapters of the book, focusing,
on good and bad designs and discussing issues related to ill-chosen or ill-
defined forms of tension structures in a practical context. Initially, the author
had not envisaged the inclusion of form-finding calculations for suspension
bridge cables, as these, according to the current literature, are structures of
‘known shape’. The case studies included in the book show that this is not
necessarily true.
‘Patterning’ is another very important issue related to the manufacture of
tensioned cable nets and membranes. Regrettably, a detailed exposition of
the topic lies outside the scope of this book, and only a brief outline of the
subject is given. Mathematically, patterning remains an unresolved issue, as
it is not possible to ‘translate’ three-dimensional, undevelopable surfaces into
two-dimensional cutting patterns, without distortion. This is an area of inten-
sive research, made complex by the need to include non-linear and aniso-
tropic material properties of structural fabrics, while addressing the issue
of errors in surface geometry and minimization of wastage of material.
A brief description of the scope of the book is given below.
Chapter 1 gives an introduction to tension structures (with practical illus-
trations), provides a summary of their main features, and, finally, sets out a
discussion of certain misconceptions related to their design. Materials used
for tension membrane and cable structures are described in Appendix I.
Chapter 2 is devoted to the topic of ‘form-finding’. The significance of
natural laws in finding optimal forms of structures is discussed, particularly
in the context of soap-films (stable minimal surfaces). Some historical back-
ground to the mathematical modelling of such surfaces is provided and the
derivation of the basic result (the Euler-Lagrange equation (1760)) is given in
Appendix II. Difficulties associated with obtaining an analytical solution to
the Euler-Lagrange equation for an arbitrary boundary, or even making
effective use of the Laplace-Young equation (1806) describing the same
problem, emphasize the need for alternative approaches, involving num-
erically oriented methods. A brief description of the ‘soap-film debate’ is
Preface
given in relation to the design of membrane structures. The chapter ends
with the question: form-finding, or form-dictating?
Chapter 3 introduces the concept of geometrical non-linearity, characteriz~
ing the behaviour of tension structures. It discusses the most commonly used
computational methods in the modelling of structural forms and response to
loading. The methods described include the transient stiffness, dynamic
relaxation, and force density. Descriptions of each of the methods are fol-
lowed by a brief evaluation.
Chapter 4 gives the origin and a detailed description of the method of
dynamic relaxation, which has been successfully applied to the problem of
form-finding and static analysis of tensioned cable nets and membranes. The
development of the method from viscous to kinetic damping is outlined, and
the corresponding recurrence equations that enter the numerical algorithm
are derived. The derivation of the critical viscous damping coefficient is
given in Appendix IIL. The efficiency of the method, relative to the transient
stiffness approach, is described by a study of numerical convergence using
several cable net examples.
Chapter 5 gives a simple illustration of load transfer in cables to demon-
strate the need for a careful choice of the initial structural form of cable
structures. It presents case studies involving several cable structures, includ-
ing the Poskitt truss for which high-precision experimental measurements
are available. The case studies are used to highlight the issue of form-finding,
as oppose to form-dictating, raised earlier in Chapters 1 and 2. A study of the
behaviour of a geodesic net (a cable equivalent of a stable minimal surface) is
presented, and the issue of form-finding is discussed in the context of non-
geodesic (differentially stressed) nets. This leads to the ‘soap-film debate’
once again, but this time supported by the results of a case study.
Numerical modelling of the Poskitt truss is used to demonstrate the load-
relieving capabilities of tension structures. The chapter ends with a discus-
sion of the accuracy of the manufacture (patterning) of cable lengths, and
potential problems of gaining control over the shape of the structure on site
(with reference to experience with the Munich Olympic Stadium).
Chapter 6 extends the concept of form-finding to suspension bridge cables.
It is clear from perusal of acclaimed texts that suspension bridge cables are
assumed to have a parabolic shape. Such an assumption is valid only for
laterally flexible but inextensible and weightless cables. Occasionally, comments
are made about catenary shapes. In reality, when the elasticity of cables is
included, the resulting shape under the self-weight of the bridge is neither a
parabola nor a catenary; it is a shape that has to be determined through non-
linear analysis. The chapter starts with derivations of ‘shape’ equations for
both extensible and inextensible cables, in an attempt to clarify the issue from
the analytical point of view, before embarking on numerical analysis. Results
of numerical form-finding for both extensible and inextensible cables are
xi
Preface
given for a variety of span/dip ratios. In the case of inextensible cables, a
variety of hanger arrangements are studied. The results of numerical form-
finding of extensible cables are discussed within the context of potential
problems that may be experienced on site. The issue of form-dictating
is returned to at the end of the chapter, with a brief discussion of the
London Millennium Bridge.
Chapter 7 presents numerical modelling of tension membranes. It begins
with surface discretization — a common stage in all numerical approaches.
Mathematical formulations of line and surface elements are given for use
with the transient stiffness and dynamic relaxation methods, respectively
Limitations of the transient stiffness method are highlighted in the context of
the line element formulation. A criticism of the high-order (24 degrees of
freedom) elements for use in modelling of membrane structures is given.
This is followed by a brief description of the recent non-finite element
approaches to form-finding of stable minimal surface membranes. An
approach to form-finding, which employs seam-line control in order to assist
patterning, is described. The implication of such a methodology for design of
membrane structures is discussed using a case study. Solved numerical
examples of stable minimal surface membranes, validated by soap-film mod-
els, are used to discuss the performance of line, triangular and high-order
elements. Approaches to patterning are discussed in outline. The potential of
non-finite element approaches (used in form-finding) to facilitate patterning
is explained. Chapter 7 concludes with examples of stable minimal surface
membranes solved using an integrated Formian/dynamic relaxation
approach.
xii
Acknowledgements
The author wishes to acknowledge the use of some of the Figures provided
by her former PhD students in the course of their doctoral studies: Dr P. D.
Gosling (Figs. 7.17-7.18), and Dr T. S Lewis (Figs. 7.13-7.15, 7.19-7.21).
Thanks are also due to my research fellow, J. $. Brew, for providing
Figures 7.8-7.12.
The picture on the cover of this book is by courtesy of IL - Institute of
Lightweight Structures (now ILEK), University of Stuttgart.
xiii
Introduction
The term tension structures covers a broad category of structures, which
includes fabric membranes, pre-stressed cable nets, and cable beams in the
form of trusses and girders. They are being used either as roofing forms, or
bridge structures, and now a permanent feature of modern architecture,
showing their potential for exploitation as efficient structures and aestheti-
cally pleasing art forms.
The essential elements of a membrane structure are: (i) a highly flexible
fabric held under tension in order to generate stiffness in the surface; (ji) one-
dimensional flexible elements, i.e. ties or cables, to create ridges, valleys and
edge boundaries; and (iii) rigid support members sustaining compression/
bending. Cable structures are constructed using a combination of elements (i)
and (ii). The pre-stress in fabric membranes can be achieved by applying a
force at the boundaries, or by supplying an air pressure within the enclosure.
Cable structures can be tensioned by applying direct axial forces to the
cables, or by loading freely suspended cables with heavy cladding /decking.
The latter describes structures falling into a category of suspension cable
roofs and bridges.
Fabric and cable have come to be used in conjunction with one another as
major structural elements in designs that radically depart from traditional
constructions. Their exploitation potential is immense, ranging from large
span roofs over exhibition halls and sports stadia, to small canopies provid-
ing shelter from rain or sun (Figs 1.1-1.8).
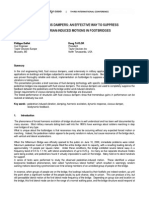
Figure 1.1 shows Munich Olympic Stadium, which is one of the earlier
examples of large tension roofing forms. The structure, designed by an inter-
disciplinary team from Stuttgart, represents an outstanding architectural and
engineering achievement of its time!" The cable roof, covering an area of
75000 m? required approximately 210 km of cable"! to make up the tension
net, as shown. The project, because of its scale, marked a significant shift
from physical model measurements towards computational methods for the
prediction of the initial geometry and structural behaviour.
Tension Structures. Form and behaviour
»)
Figure 1.1 Munich Olympic Stadium, 1972. (a) Aerial view, (b) view from inside.
Introduction
Further examples of tension structures are shown in Figs 1.2-1.8. The
Millennium Dome, which is a cable net structure clad with tensioned fabric
(Fig. 1.2), represents a departure from the usual anticlastic, or ‘saddle’ shape
(characterized by a negative Gaussian curvature) that gives tensioned mem-
branes their stability and stiffness. Instead, it has a synclastic shape (with a
positive Gaussian curvature) and its structural action is tension, rather than
compression that would be expected in a dome. The Millennium Dome,
therefore, raises a question of ‘when is a dome not a dome?"*! A further
discussion of this structure is presented in Section 1.4.1 and Chapter 2,
Section 2.3.4.
Figure 1.4 shows a membrane roof of a sports complex in East Germany.
The conical membrane forms are pre-stressed by vertical antennae and edge
cables. The roof is anchored to the ground by a series of slender masts, as
shown. The project involved re-structuring of an old sanatorium.
Tensile structures in and around Parque Expo '98 in Lisbon are shown in
Figs 1.5-1.7. They cover an area of 4000 square metres. Their visual impact is
most dramatic at night, as shown by Fig. 1.5 (b). The structure shown in Fig.
1.6 illustrates an unusual application of a tension membrane — it provides a
bridge between two channel sections.
The convertible umbrella structures''! shown in Fig. 1.8 are hydraulically
operated and designed for environmental/climatic control; they provide
shade during the day, and radiate heat during the night, when they are
closed. The exact opening and closing times of the umbrellas depend on
changes in temperature, which are monitored and fed into electronic con-
trols, The structures were designed by an interactive physical and computa-
tional modelling aimed at preserving a constant tension field in the
membrane. Physical modelling involved making and photographing soap-
film models made between boundaries geometrically similar to those in the
real structures. Soap-film surfaces are characterized by a constant surface
stress and their use as analogues in modelling of the umbrella structures
resulted in a purity of form valued in Islamic culture.
The issue of finding optimal forms of membrane structures and the role of
soap-film models is discussed further in Chapter 2. This also provides a main
focus of the book, as the theme of form-finding runs through almost every
chapter.
Tal
1.1 Definitions and classifications
‘There exist several categories of tension structures, as discussed below:
(® boundary tensioned membranes
(ii) pneumatic structures
(iii) pre-stressed cable nets and beams.
Tension Structures. Form and behaviour
‘proddony oing :uSts0q “dnysuouang sioBoy pampry -aampampey “090d “uopurT “yotame15 ‘smog untuayEYY ay, ZL 24
Introduction
Figure 1.3 Canopies around the area of the Millennium Dome, Greenwich, London, 2000.
1.1.1 Boundary tensioned membranes
Boundary tensioned membranes are stressed by stretching the surface to
meet the boundaries made of flexible, tension cables, or a rigid frame/
beam. Such structures are illustrated in Figs 1.1-1.8. The main difference
between a boundary tensioned membrane and a pneumatic structure
(discussed next) lies in the method of stressing the surface. Also, the former
has zero excess pressure between the outer and the inner surface.
The pre-stress levels in the surface must be of an appropriate level, to
ensure against a possible loss of tension during the life span of the structure
on one hand, and to allow the material to stay within the elastic range of
deformations on the other. Under imposed loads, such as wind and snow,
the stress in the surface can increase 6-8, even 10-fold. For these reasons, the
design of tension membranes is aimed at keeping the initial pre-stress at
approximately 1/20 of the breaking strength of the cloth. Further, it should
be noted that the value of the breaking strength of fabrics is based on the
strip tensile strength (measured uniaxially) of a clean, new, and dry cloth. In
biaxial tests, fabrics may exhibit strengths approximately half that value.
Their strength is also affected by temperature, moisture movements and
creep. Therefore, manufacturers’ specifications of mechanical properties of
Tension Structures. Form and behaviour
b)
Figure 1.4 Roof for a sports complex in Masserberg, East Germany, 1994. (a) Aerial view,
(b) elevation view. Design: IPL Ingenieurplanung Leichthau. Membrane structure:
Canobbio S.p.A., Milan. Photograph courtesy of Canobbio S.p.A
Introduction
»)
Figure 1.5 Exhibition area of Parque Expo '98 in Lisbon, Portugal. (a) Tensile roof.
Architect: A. Barreiros Ferreira, (b) umbrella structures, Architect: M. Salgado.
Design: IPL Ingenieurplanung Leichtbau. Membrane structure: Canobbio S.p.A.,
Milan. Photograph courtesy of Canobbio S.p.A.
Tension Structures. Form and behaviour
Figure 1.6 Suspended channel connection in Parque Expo '98 in Lisbon, Portugal.
Photograph courtesy of Canobbio S.p.A.
fabrics need to be confirmed through testing. The long-term properties of
structural fabrics are a subject of continual research. More generally, research
is needed to find inexpensive, fire proof, easily jointed and transportable
fabrics and to understand their thermal behaviour.
Fabrics for tensioned membranes can be made from natural fibres, such as
cotton (canvas fabric), ceramics (glass fibre), and synthetic organic fibres,
such as polyester. They are treated with layers of polymer coatings to
improve water tightness of the surface and enhance self-cleansing properties.
There is an enormous range of materials currently on the market, but the
most commonly used are: PVC-coated polyester, Teflon-coated glass fibre
one-coated glass.""> 16 171 A more detailed description of
Introduction
Figure 1.7 Entrance tent — part of the main entrance to Parque Expo ’98 in Lisbon
Portugal. Architect: A. B. Ferreira. Photograph courtesy of Canobbio S.p.A.
Figure 1.8 Convertible umbrellas 17x18 m, Profet’s Mosque in Medinah, Saudi Arabia,
1992. Design: Sonderkonstruktionen und Leichtbau (SL), Stuttgart. Photograph courtesy
of SL.
Tension Structures. Form and behaviour
the fabrics used in the construction of lightweight tension membranes is
given in Appendix I.
The applications of some of the types of materials for tension membranes
are illustrated in Figs 1.1-1.9. The roof for Munich Olympic Stadium (Fig. 1.1)
consists of a pre-stressed cable net supporting acrylic glass cladding. The
Millennium Dome (Fig. 1.2) was originally designed to be clad with a PVC-
coated polyester, but was later changed to a Teflon-coated glass fibre (PTFE)
to improve durability. The membranes shown in Figs 1.3-1.7 are made from
polyester fabric coated with PVC, except for the channel connection, which
was fabricated from PTFE. Some structures are fabricated from a special
PVC-coated polyester with a PVDF top coat (Appendix D, to reduce dirt
retention and protect the surface from harmful ultraviolet (UV) radiation.
Tension membranes, which feature in Fig. 1.8, have been manufactured out
of woven Teflon.
1.1.2 Pneumatic structures
Pneumatic structures, or ‘air houses’ (Fig. 1.9) are thin membranes stressed
by internal air pressure generated by fans." '*! Their shape is very strongly
affected by the difference between the external and internal pressures, which
change continually, as a result of temperature variations, wind and snow
load conditions. It is difficult to ensure adequate internal pressure through-
out the life span of the structure, due to unpredictability of environmental
factors, or failure of internal control systems responsible for maintaining the
internal pressure. Air houses are designed!® 1°! to maintain an internal
pressure between 0.2 KN/m? and 0.55 kN/m”. The design values of snow
loads are typically between 1.2 KN/m? to 2.4 kN/m? (on plan) and hence
much higher than an inflation pressure. It is therefore recommended that
heating of the internal air space is undertaken to melt the snow and prevent
dimpling (Le. reversing of the surface curvature) of the fabric, which would
otherwise occur.
Apart from the local damage to the skin of the membrane caused by the
accumulation of snow, or wind forces, or both, an overall instability of the
structure may also occur, due to wind excitation activating the large mass of
air inside the membrane. The performance of pneumatic structures depends
also on the grade of fabric used in construction. Good quality fabric has to be
selected to give an adequate factor of safety against the propagation of cuts,
or flaws likely to exist in the material. A factor of safety of 6, or more is
recommended, which implies that the stresses in the fabric, at any time,
should be at least 6 times lower than the minimum breaking strength (the
minimum breaking strength corresponds to a value below which no more
than 1% of breaking strength test results may fall). In addition, a factor of
safety of 1.5 is recommended for loads."
10
Introduction
»)
Figure 1.9 Air supported structure. Swimming pool in Bologna, 1994. (a) External view,
(b) view from inside. Photograph courtesy of Canobbio S.p.A.
11
Tension Structures. Form and behaviour
The popularity of pneumatic structures continues, because they provide
cheap alternatives to permanent structures. However, they are sometimes
designed without an input from structural engineers, which calls for tight
quality control measures.
1.1.3 Pre-stressed cable nets and beams
The next category of tension structures, pre-stressed cable nets and beams,
form, jointly with tension membranes, the main topic of study in this book.
There are very strong similarities between the behaviour of tension mem-
branes and cable nets. A pre-stressed cable net is, to an analyst, a discrete-
type membrane, or a membrane represented by a system of cable, or line
elements, as discussed in Chapter 7. The term ‘tension structure’ will be used
to describe both cable nets and membranes
Cable nets can be stressed directly using rigid supports such as compres-
sion ring beams (Fig. 1.10 (a)), or flexible edge cables with supporting masts
and tie backs (Fig. 1.10 (b)). They can take the form of a suspended structure
stabilized by means of a heavy roof cladding (Fig. 1.10 (c)), or can be encased
in concrete. The opportunity for creating new structural forms is
immense.!"? 113 141 If q pre-stressed cable net constitutes a part of a con-
crete shell, it is no longer a lightweight tension structure and the advantage
of flexibility is lost. However, because of their apparent visual lightness, the
shapes of cable net structures are copied into rigid forms, as was the case
with concrete ‘tents’ constructed in the Middle East in 1991.'"'!
Pre-stressed cable beams are two-dimensional versions of cable nets,
and their main application lies in industrial buildings. Cable beams can be
classified further into cable trusses and cable girders.
Cable trusses, illustrated in Fig. 1.11 (a) and (b) have their top and bottom
cables, as well as the internal members (known as hangers) all working in
tension. The main load carrying elements, i. the cables, have a much larger
cross-sectional area than the hangers. The shape of the truss and the initial
level of pre-stress must be so designed as to prevent hangers going into
compression under imposed load. Cable trusses can also be utilized as sus-
pended structures stabilized by a heavy cladding, or as pre-stressed forms
incorporating solid, rather than textile type cladding. A well-known example
of a cable truss is a suspension bridge (Fig. 1.11(c)).
Cable girders, illustrated in Fig. 1.12, incorporate struts as their compres-
sion members. The resulting forms are less flexible than cable trusses and, in
principle, no different to tensegrity systems/''®! which consist of cable
elements and bars; the bars may cross each other, but are connected only
to the cables. There are strong similarities between the behaviour of tense-
grity systems and cable nets, and, therefore, the two types of structures may
be considered as belonging to a group called ‘cabled structures’. The pos-
LR
Introduction
Figure 1.10 Pre-stressed cable nets: (a) spanning a ring beam, (b) spanning onto edge
cables and (c) supporting heavy cladding.
Tension Structures. Form and behaviour
aS
®)
~
-_-
Figure 1.11 Pre-stressed cable trusses: (a) inclined hangers, (b) vertical hangers, and (c)
suspension bridge structure.
sibility for creating hybrid forms by combining a cable truss and girder
into one cable beam is illustrated in Fig. 1.13.
‘The amount of pre-stress in a cable net structure depends on the allowable
deformations and fatigue strength of individual members. Excessive pre-
tensioning, of cables to reduce deformations is expensive, and, therefore, it
is important to derive the stiffness of the structure through changes in struc-
ture's geometry, arising from the alteration of boundary configurations. In
order to reduce costs, a certain amount of movement of the structure has to
Figure 1.12 Pre-stressed cable girder.
14
Introduction
Figure 1.13 Cable girder/truss.
be allowed, and therefore, the roof cladding design must incorporate this
requirement for flexibility.!"7!
Materials used for the construction of cable structures are discussed in
Appendix I. Cables!" 117, “8 are usually made from spiral steel wire
strands, or steel ropes containing steel or synthetic fibre cores, as illustrated
in Fig. AL2.1.
1.2 Design process of tension membranes
In this section and in the remainder of the book the term ‘tension membrane’
is used to describe boundary stressed structures (cable net and fabric) rather
than pneumatic membranes. In general, the design of tension membrane
structures follows a three-stage procedure:
@) the ‘form-finding’
i) the ‘patterning’
(iii) the ‘static analysis’.
One common problem that tension structures share is their shape definition.
With regard to boundary tensioned membranes, their configuration is not
given by an obvious mathematical function. Consequently, the designer is
faced with the problem of ‘form-finding’, ie. finding the basic static shape of
the structure (under pre-tension forces only), before detailed analysis, invol-
ving, imposed loads such as snow and wind, can commence. Thus, the ‘form-
finding’ stage addresses the question of the surface geometry of the tension
membrane spanning a given boundary configuration. In this case, a physical
model can be used for visualization purposes, but a detailed description
would entail problems such as error magnification, if measurements of the
model were to be scaled up toa full-size structure. Further, a measurement of
the actual tension field in the surface can be tedious and inaccurate. Hence,
for more accurate form-finding of tension membranes, iterative computa-
tions are carried out, which amount to a gradual adjustment of the surface
geometry until it becomes compatible with the state of static equilibrium and
15
Tension Structures. Form and behaviour
the level of pre-stress in the structure. A more detailed exposition of the
form-finding issues is given in Chapter 2.
The ‘patterning stage’ allows a three-dimensional shape of a tensioned sur-
face to be translated and relaxed into a two-dimensional cutting pattern, to
enable the manufacture of the membrane. The pattern has to be made out of
strips of fabric of 2-3 m wide, with minimum waste of material and distortions
of the fabric, This problem can again be solved using small-scale models,
which would provide useful information, but, as indicated above, the direct
use of the results for a full size structure could be questionable. Computational
methods employed for cutting patterns involve a certain amount of flattening
of the surface and this leads to inaccuracies. Further errors may be introduced
when simplifying assumptions are made in order to produce smooth cutting
lines automatically. In conclusion, an analysis through computation and phy-
sical modelling used interactively is believed to be the most effective approach
to both form-finding and patterning
Static analysis is a continuation of the form-finding process, in which
stresses and deformations are calculated under imposed external loads.
The process begins with the form-found shape of the structure, initially in
equilibrium, and with a given surface stress distribution. Static loads are
subsequently applied, and a new state of equilibrium is found. The proce-
dure has to follow an iterative computation, in which displacements of the
structure and stresses resulting from the applied loads have to be deter-
mined, as explained in Chapter 2. The problem is geometrically non-linear,
but the non-linearity is not as pronounced as in the case form-finding. Hence,
the convergence of the numerical solution is easier to obtain.
The dynamic analysis of lightweight tension structures, not listed under
the three-stage design procedure, is typically based on data obtained from
wind tunnel experiments involving small-scale models. The wind loading
is established with the help of pressure coefficients determined from such
experiments. Although codes of practice provide pressure coefficients for
conventional buildings, these cannot be used for doubly curved shapes of
tension structures, and hence the need for wind tunnel experiments
However, the small-scale models created for the purpose of wind tunnel
testing are usually made of rigid material, incapable of giving a true
representation of the pressures that may develop on the surface of a
flexible membrane. Conservative values of ‘equivalent static loads’ are
used to simulate wind action/"* '*! and this approximation has proved
to err on the safe side.
The major difficulty in the analysis of tension structures lies in establishing
not only the design values of wind loads, but also snow loads. Although
snow and wind modelling is cost-effective for large structures, it cannot be
afforded for smaller structures where experience, judgement, and code pro-
visions must be used. Tension membranes represent a considerably more
16
Introduction
complex aeroelastic problem than that encountered in aircraft wing design,
for example. With an aircraft wing, structural deflections may be assumed to
be small, and because the flow is one over a surface of shallow curvature, the
flow may be assumed to be ‘attached’. Consequently, the appropriate aero-
dynamic model is a linearized perturbation of the unsteady flow equations.
With a tension membrane, because of the curvatures involved, flows will not
necessarily be attached, and surface deformations resulting from wind load-
ing, may well be large. It follows that the classical approach to aeroelastic
modelling is likely to be of restricted significance in membrane structures,
and there is a considerable need for further research into the interaction of
surface geometry, wind loads and structural response.
1.3 Main features of tension membranes
The characteristic features of tension membranes are summarized below.
( A tensioned surface spanning an arbitrary boundary configuration
adopts its own, unique shape, consistent with the chosen boundary,
material properties and state of pre-stress (which can be constant or
varied). The shape of a tension membrane cannot be dictated, it has to
be found. The ‘form-finding’ process is the starting point in the design
process.
(ii) The structure accommodates loads through changes in surface ten-
sions and very large displacements, producing geometrically non-
linear behaviour. Even when the working loads are within the
elastic limit, the deflections are of such magnitude that the resulting
changes of the overall geometry must be accounted for in the analysis.
(iii) The level of pre-stress in a fabric membrane is usually kept low to
ensure against tearing under imposed loads. Compression and/or
bending stresses develop in a supporting structure.
(iv) The structural behaviour of tension membranes is characterized by
low bending and shear stiffnesses.
(v) The cost of the computational analysis, unlike that of a conventional
structure, forms a significant part of the total cost of the whole design
project.
These characteristics highlight the main differences between the design of
flexible, fabric roofing forms and conventional, rigid structures.
1.4 Conventional roofing forms versus tension membranes
The growing interest in tension structures can be attributed to two factors.
Firstly, they offer the designer scope for dramatic artistic expression, and,
ae
Tension Structures. Form and behaviour
secondly, they provide efficient, lightweight load-carrying systems. They
conform to a doctrine: ‘for an efficient structure use tension rather than compres-
sion, and either in preference to bending."-"!
The above statement has to be seen in a broader context of structural
optimization. Functionality can sometimes dictate the type of structural
action necessary to accommodate it. This is the case with CUBIC struc-
tures,!'°l which harness bending in floors and roofs in order to provide
space and access to services, while maintaining slim construction.
Structural design requires both architectural and engineering skills to pro-
duce a functional, safe (and sometimes even aesthetically pleasing) product.
In the design of a conventional, rigid-type building made of traditional
materials such as steel, concrete, timber or masonry, the engineering and
architectural aspects of the structure can be quite easily separated, as
explained in the succeeding sections. Rigid-type structures do not deform
very much, or at least not sufficiently, as to affect their overall geometry.
Their behaviour is descriked as ‘linear’, because they deflect proportionally
to the loads applied, ie. have a linear load—displacement relationship.*
Often, the term ‘linear’ is used to describe just the stress-strain character-
istics of the material. Structures which obey a linear load-displacement rela-
tionship will automatically be characterized by a linear stress-strain
relationship (Hooke’s law) for the material. However, the opposite may
not be true. In the case of cable structures, for example, the material may
be assumed to behave in a linearly elastic manner, but the behaviour of the
structure will, in general, be geometrically ‘non-linear’, unless very high
levels of pre-stress are imposed to limit the deflections. A cable structure
behaves in a ‘geometrically non-linear’ manner, which means that 1 fold
changes in the applied loads do not result in 1 fold changes in deflections.
In general, the shape of a conventional, ‘linear’ structure remains (to a very
good approximation) essentially unaltered, when the structure is subjected to
loading within its design specification. At the analysis stage, which follows
the conceptual design, an engineer perceives the structural form as a system
of simple, interconnected elements that need to be checked for stability,
deformation and stress under imposed loads (self-weight, wind, snow,
etc). The main tool used for this purpose is a ‘mathematical model’, ie. a
set of formulae relating external loads to internal stresses and deformations
of the structure. Numerous mathematical models exist for different types of
structures, load applications, and boundary conditions. They are based on
theories developed from observation and experiments concerning, the beha-
viour of materials, structural elements, and complete structures.
*The term ‘linear’ behaviour is used in this book to describe structures working
within the elastic limit and subjected to loading below critical buckling loads.
18
Introduction
During the analysis stage of a ‘linear’ structure, the engineer carries out
standard calculations for the sizing of the main load carrying elements. This
may take several iterations, before correct sizes are obtained. As already
mentioned, during the design process, the shape of the structure is rarely
questioned — unless it threatens the structure's suitability for a given pur-
pose. The architect remains responsible for the overall structural form, even
though he/she may have little comprehension of the complexities of the
mathematical modelling involved. It is the responsibility of an engineer to
make the structure safe. Therefore, the two roles — that of an architect, who
sees the structure purely in terms of geometry and purpose, and that of an
engineer, who understands it in terms of load paths and deformations — can
be quite separate.
In contrast, the design of lightweight tension structures requires full inte-
gration of both engineering and architectural skills. This is dictated by the
need to understand the interaction between the shape of the structure and
load patterns that may develop. Very large deflections (of up to 1 m), can
take place during the life span of the structure. The resulting changes of the
overall geometry, known as ‘geometrically non-linear’ behaviour, cannot be
ignored in the analysis. The governing non-linear equations, describing the
shape of the membrane under pre-stress and, subsequently, the behaviour
under the applied loads, cannot be solved using conventional methods,
applicable to ‘linear’ structures. Thus, the stress/displacement analysis has
to be carried out using iterative numerical procedures.
1.4.1 Common misconceptions relating to tension membrane design
One of the misconceptions concerning tension membrane structures is that
they are negatively characterised as ‘cheap’. This belief may stem from the
perception that fabric membranes are not as durable, or robust as conven-
tional structural forms made from concrete, steel or masonry. In view of this,
it is necessary to continue to improve design processes of tension structures
and enhance the quality of the end product. With the growing expertise in
the field of design and construction, and new, more durable materials
appearing on the market, the competitiveness of tension membranes against
conventional roofing forms will continue to grow.
It is generally not appreciated that the initial shape and the final config-
uration of a tension membrane under loading are not known. This leads to
another common misconception that ‘the form of a fabric structure can fit any
architectural vision’. A good example illustrating this point is the Millennium
Dome in Greenwich, designed as a part of a sphere made up of tensioned
fabric cladding and cables. As stated earlier, tension membranes naturally
adopt a ‘saddle’, or anticlastic shape (unless their boundaries lie in one
plane). Departing from this form and choosing a spherical shape for the
19
Tension Structures. Form and behaviour
Millennium Dome has led to problems associated with local saddling of the
fabric between the membrane supports, presenting a danger of ‘ponding’, i.e.
accumulation of snow and water on the surface of the membrane.''?"! Steps
taken to remedy the situation have led to a complex design, with the pro-
liferation of stays and their supports to enable the fabric to approximate the
spherical curvature. The issue of choice of the structural form of the
Millennium Dome is discussed further in Chapter 2, Section 2.3.4.
1.5 Closing remarks
Research carried out by the European Consortium''~! showed that at the
time of the Millennium, approximately 4-5 million square metres of land in
Europe were covered by membrane structures. This figure compares with 1
million square metres in 1988.'"?"! The growth of tension membrane struc-
tures indicates that they compete with the conventional roofing forms,
despite complexities involved in their design. Efforts are being made to
simplify the design process and this may encourage the growth of temporary
and semi-permanent membrane structures, with a variety of applications:
from light canopies providing shelter from harmful UV radiation, to protect-
ing animals in exposed areas against the elements.
Past experience demonstrates that tension structures can provide excellent
reliability and service, if they are properly designed, operated and main-
tained. For this to be possible, it is crucial to develop a good understanding
of the principles of optimal structural forms of tension structures. A more
detailed discussion of the subject is presented in Chapter 2.
References
[1.1] Forster, B. (1994). Cable and membrane roofs —a_ historical survey.
Structural Engineering Review, 6, No. 3-4, 145-174.
(1.2). Leonniaror, F. and Scutaicn, J. (1972). Structural design of roofs over the
sports arenas for the 1972 Olympic Games: Some problems of prestressed cable
net structures. The Structural Engineer, 50, No. 3, 113-119.
(1.3). Waker, D. and Aopis, B. (1997). Happold. The Confidence to Build. Happold
Trust Publications Limited.
(1.41. Catalogue (1995). The Work of SL. Sonderkonstruktionen und Leichbau,
Rohrerstrasse 140, D-70771 Leinfelden-Oberaichen. Germany.
(1.5]. Lippeut, W. I. (1998). Structural fabrics for foils. 1st Oleg Kerensky Memorial
Conference. I. Struct. E., June, 13/5-17/5.
[1.6]. Harpo. et al. (1987). The design and construction of the Dyplomatic Club,
Riyadh. The Structural Engineer, 654, No. 1, 15-26.
1.7]. Discussion. (1987). The design and construction of the Dyplomatic Club,
Riyadh. The Structural Engineer, 65A, No. 10, pp 377-382
[1.8]. Patterns 5. (1995). Buro Happold Consulting Engineers.
20
Introduction
[1.9]. Lippett, W. L (1994). Minnesota Metrodrome. A study on the behaviour of
air supported roofs under environmental loads. Structural Engineering Review, 6,
No 3-4, 215-235.
11.10]. ScuLaicu, J., BERGEMANN, R. and SoseK, W. (1994). The air-inflated roof over
the Roman amphitheatre. Structural Engineering Review, 6, No 3-4, 203-214.
[1.11]. Lippet, W. I. (1993) Air-supported structures. The Structural Engineer, 71,
No. 14, 247-249.
{1.12}. BucriioLor, H. A. (1985). Introduction to Cable Roof Structures. Cambridge
University Press.
[1.13]. Capasso, A., Majowrrcki, M. and Pinto, V. (1993). Le Tensostrutture a
Membrana per L'architettura. Maggioli Editore.
[1.14]. Majowigcki, M, (1994), Tensostrutture. Progetto E Verifica. CREA.
11.15]. Hupson, P. and Torrine, B. H. V. (1991). The design and construction of
reinforced concrete tents in the Middle East. The Structural Engineer, 69, No. 22,
379-385.
[1.16]. Viwnay, O. (1990). Cable Nets and Tensegric Shells. Ellis Horwood.
[1.17]. Pfeifer catalogue. Seilbauwerke. Lightweight Cable Structures. Pfeifer Seil-
und Hebetechnik GmbH & Co., Mammostrasse 1, P.O. Box 1754, D-8940
Memmingen, Germany.
[1.18]. Gumsine, N. J. (1983). Cable Supported Bridges. John Wiley & Sons.
[1.19]. Apois, B. (1994). The Art of the Structural Engineer. Artemis.
{1.20}. Kusix, L. A. (2002). Recent developments in CUBIC structures. Space
Structures 5. Thomas Telford, 1, 347-354.
[1.21]. Barnes, M. and Dickson, M. (2000). Widespan Roof Structures. Thomas
Telford.
[1.22]. Final Report to the European Commission (2000). Framework IIL CRAFT
Project. Contract BRST.CT98-5166. Proposal BES2-2498: Design and
Manufacture of Minimum Energy Forms of Lightweight Tension Membranes
(DELITE).
[1.23]. Berns, S. (1988). Architectural fabric membrane roofs. Construction Specifier,
41, No. 11, 112-120.
]
Form-finding
2.1 General concepts. Nature’s ‘secrets’
Cable structures and fabric membranes adopt unique shapes under tension.
Such shapes, or forms, are not known a priori; they cannot usually be
described by simple mathematical functions, and, therefore, require the
designer to get involved in a process known as ‘form-finding’. This require
ment distinguishes tension structures from other structural types, such as
those made of concrete, steel (other than cable), or masonry, where it is
possible to dictate the shape at the outset of the design.
In general, the process of form-finding should yield optimal structural
shapes: shapes that would satisfy the functional requirements and atten-
dant durability and strength at a minimum cost. As noted at the outset of
Chapter 1, one of the most attractive features of tension structures is their
ability to offer aesthetically pleasing, even dramatic effects. However, the
aesthetic aspect of any design is often the most disputed one. Research
carried out at the Institute of Lightweight Structures (IL) at the
University of Stuttgart during 1964-1991, under the direction of Frei Otto,
focused on structural forms, which obey a ‘lightweight principle’; that is,
use a minimum amount of material while maximizing, through the shape
optimization process, their stability and strength. This process consisted of
predominantly experimental work on small-scale models, carried out by
interdisciplinary teams of architects, biologists and engineers. They
engaged in an iterative process of improvement and selection, in which
aspects such as symmetry, perspective, and proportion were all considered,
in addition to the optimization criteria and the structure’s function. The
results were quite surprising — even though the research teams did not
expect to create perfect objects, aesthetic aspects were inherently present in
them.” They emerged naturally, in, what was considered a ‘self optimi-
zation’ process. It was concluded that the path to achieving an aesthetic
23
Tension Structures. Form and behaviour
product is never straightforward and that the ‘lightweight principle’ has its
roots in nature.
The topic of natural structures has interested biologists, mathematicians,
and architects for many years. D’Arcy Thomson, in his book On Growth and
Form?! examined a variety of natural objects and discussed principles
behind their formation. Shells, for example, grow in size, but do not change
their shape, maintaining constant similarity during growth. Their shape can
be described by equiangular, or logarithmic spiral, described by:
@=klogr (21)
where, with reference to Fig. 2.1, it can be seen that sectors cut off by suc-
cessive radii, at equal vectorial angles grow continuously without changing,
the shape. The vector angles about the pole are proportional to the logarithm
of the successive radii.
Interestingly, the logarithmic spiral is also a shape observed in natural
objects, such as tiger claws. This allows the external loads to be transmitted
axially.
Research carried out by Mattheck,?* into the mechanics of tree growth,
also stresses the importance of natural laws for the design of man-made
structures. Trees are highly optimized objects, characterized by a minimum
weight, with sufficient strength to carry all relevant load cases. The mechan-
ism of tree growth ensures a constant stress distribution on the surface of the
stem and branches of the tree. The principle of homogeneous surface stress
distribution, which exists naturally in trees, has been applied to the design
and optimization of engineering components subjected to fatigue stresses. In
this case, the process of optimization consists of allowing a mechanical com-
ponent to ‘grow’ into a shape of constant surface stress." 25! Because of the
presence of a three-dimensional stress field, a constant value of von Mises
stress is used in the process of optimization of these ‘biological components’.
The von Mises stress is calculated from the maximum-distortion-energy
Figure 2.1 Logarithmic spiral
24
Form-finding
theory/**! which relates a three-dimensional stress field to a single value of
stress, as in:
a
(1/v2) Ve = 0)? + (02 — 03) + (oy — 037 (2.2)
where, 03, 03, and 3 are the local principal stresses. & is the equivalent
uniaxial stress, which can be compared with the yield stress in the von
Mises yield criterion. A value above the yield stress indicates ductile failure
of the material. The von Mises stress equation implies that the initial yield
surface expands uniformly and in proportion to the root mean square differ-
ences of the principal stresses.
Mattheck demonstrated that engineering components optimized according
to the biological rule of constant surface stress are characterized by minimum
weight. His work served as inspiration to a group of researchers in Australia
who developed a method known as ESO — Evolutionary Structural
Optimisation.’””! The method relies on removing inefficient (lightly stressed)
material from a structure, in an iterative process involving finite element
modelling. The basis of the material removal is the value of the von Mises
stress relative to some assigned value
It is clear that in the case of shape optimization of engineering com-
ponents, the requirement of a constant surface stress cannot be fulfilled
for all possible load cases. While living structures (trees) can compensate
for changeable load conditions by adaptive growth, engineering. struc-
tures are not able to do so. Consequently, decisions have to be made
as to the most critical load combinations. The need to establish a design
principle that would incorporate different load cases and load combina-
tions in the process of shape optimization/shape finding, is an area of
active research.
The origin of Mattheck’s work lies in observation of trees and tree
growth. When a tree gets damaged, ie. a branch gets broken off, the
healing process minimizes the surface area over the wound. The two
features described: a constant surface stress and a minimum surface area
can be found in non-living objects, such as soap-films. Soap-films serve
as examples of ideal lightweight tension membranes. They are laminae
that adopt a configuration consistent with a (local) minimum potential
energy arising from surface tension. Because the potential energy is a
minimum, the configuration is stable and can be realized by a soap-film.
Furthermore, such a configuration is characterized by a minimum sur-
face area. In mathematical language, a soap-film is referred to as a stable
minimal surface, The subject of the mathematics of minimal surfaces has
been continually explored, since its first introduction in the eighteenth
century,
7
Tension Structures. Form and behaviour
2.2 Concept of a ‘minimal surface’ — historical background
The earliest mathematical equation describing minimum area surfaces using
the calculus of variations was derived by Euler (1744).'°*! It was reformu-
lated later by Lagrange (1761)?! and since then became known as the
Euler-Lagrange equation. It has proved very difficult to find closed forms
of solutions to this non-linear second-order partial differential equation, par-
ticularly for general boundary configurations containing sharp corners.
However, mathematicians have discovered many properties of minimal
surfaces, together with two well-known classes of solutions, which are the
catenoids and the right helicoids (shown in Figs 2.2 and 2.3, respectively).
The full derivation of the Euler-Lagrange equation, based on calculus of
variations, is given in Appendix II.
Work carried out independently by Young, (1805) and Laplace (1806)
showed that for a curved fluid surface, the relationship between the excess
pressure across the surface at any point and the radii of principal curvatures
is given by!210 211, 212]
iL gach
=o(—+— 3
reo(t) es
where p is the pressure difference between the inner and the outer surface, «
is the surface tension, and 7; and rz are the maximum and minimum radii of
principal curvature, that occur in planes perpendicular to each other and are
both perpendicular to the tangent plane of the surface.
In the case of soap-films, o is known to be constant, and if the excess
pressure p is zero (i.e. the soap-film is not a soap bubble), then eqn (2.3) is
reduced to
14
1,19 (24)
non
Figure 2.2 A catenoid.
26
Form-finding
Figure 2.3 A helicoid.
This result connecting the principal radii of curvature of a minimal surface
was discovered by Meusnier (1785) who used a purely mathematical argu-
ment, which showed that the Euler-Lagrange equation could be re-expressed.
in terms of the radii of curvature p; and p2 at any point on the minimum
surface defined by any orthogonal pair of axes"! Thus,
1
PL Pe
(2.5)
Introducing the mean curvature H as the arithmetic average of the
principal curvatures:
pT
aaa) eo
it can be said that at each point, a surface of minimum area must have a mean
curvature of zero.
It should be noted that the feature of zero mean curvature is not unique to
minimum area surfaces, such as soap-films. They are a feature of ‘minimal
surfaces’, of which soap-films are a special case, because they are surfaces
which are also stable and possess a minimum area. The term ‘minimal sur-
face’, used since the earliest days of the subject, can be a source of confusion.
The central point is that the Euler-Lagrange equation for the area functional
(Appendix I), is a necessary condition to extremize the functional, ie, the
resulting area may be a maximum, or a minimum, but it is always subject to
the condition of zero mean curvature. Therefore, mathematicians use the
a
Tension Structures. Form and behaviour
term ‘minimal surface’ to describe surfaces of zero mean curvature.?" It
would have been helpful, if the subject had been termed ‘extremal surfaces’
rather than ‘minimal surfaces’. However, to draw the distinction, when it is
important to do so, mathematicians refer to surfaces of minimum area as
stable minimal surfaces; and surfaces of maximum area as unstable minimal
surfaces; a terminology that is drawn from the physics of soap-films. In sum-
mary: every soap-film is a minimal surface, but not every minimal surface is
a soap-film. In order to avoid confusion, the term ‘stable minimal surface’
rather than ‘minimal surface’ is used throughout this book.
Many questions related to soap-films, including that of how many stable
minimal surfaces can span a given contour, were addressed by a Belgian
physicist Plateau (1873).?"5! By numerous experiments he demonstrated
that every contour of a single closed curve bounds at least one soap-film
However, the challenge to prove this phenomenon mathematically became
so great that mathematicians recognized it as the ‘Plateau problem’. It was
not until 1930 that this problem was significantly advanced." It was
shown that for each simple closed curve there exists a surface of minimum
area
The role of soap-films (stable minimal surfaces) in form-finding of tension
membrane structures is discussed in Sections 2.3.2 and 2.3.3. An overview of
the subject can be found in Refs [2.17] and [2.18].
2.3 Form-finding methodologies
In general, the process of form-finding of surface stressed membranes
involves:
(@ the construction of small-scale physical models using soap-film,
fabric, or paper, and/or
(ii) the development of computational models using a variety of numer-
ical techniques.
2.3.1 Physical models
Physical models continue to be used at various stages of design, mainly as
means of communication between the members of the design team and as
verification of computational results. However, the limitations of physical
modelling, noted in Section 1.2 of Chapter 1 and discussed below, are the
main reasons for the increasing application of computational methods in
preference to expensive hand-made models, particularly when numerous
changes, or refinements of the surface geometry have to take place.
The design of the German Federal Pavilion for the Montreal Expo’ 1967
was based on measurements of small-scale models made of soap-film and
28
Form-finding
fabric. The process required a sequence of models, refined with painstaking
care and precision, to ensure that the measured geometry of the surfaces
could be used for the static analysis phase and construction drawings. The
prototype of the structure was built on campus at the University of Stuttgart
and subsequently used to house IL— The Institute of Lightweight
Structures.
The structural design of roofs over the sports arenas for the 1972 Olympic
Games in Munich (Chapter 1, Fig. 1.1) also involved the construction of
hand-made models. A model of the Stadium was constructed to a scale of
1:125, but conventional measurements proved too inaccurate for the genera-
tion of cutting patterns for the full-size structure.”"! The problem of accu-
racy was solved at the experimental stage by taking photogrammetric
measurements of the model, and smoothing the scatter in data numerically,
to give what was believed to be a good estimate of the equilibrium config-
uration. However, certain unforeseen problems occurred during the con-
struction of the roofs. It was found that inaccurate pre-cutting of cables on
site led to a variation of forces in the cable net of up to 60%, compared with
the predicted values. A simple calculation showed that a systematic error of
0.75 mm in every mesh width of 750 mm would give a total error of up to 50
mm ina 50 m length cable. The longitudinal errors thus obtained had a direct
effect on strains. As a result, a substantial redistribution of forces in the
cables took place after the structure was installed.
The design of the Munich Olympic complex stimulated further research
into computational modelling of tension structures, which, as already indi-
cated, has largely replaced extensive use of expensive physical modelling.
However, computational modelling alone has not produced uniformly good
results. Experience gained so far indicates that a combination of computa-
tional and physical modelling is a far more promising strategy than exclusive
use of either methodology. Although theoretical modelling has grown stea-
dily in sophistication, its limitations need to be clearly understood. It is still
vitally important that the design team possesses analytical and visualization
skills necessary to produce structurally efficient and aesthetically pleasing
solutions. Physical models convey a visual impression instantaneously, from
any perspective, and more truthfully than a computer image. The examples
of tension membranes given in Chapter 1, Fig. 1.8, are illustrations of the
quality of design that can be achieved by a mixed approach, involving com-
putational and physical models.
2.3.2 Computational models
Computational models of tension structures represent a set of numerical
and graphical data describing structure's shape, stresses and deformations
29
Tension Structures. Form and behaviour
under certain load conditions. The data are obtained from numerical
algorithms describing an iterative process of geometric adjustment of a
tensioned surface, until a static equilibrium (i.e. the equilibrium of all
forces acting on the surface) is reached. As with all numerical methods,
an inspired guess of ‘what the surface should look like’ is the starting
point of this process. The ‘guessed forny is unlikely to satisfy the condi-
tions of static equilibrium and hence iterations are needed to reach the
final result.
The term ‘form-finding’, used in relation to computational modelling, can
mean one of the following:
(i) finding an optimal shape of a tension membrane (e.g. a stable minimal
surface)
(ii) finding a shape of a tension membrane that is in static equilibrium,
but does not necessarily have constant surface stress
(iii) finding a shape, which approximates the state of full static equili-
brium (common in some design methodologies combining form-
finding and patterning).
In the first case, the boundaries of the structure are imposed, and the
numerical algorithm is corstructed in such a way as to allow the surface
to adopt its own geometric configuration, according to the natural principle
of constant surface stress.
In the second case, the condition of constant stress is relaxed, as in the case
of the force density method discussed in Chapter 3. The resulting structural
form is in static equilibrium, but, as indicated above, the surface stress is not
necessarily constant.
Finally, case (iii) represents an attempt to shorten the design path by
utilizing the same mesh, or at least some of it, for both form-finding
and the cutting pattern development. In order to achieve that, mesh
distortions during the form-finding process are controlled. This is car-
ried out in various ways. One method, described in Chapter 7, Section
7.4.3.2, assumes that the positions of the seam lines in the x-y plane are
known at the outset and vemain unchanged as a result of form-finding.
Consequently, the movement of the nodes in the x-y plane during the
actual process of form-finding is prevented. This methodology ensures
equilibrium in the z-direction only. The shape of the resulting surface
may approximate the final (fully equilibrated) surface quite closely, but,
the smooth lines on the surfaces are not the lines of full static equili-
brium, and therefore should not be used as seam lines to generate
cutting patterns. A more detailed analysis of the problem of mesh
control and its implication on the final design is given in a case
study presented in Chapter 7, Section 7.5.1.
30
Form-finding
2.3.3 ‘Soap-film debate’
Equation (2.3) can be exploited in form-finding of tension membrane struc-
tures. A repetitive calculation of curvatures until the pressure difference
across the surface is (almost) zero would render, ultimately, a stable minimal
surface structure. Such a form-finding methodology is outlined in Chapter 7,
Section 7.4.1.
If a membrane structure has a shape of a stable minimal surface, i-e., it is
characterized by a constant pre-tension in every direction, and its thickness
and density are uniform, then the amount of material required to construct it
is minimal. Such a structure can be referred to, in an engineering context, as
obeying the ‘lightweight principle’ (concept introduced in the opening para-
graph of section 2.1).
Unfortunately, ‘soap-film analogy’, or the use of soap-films as analogues
for computational form-finding of tension membranes (Fig. 2.4) is not uni-
formly accepted. It is argued that stable minimal surfaces are ideal struc-
tures, but for one load case only, ie. their own surface tension. This
argument is extended further by stating that there is a need to control the
structural form by means of differential pre-stressing, in order to limit the
deflections of the structure arising from additional loads, such as snow and
wind. At first sight such an argument may appear plausible, but it ignores
Figure 2.4 A soap-film model — an analogue for a membrane canopy. Photograph cour-
tesy of Institute of Lightweight Structures, (IL), Stuttgart.
31
Tension Structures. Form and behaviour
various options available io the designer. A stable minimal surface has its
shape determined by the boundary configuration and the uniform loading
applied around the boundary. Varying the boundary configuration and,
possibly, the level of constant pre-stress in the surface, gives the designer a
considerable degree of flexibility in meeting the specified load cases. In
a number of actual designs, however, rather than repeating the process of
form-finding for different 20undary configurations, and levels of pre-stress,
an easier option of controlling the structural form, by uneven pre-tensioning,
is chosen. Such a strategy, in general, is unwise, as explained below.
To optimize the fatigue/creep characteristics of fabric, it is clearly desir-
able to have both warp and weft fibres (Fig. 2.5(a)) in the same, or nearly the
same state of stress, so that the consequences of randomly applied loading
are essentially born equally by both sets of fibres and, as a result, their
‘ageing’ is comparable. If the initial surface, prior to the application of static
and dynamic loads, is in a state of constant surface stress, the resulting form
is a saddle shape, in which the curvatures are equal and opposite (Fig,
2.5(b)), and the ratio of tension in the hogging to sagging directions is
equal to one. On application of external loading, fibres aligned in the sagging
direction will undergo an increase in tension, while those in the hogging
direction, a corresponding decrease. The result is an uneven distribution of
stress, but this in itself does not, as is sometimes claimed, invalidate the
argument for the design of constant surface stress structures (stable minimal
surfaces), for the following reasons.
Assuming, initially, that the fabric is made of an isotropic material,* but
the shape of the membrane arising from the process of form-finding is such
that the tension field in the surface is not constant, it follows that fibres which
are tensioned more, i.e. have a greater stiffness, will attract more load than
those with lower tension, as shown in Fig. 2.6(a). As noted earlier, if the warp
fibres follow the sagging curvatures, and the weft fibres, the opposing hog-
ging lines, the structure will resist externally applied loads (such as snow) by
an increase in tension forces in the sagging, direction and a corresponding
reduction in the hogging direction. This is true for both types of structures ie.
those with a non-uniform and uniform initial stress fields, respectively.
However, what is apparent from Fig. 2.6(a) is that, in the case of differential
pre-stressing (i.e. when the ratio of tensions in the sagging to hogging direc-
tions is not equal to one), the difference in tension forces produced in the two
sets of fibres by the external loads can be much greater than in the case of the
“Research into developing isotropic materials for membrane structures continues.
Certain fabrics, such as the ‘précontraint technique’ developed by Serge Ferrari
(B.P. 54-38352 La Tour-Du-Pin Cedex, France) are deemed to be isotropic, i.e. char-
acterized by the same elongation in warp and weft directions.
ae
Form-finding
a)
, 8
a5 aE
mi
Ean @
oe ee
ae OE oe
ae
aE aE @
7a a
Ea boa
2 ee
|
a a
Ea Ea
a i i
=
‘ie a” a”
war direction
aa
‘Warp
Figure 2.5 (a) Warp and weft directions in fabrics, (b) alignment of fibres in a surface.
initial constant tension field. This argument is reinforced by a case study
presented in Chapter 5, Sections 5.2.1.1-5.2.13.
It should also be noted that imposed loads are temporary and, in their
absence, the structure designed as a stable minimal surface remains in its
optimum state of uniform tension. It is simply impossible to optimize a
structure for every conceivable load case. Tension membranes that give
33
Tension Structures. Form and behaviour
Stress
d Displacement Strain
°)
Figure 2.6 (a) Idealized load-displacement relationship for unequally stressed fibres (iso-
tropic material), (b) stress-strain relationship for anisotropic material (warp and weft
directions), (c) Ferari ‘Precontraint’ treatment of fabrics: crimping followed by coating
rise to very uneven stresses in the fabric are predisposed to differential
ageing” of fibres and earlier rupture than would have occurred in a lower,
more equitable distribution of stress.
The argument presented above becomes mote itivulved when anisotropic
fabrics are considered. Generally, the weft direction is weaker than the ‘warp.
Therefore, pre-tensioning both sets of fibres to the same level would mean
that the stresses in the weft direction are of a higher proportion of the break-
ing strength of these fibres compared to the warp. It is therefore necessary to
set the pre-stress at an appropriate level. Biaxial tests carried out on samples
of anisotropic material show that for the same value of pre-stress applied in
warp and weft directions, different levels of straining in the respective direc-
“It is recognized that fatigue stresses in organic fibres can generally be ignored, but
the same is not necessarily true for glass, or polymeric fibres. In cases where high pre-
stress is present (‘compacting’ the fibres together) and there are stress fluctuations
coupled with the changes of the angle of the weave, fatigue damage could occur.
34
Form-finding
tions occur (Fig. 2.6(b)). In fact, at a certain low value of pre-stress, the warp
yarns, being initially straight, undergo crimping, which results in their rela-
tive contraction, rather than expansion, as measured on plan; a phenomenon
known as ‘crimp interchange’. The problem of crimp interchange is more
pronounced in fabrics subjected to differential pre-stressing. The difference
in the level of straining between the warp and weft fibres under the initial pre-
stress has to be taken into account at a patterning stage, where appropriate
compensation factors, expressed as percentages of unstrained lengths of
material in the two respective directions, are applied. In order to exercise a
maximum degree of control over patterning problems, the effects of crimp
interchange should be minimized as far as possible. This, to some extent, has
been addressed by Ferrari who developed special treatments for their fabrics.
The treatments amount to pre-stressing the fibres so that their crimp in both
directions is comparable, and subsequently applying plastic coating to both
surfaces of the fabric, as shown in Fig. 2.6 (c). As a result, the same, or nearly
the same stiffness in both warp and weft fibres is achieved, which helps to
maintain a fairly uniform distribution of stress during the life-span of the
structure. However, another practical aspect that needs to be considered is
that in the case of an inappropriate cutting pattern, coated fabrics being stiffer,
may not be as ‘forgiving’ as, for example, canvas.
It should be noted that, in general, patterning cannot generate surfaces of
exact constant tension, because of material properties, and, to some extent, the
weight of the fabric. The latter is known to be small (estimated to give a change
in the initial tension field of around 1%). The geometry of the structure is not
noticeably affected by the weight of the fabric, unless the membrane surface is
flat and/or has unsuitable pretension levels (the typically used pre-stress
values are: 1.5 kN/m for PVC/ polyester, and 2.5-4.5 KN/m for PTFE fabrics).
Theoretically, the weight of the fabric could be modelled numerically by
assigning elastic properties to the form-found shape (with its initial tension)
and loading the structure with just the weight of the fabric, in order to
predict the initial shape and tension field ‘precisely’. However, such an
exercise may prove futile, as, ultimately the effect may be swamped by
much greater uncertainties in the material properties of the fabric. Fabric
weight is usually included at the static analysis stage, together with other
imposed loads. Despite all these limitations, patterning can produce good
results, demonstrated by low variations in the initial tension field of the
structure. This is possible only if form-finding is carried out to achieve a
stable minimal surface form.
2.3.4 Form-finding, or form-dictating?
Many designers are reluctant to follow the soap-film analogy in form-finding
of tension membrane structures. Their judgement is affected by some of the
35
Tension Structures. Form and behaviour
practical difficulties outlined above, concerns over the control of deflections,
and sometimes by the failure to appreciate the form-finding aspect that
would lead to optimal shapes of tension structures.
As stated earlier, a membrane tensioned between non-planar boundaries
adopts a ‘saddle’, or anticlastic shape. The Millennium Dome represents a
deliberate departure from such a form, in order to fulfil an architectural
concept. Further to the comments made in Chapter 1, Sections 1 and 1.4.1,
it should be noted here that in addition to the numerous masts and ties used
to maintain the required shape of the Dome, radial cables had to be pre-
tensioned to about 2/3 of the peak tension to ensure an adequate level of
stiffness.?° Saddling could not be eliminated altogether and it remains to
be seen how the Dome will behave under snow loading, It is estimated that
700 km of cable was used in the structure (compared to 100 km in the Munich
Olympic Stadium)
Dictating the shape of a tension structure beyond what is known to be its
optimal form, i.e. an anticlastic shape, may have unforeseen consequences
and, long term, may prove to be futile; over a period of time, the structure
will creep towards its minimum energy form, in an attempt to equalize
stresses. In the case of the Millennium Dome, the minimum energy form
towards which the structure will have a tendency to creep, is a flat surface
(a special case of a stable minimal form)
The feature of constant surface stress present in many natural objects, such
as soap-films or trees, arises from the process of minimization of the potential
energy of surface tension. Designs which aim to implement (as far as is
practically possible) this biologically inspired ‘lightweight principle’ produce
stable, durable, and aesthetically pleasing structural forms (Fig. 1.8), which
use a minimum amount of material. Such characteristics are the key metrics
of sustainable development.
It is recognized that the architecture of the minimal is one of the future
directions, not the only direction. Form-finding is the subject that needs to be
studied in a context broader than just the efficiency of the structural form, or
its visual impact; it is possible to create structures, which are simply inter-
esting, dramatic looking sculptures.
Good architecture is more important than beautiful architecture. Beautiful
architecture is not necessarily good.2?"!
References
[2.1]. Orro, F. (1979). The aesthetic. IL 21,141-190.
[2.2]. D'Arcy THomson, W. (1917). On Growth and Form. Cambridge University
Press.
36
Form-finding
[23]. Marturck, C. (1990). Why they grow, how they grow: the mechanics of
trees’. Arboricultural Journal, 14, 1-17.
(2.4). Martusck, C. and Mouvennauer, H. (1990). An intelligent CAD method
based on biological growth. Fatigue Fractures of Engineering Materials and
Structures, 13, No. 1, 41-51.
[2.5]. Matrnec, C. and Burkarot, S. (1990). A new method of structural shape
optimisation based on biological growth. International Journal of Fatigue, 12, No. 1,
pp. 185-190.
[2.6]. Bupynas, R. G. (1977). Advanced Strength and Stress Analysis. McGraw-Hill
Book Company, 1977.
[2.7]. Xie, Y. M. and Stevens, G. P. (1997). Evolutionary Structural Optimisation.
Springer, London.
[2.8]. Ever, L. (1952). Opera omnia. Orell Fiissli, 24, 25.
12.9]. Lacrance, J. L. (1889). Mécanique Analytique. 4th edn. Gauthier-Villars.
[2.10]. Isenserc, C. (1978). The Science of Soap-films and Soap-bubbles. Tieto Ltd.
[2-11]. Lartace, P. S. (1839). Mécanique Céleste. Impr. Imperiale, supplement to
10th Book, 1806. See also Laplace P. S., Oewores. In English, annotated translation
by N. Bowditch, Little and Brown, IV.
[2.12]. Youne, T. (1807). A course of lectures on natural philosophy and the
mechanical arts. J. Johnson, I, 468-469.
[2.13]. Meusnier, J. B. M. C. (1776). Memoire sur la courbure des surfaces. Mén
Mathém. Phys. Acad. Sc. Paris, prés. par du Savans. Verlesen, 10, 477-510
(2.14). Hivpesranot, $. and Trowaa, A. (1984). Mathematics and Optimal Form.
Scientific American Library.
[2.15]. Patra, J. A. F. (1873). Statique expérimentale et théorique des liquides
sommis aux seules forces moléculaires. Gauthier-Villars, Trubner et Cie, F.
Clerune, Vols 1 and 2.
[2.16]. Ravo, T. (1933). On the problem of Plateau. Ergebnisse der Mathematik und
ihrer Grenzgebiete. Springer-Verlag, Berlin.
[2.17]. Lewis, W. J. (1999). Lightweight tension structures — an aesthetic integra-
tion of geometry and mechanics. Part | — The role of minimal surfaces and soap-
films. Mathematics Today (the IMA Bulletin), 35, No. 1, 10-16.
(2.18). Lewis, W. J. (1999). Lightweight tension structures — an aesthetic integra-
tion of geometry and mechanics. Part Il — Finding the form of minimal surface.
Mathematics Today (the IMA Bulletin), 35, No. 3, 80-84
[2.19]. Leontiarot, F. and Scuiaicn, J. (1972). Structural design of roofs over the
sports arenas for the 1972 Olympic Games: Some problems of prestressed cable
net structures. The Structural Engineer, 50, No. 3, 113-119.
[2.20]. Barnes, M. and Dickson, M. (2000). Widespan Roof Structures. Thomas
Telford.
[2.21]. Orro, F. and Rasch, B. (1995). Finding Form. Towards an Architecture of the
Minimal. Axel Menges.
Bid
3
Geometrically non-linear behaviour.
Solutions by commonly used numerical
methods
3.1 Geometric non-linearity
As stated earlier (Chapter 1, Section 1.4), tension structures exhibit geome-
trically non-linear behaviour: ie., even when working within the elastic
limit, their deflections can be so large that the resulting changes of the
overall geometry must be taken into account. Geometrically non-linear
behaviour is not unique to tension structures, and, in order to understand
the problem, it may be helpful to consider a simple structure, which is not
pre-tensioned, but which can exhibit large displacements under applied
loads
Example. Two-bar structure
The structure, shown in Fig. 3.1, consists of two linear elastic bars pin-jointed
at the centre and at the supports, and separated by a distance of 2b. The
initial, unstrained length of the bars is Lj, and the current length is given by
Liv €r Where ey, is the extension of each bar.
Vertical equilibrium gives
P= 2Ke,, sin 6’
(3.1)
Vy Ent
are
where K is the elastic stiffness of the bar, equal to EA/L;, i.e. the product of
Young’s modulus E and cross-sectional area A, divided by the element
length L;,, and 6’ is the angle the bars make with the horizontal, after defor-
mation.
39
Tension Structures. Form and behaviour
Figure 3.1 Two-element structure. Vertical load.
Further manipulation of eqn (3.1) gives
P =2Ke,, ¥
2K (8+)
Sich Ge
(3.2)
Li8 +h)
y@+ hy +02
ig un is
= 2K(1 - horn =2K/5+h
which shows that the relationship between the load P and the displacement 5
is non-linear.
It is now possible to show under what conditions the load-displacement
relationship becomes linear. Further manipulation of the bracketed term
gives
d4h- A tD.
VE + 25h +I +
(3.3)
, a-12
=54n— ln + 0), 25h + 8
Vitae | + +E
Using the binomial expansion of the term in square brackets, and noting, that
(Li)? =I? + 0°, the right-hand side of eqn (3.3) becomes
1
Any
wo+h-@+h[1- (26h+35) +...)
a
=—s
CP
40
Geometrically non-linear behaviour. Solutions by commonly used numerical methods
to the first order in 5. The substitution of expression (3.4) in eqn (3.2) gives
P
P=2K——s8 (3.5)
(Lin)
which describes a linear load-displacement relationship, since h? /(Lj,)° is a
constant).
The example illustrates the point that, for large displacements, the load-
displacement relationship is non-linear, while for small displacements (suffi-
ciently small to allow the expansion (eqn 3.4) to be truncated after the first-
order term) it is linear.
The geometrically non-linear behaviour of structures can be solved by a
variety of numerical methods and techniques. The most common computa-
tional approaches are discussed in the next section.
3.2 Commonly used computational methods for the analysis
of geometrically non-linear behaviour
The most common, but distinctly different, numerical methods for the
solution of geometrically non-linear response of structures are
(i) the transient stiffness method
(ii) the force density method
(iii) the dynamic relaxation method.
In addition, there are non-linear gradient vector methodologies developed
by Buchholdt*" 7! for application to pre-stressed cable networks, which are
based on the minimization of the total potential energy of the system. These
include the method of steepest descent and the conjugate gradients method.
It has been found that these methods were less powerful than the Newton-
Raphson technique. However, the conjugate gradients method is currently
being used in conjunction with the force density method discussed in Section
34.
A description of each of the three methods listed above, together with a
brief evaluation of their advantages and drawbacks, is given in the following
sections.
3.3 Transient stiffness method
The method evolved from the conventional, small displacement theory,
which assumes a linear dependence of deflections upon forces in the
structure. The methodology is traced with the help of examples presented
below.
41
Tension Structures. Form and behaviour
3.3.1. Static analysis of skeletal, ‘linear’ structures
In the simplest case of a structure consisting of one element, as shown in
Big. 3.2(a), the load-displacement relationship can be described by a scalar
equation:
Ki=P (3.6)
a)
ca reo
—
y
2
Element of
cross-sectional
area A
Figure 3.2 (a) One-element structure, (b) two-element structure. Generalized load.
42
Geometrically non-linear behaviour. Solutions by commonly used numerical methods
where K is the axial stiffness, given as a force per unit length of the element,
and 4 happens to be equal to the elongation of the element. For an elastic
elongation, the stiffness K is equal to the elastic stiffness K- as in eqn (3.1).
The displacement of the structure is observed in local and global systems
of axes, which, in this case, can coincide.* With the stiffness K and applied
load P known, the displacement of the structure is uniquely defined.
For a slightly more complex structure, consisting of, say, two elements, as
shown in Fig. 3.2(b), the same load-displacement relationship may be true,
provided the displacements are small, i.e. when the difference between the
rotations @ and 6” is insignificant. However, even for this relatively simple
structure, it is no longer convenient, or indeed practical, to measure the
displacements along the lines of each element. Therefore, in addition to the
local axes, a global co-ordinate system is set up to measure the deflection 5 in
terms of its x°, y° and z° components in the Cartesian co-ordinate system.
These components are typically referred to as u, v, and w displacements,
respectively, which constitute the three ‘degrees of freedom.’ (In the example
under consideration the » component happens to be zero). Consequently,
everything is measured in terms of the x°, y° and 2° components,
becomes a vector of nodal displacements {6}, as in
{a)=| 0 (3.7)
w
the axial stiffness of each member is entered into a 3 x 3 global stiffness
matrix [K], as in
44,412, 13
UK] = | 21,420, 423 (3.8)
51,432, 433
and the external load is given as the load vector {P}, expressed in terms of its
x°, y°, and z° components at each node of the structure:
Pye
(P} = | Py (3.9)
Pro
“The global system of axes, denoted by x°, y°, 2°, and its orientation, are usually
independent of a structure’s geometry. The orientation of the local x, y, z system
varies, since one of the local axes is usually aligned with the direction of each struc-
tural member.
43
Tension Structures. Form and behaviour
Thus, for a more complex structure, the global stiffness matrix [K] is used to
relate the column vector of nodal displacements {6} to the external load
vector {P}, as in
[K]{6} = (P} (3.10)
Equation (3.10) represents a set of static equilibrium equations which has to
be satisfied at every node of the structure. The ‘nodes’ are certain character-
istic points of the structure, such as points of intersection of structural ele-
ments. For simplicity, the suffices indicating the node number (suffix j), and
the direction according to the Cartesian co-ordinates (suffix i), are omitted
from the formulation. The left-hand side of eqn (3.10) represents the internal
force vector, which has to balance the externally applied load vector {P}.
The coefficients ay;, 42... @in of the global stiffness matrix [K] carry the
dimension of force per unit length, and can be determined from experimental
measurement, but it is more common to calculate them using standard struc-
tural theories and algebraic manipulations. Such manipulations involve tri-
gonometric transformations of the local co-ordinate system into a global
system, using a transformation matrix constructed from direction cosines.
Once the transformations are completed, the displacements and internal
forces in the structure can be expressed in terms of their global x°, y®, and
2° components, rather than in terms of the local extensions and forces. The
transformations are simple but tedious, and not recommended for hand
calculation, particularly for structures with degrees of freedom greater
than 3.
The individual stiffness matrices for each member contribute to the forma-
tion of the global stiffness matrix. Where the members share a common node,
their stiffness is entered as a sum of the relevant coefficients in the global
stiffness matrix. The size of the stiffness matrix is determined by the number
of unknown nodal displacements. In the example illustrated in Fig. 3.2(b),
the displacement v and the y® component of the load vector are both equal to
zero, and hence [K] can be reduced to a 2 x 2 stiffness matrix.
The analytical procedure described above is known as the ‘stiffness matrix
method’. It is a method that features very strongly in modern structural
analysis. In essence, the method provides global stiffness matrix equations,
which describe the load-displacement relationship for each node of the
structure.
The main limitation of the stiffness matrix method is its inherent assump-
tion that the relationship between forces and displacements is linear, i.e. that
the structure displaces in proportion to the loads applied. With the initial
geometry of the structure known and the applied loads estimated, the static
analysis process is reduced to finding the unknown small displacements and
deformations. The internal forces in the structure are found from the stress~
strain relationship, i.e. Hooke’s law for the material. The analysis of such
44
Geometrically non-linear behaviour. Solutions by commonly used numerical methods
‘inear’ structures does not involve form-finding —the shape of the
structure is imposed at the outset and is assumed to change very little
under the applied loading
3.3.2 Static analysis of skeletal, ‘non-linear’ structures — why iterative
computations are necessary
The condition of static equilibrium described by eqn (3.10) cannot be directly
applied to structures which exhibit large displacements (a phenomenon
referred to as geometrically non-linear behaviour). With reference to the
example in Fig. 3.2(b), the problem of geometric non-linearity arises when
the rotations # and @’ are significantly different. In order to be able to use eqn
(3.10) for the case of geometric non-linearity, it is necessary to proceed with
the solution in a stepwise manner, as explained below.
If the deflections of a tension structure were to be calculated from eqn
(3.10) using just the initial stiffness matrix [K] as
(6) = [K""(P) (3.11)
then the condition of static equilibrium would clearly be violated, because
the displacement (6), being large, would alter the initial configuration of the
structure — the configuration for which the stiffness matrix [K] was origin-
ally calculated. Therefore, a new updated stiffness matrix would have to be
found, based on the new geometry. This situation triggers off the process of
correction of displacements and re-calculation of the stiffness matrix, as
explained below.
If k denotes an iterative step corresponding to the current geometry of the
structure, {X};, on which the calculation of the stiffness matrix (K}; is based,
then the displacement vector [6] is:
(8}41= IK IP} (3.12)
and the new geometry is
(Xe = (Xb thea (3.13)
If the displacement is large, the new stiffness matrix [K],,, multiplied by the
displacement vector found from eqn (3.12) would generate an internal load
vector, {P}, which does not balance (P}. Thus
Uhr Bhs (Phir (3.14)
The difference between the external load vector (P} and the internal vector
{P}, represents the out-of-balance force vector, or ‘residual’ {R}, as in
(Rhr= [0P] = (Pha (3.15)
45
Tension Structures. Form and vehaviour
The residual force vector yields a correction, or increment for the displace-
ment vector {6}, say {Ad}, as in
(Ab )cu1= DKA Reg (3.16)
This increment in the displacement vector is subsequently used to update the
geometry of the structure. Subsequently, a new stiffness matrix is calculated,
which, together with new residuals will generate a new increment of dis-
placements. This then sets up an iterative process of calculations, which
continues until the residuals are reduced to (almost) zero, ie. the static
equilibrium is reached.
Equation (3.14) represents a ‘transient form’ of the static equilibrium equa-
tions. The numerical procedure presented above is known as the ‘transient
stiffness method’ Accordingly, the stiffness matrix [K], is referred to as a
transient stiffness matrix or instantaneous stiffness matrix. Although the numer-
ical procedure is formulated in terms of the stiffness matrix changing with
each iteration, it has been found that the convergence of the numerical solu-
tion is improved by keeping [K] constant for a small number of consecutive
(iterative) steps.
The transient stiffness method relies on a linearization process of the non-
linear system of equilibrium equations and is critically dependent on the
assumption of small displacements.
3.3.3 Transient stiffness method applied to static analysis of tension
structures. Role of geometric stiffness
In the case of tension structures, the assumption of linear behaviour may be
valid, if the pre-stress forces are high and the applied loads are relatively
small. In general, such a relationship does not hold, and the non-linearity of
the force-displacement relationship, as evidenced by the dependence of the
stiffness matrix upon the displacement, requires iterative calculations
In order to model the behaviour of tensioned structures, the presence of
pre-stressing forces must be taken into account. This is achieved by means of
the geometric stiffness. The role of the geometric stiffness is best explained
with the help of a simple example.
Example
A structure shown in Fig. 3.3 consists of two cables pre-tensioned by the
force Ty. Due to symmetry, only half of the structure is shown. Each cable
has a pre-tensioned length L,,, and is subjected to the external load P, which
produces a displacement ¢, as shown. If the original, unstrained length of
each cable is L;, and the initial extension corresponding to the pretension
force T,, is ¢;, then
46
Geometrically non-linear behaviour. Solutions by commonly used numerical methods
8
Figure 3.3 Two-bar structure. Role of geometic stiffness.
AE
ee = (3.
Tem ™ (3.17)
ie. the product of the direct elastic stifiness EA/L;, and the extension of the
cable e%,.
When an external load P is applied, there is a further increment of member
tension AT,, and a corresponding extension ¢;,, Le.
a en tein) = Tn + AT n (3.18)
and hence
‘
Affn SAT, (3.19)
Due to symmetry, horizontal equilibrium is automatically satisfied and
hence only vertical equilibrium of the structure needs to be considered; thus
(Tm + Tm) , (3.20)
where Ls, is the current member length, given as Lh, = (Lyy+€°m) +
&, = Ly, + Gu Where L,, is the initial strained length.
Substituting eqn (3.19) into (3.20) and re-arranging terms gives
é as
pa (es tete lo (e+ Kee )e (3.21)
where K = T,,/L%, is defined as the geometric stiffness (explained below), and
Ki. is the direct elastic stiffness.
47
Tension Structures. Form and behaviour
The geometric stiffness allows one to express a change in the nodal force
components, arising from prestress and the altered geometry of the structure
given by the displacement 5. This change can be significant, even if very little
elastic straining took place. This is purely a geometric effect.
The structure shown in Fig. 3.3 is very simple, and together with eqn (3.21)
serves the purpose of illustrating the nature of the force-displacement rela-
tionship in pre-stressed structures. Due to the simplicity of the case consid-
ered, in which there is only one unknown displacement, both the geometric
and elastic stiffness can be represented in scalar form and calculated directly
from member properties. The application of the transient stiffness method to
multi-dimensional systems requires the force-displacement relationship to
be represented in the form of a global stiffness matrix comprising both
the elastic and geometric effects. A detailed exposition of the elastic and
geometric stiffness of cable (line) elements used in discretization of three-
dimensional surfaces, as originally proposed by Argyris,°*! is presented in
Section 7.3.1 of Chapter 7.
The transient stiffness method discussed so far relates to the static analysis
problems of tensioned cable nets/membranes and rigid structures exhibiting
geometrically non-linear behaviour. The method can also be applied to the
form-finding of tension structures, as shown in the next section.
3.3.4 Application of the transient stiffness method to form-finding of
tension structures
At the outset of the computational process of form-finding of tension struc-
tures, a crude initial structural shape is assumed, together with the values of
pre-stress forces in the surface. Initially, the structure is not in static equili-
brium, because the assumed shape is unlikely to be compatible with
the assumed forces in the structure. A simple cable structure, described
below, can illustrate the problem.
Example
A structure consisting of four cables with a pre-tensioned force T,, in each
cable is shown in Fig. 3.4. The initial ‘guessed’ shape of the structure does not
produce static equilibrium. Consequently, the correct shape has to be deter-
mined through finding the unknown co-ordinates of the internal node 5.
As a first step, the initial global stiffness matrix is calculated from the
assumed geometry. Subsequently, the tension force in each member is
resolved into their x°, y°, and z° components at the common node. The
sum of the components of the member forces produces the internal load
vector {P}. With reference to Fig. 3.4, it can be seen that the contribution of
any one member sharing a common node to the internal load vector is
48
Geometrically non-linear behaviour. Solutions by commonly used numerical methods
Yar
a) b)
Figure 3.4 A pre-tensioned cable structure: (a) General arrangement and (b) orientation
of members in global co-ordinates.
Ty, COSGy;, Where the suffix i= 1, 2, and 3, corresponds to the x°, y®, and 2°
global directions, respectively. Hence,
4
DH Tn C08 On
. [ee P, re
in=[t]-[B} & Tn 608 Ona (3.22)
Be Pp mi
ET 608 Ong
For static equilibrium to be satisfied, the right-hand side of eqn (3.22) must be
zero. Since no external load acts directly on node 5, the internal load vector
(P) constitutes the out-of-balance, or residual force vector (R} = (P). Once
this residual is defined, it is possible to proceed with the iterative compu-
tation, as in the case of static analysis. The residual force vector enables the
generation of incremental displacements {Ad} according to eqn (3.16).
Subsequently, the surface geometry can be modified, leading to a new stiff-
ness matrix for the structure. In summary, the iterative procedure for the
form-finding, process consists of the following steps:
(i) assumption of the initial geometry
(ii) calculation of the stiffness matrix (based on the assumed initial
geometry, but subsequently calculated from updated geometry)
(iii) calculation of the residual force vector as (Rha = {Pheu
(iv) calculation of the incremental displacement vector {A6) from eqn
(3.16)
(v) correction of surface geometry due to {Ad}
(vi) calculation of the new stiffness matrix and returning to step (iii).
49
Tension Structures. Form and vehaviour
In form-finding of stable minimal surfaces represented by line elements,
the pre-tension forces T,, remain constant. The process of form-finding
consists of an iterative adjustment of the initially assumed surface geome-
try, until the value of the out-of-balance force vector (residual) is reduced
to (almost) zero. The residual is equal to the internal load vector {P} calcu-
lated from the assumed tension field and current configuration of the
structure.
3.3.5 Evaluation of the transient stiffness method
The transient stiffness method (the instantaneous stiffness method) is
described in the work of Argyris, Siev, Haug, and others. 34: 35.36.37, 381
It was developed to facilitate form-finding and patterning of Munich
Olympic roofs'**! simultaneously with the force density method proposed
by Linkwitz.°*) It is possible to draw an analogy between the method of
transient stiffness matrix and the Newton-Raphson method 3) 37 30! for
the solution of systems of non-linear equations. Indeed, the transient stiffness
method is really a vector version (relating force to deflection) of the well-
known scalar Newton-Raphson method.
The finite element method and stiffness matrix approaches dominate mod-
ern structural analysis. Their success can be attributed wholly to the advent
of computers, as they are totally unsuited to hand calculations; even for small
systems of equations, numerous matrix manipulations have to be performed
to convert local element solutions to the global solution. For large systems, if
matrix inversion is used, the solution may be prone to divergence, or yield
useless results, due to the computational round-off errors. Round-off errors
are magnified through lengthy arithmetic operations and possible ill-condi
tioning of the stiffness matrix. Note, a matrix is said to be ill-conditioned if it
contains some coefficients which are orders of magnitude greater (or smaller)
than other coefficients. The problems likely to arise in the inversion of ill-
conditioned matrices are well known. These include ‘swamping’ of the
effects of small terms, or ‘loss of significance’ in the case of small differences
between large numbers containing too few figures to maintain accuracy.°"1!
Therefore, during the computation of the matrix inverse, round-off errors
caused by arithmetic operations on very small and very large numbers can
be disastrous. To mitigate round-off, techniques such as scaling of the stiff-
ness matrix"! 3"! are recommended, but they all add to the computational
effort. It is well-known? >"! that if the size of the matrix is nx 1, then the
total number of arithmetic operations required for matrix inversion (and
hence the computing time) is proportional to n°. It follows that for the
large-scale calculation required for tension structures, matrix inversion
should be avoided. Solution procedures which minimize the number of
arithmetic operations should be employed instead.
50
Geometrically non-linear behaviour. Solutions by commonty used numerical methods
Further problems with the transient stiffness method can be encountered,
because of the formulation of the element stiffness, which, as stated earlier,
assumes small displacements and small rigid body rotations of the structure.
In the case of form-finding, where gross changes of surface geometry may
take place in the initial stages of computation, the condition of small displa-
cements and rotations can only be fulfilled by scaling down the size of the
iterative step. The accuracy of the solution is affected by a possible fictitious
straining of elements, introduced by the fact that the direction cosines enter-
ing the stiffness matrix formulation ‘lag one iteration’ behind. This problem
is specific to the transient stiffness method and is examined in more detail in
Chapter 7, Section 7.3. Thus, it should be realized that the numerical
approaches relying on the formulation of the stiffness matrix as proposed
in Ref [3.3], and subsequently reproduced in many textbooks/$" $10 3141
have this limitation.
3.4 Force density method
The method of force density was developed in response to the need for
computational modelling of structures for the Munich Olympic complex.
The method uses a linear system of equations to model static equilibrium
of a pre-tensioned cable net under prescribed force/length ratios. Earlier
work due to Siev ef al." 5! also focused on the applicability of linear
systems of equations to modelling equilibrium states of non-linear systems,
such as pre-stressed cable nets. However, the solution to form-finding pro-
blems proposed there was dependent on a number of simplifying assump-
tions, such as a constant value of horizontal component of pre-tension force
in each cable, and the cables lying in vertical parallel planes, with the two
sets of planes perpendicular to each other. It was observed that with the pre-
tension in each cable assumed constant, the system of equilibrium equations
was linear with respect to the unknown displacements in the vertical direc-
tion. The resulting shapes of pre-stressed networks were, of course, restricted
by the assumptions made in order to acquire the solution.
The force density method, originally proposed by Linkwitz and reported
in references [3.9, 3.15-3.18] is less restrictive than that proposed by Siev. The
method relies on an ingenious mathematical assumption that the ratio of
tension force to length of each cable can be constant. This transforms a
system of non-linear equations to a set of linear equations that, in principle,
could be solved directly. However, due to the size of the matrix and its
sparsity, the formulation does require the use of indirect, iterative methods
of solution, such as the method of conjugate gradients.)
At this point it is worth noting that the form-finding process modelled by
the force density method does not equate with finding shapes of stable
oe
Tension Structures. Form and behaviour
minimal surface membranes; it simply allows one to generate shapes of
tension structures that are in static equilibrium, The method, however, has
the potential to be developed into a numerical tool for finding stable minimal
surfaces, as discussed in Section 3.4.4
The principles of the force density method are illustrated with the help of
the following example.
3.4.1 Application of the force density method
The structure shown in Fig. 3.4 can be viewed as a branch of cables extracted
from a larger network. The equation of equilibrium of forces at node 5 can be
arrived at by resolving the tension forces T,, of the connecting members into
the x°, y®, and z° global components. This is achieved simply by multiplying
T,, by the direction cosines, defined as the ratios of the member lengths
PFOjectioNS Lys, Lmy, and Ly,z to the actual lengths L,. Since each member
m is defined by two end nodes i and k, the respective direction cosines are
(3.23)
In the current example, m = 1, 2,3, and 4, Hence, the equilibrium of forces at
node 5 is given by the following system of equations:
Ti@t 38) , T8 ~ 38) | TsQ5 = 28), Tal = 38)
Ly Lb 1 Ly
Tay = 5), Taly8 — ys) , Ta(yd — ys)
+ + <4 (3.24)
Lp ts im
28 — 28) | To(24 —
a
where Py, Py, Py» are the components of the external load vector acting at
node 5.
In the above system of equations, the member lengths L,, (m = 1,...4) are
non-linear functions of the co-ordinates of points (nodes), which define the
members. The equations form the basis of the direct approach reported in
reference [3.17], which subsequently led to the development of the force
density method. By introducing constant values of tension coefficients, or
force densities qn, defined as a ratio of member force to member length —
namely qn, = T»:/Ly, — the system of equations becomes linear:
52
Geometrically non-linear behaviour. Solutions by commonly used numerical methods
quad = 38) + qolx8 — x8) + qa(ax§ — x8) + gard — 28) = Pro
guy — ¥8) + aaly3 — y8) + 43(8 — Ys) + Ga(Ys — 5) = Pye (3.25)
ule} — 28) + qa(2 — 28) + 93(23 — 25) + qal2a — 28
Equation (3.25) can be expanded to include the remaining branches of a
larger structure, and take into account nodal connectivity, as well as
known co-ordinates of the fixed (boundary) points."1°*"8! The resulting
system of linear equations can be solved for the unknown co-ordinates of
the network directly,” as illustrated by the next example.
3.4.2 Numerical example
A simple structure is to be created from four pre-tensioned cables (Fig. 3.5).
‘The co-ordinates of the anchorage points of each cable are known, but the
final configuration of the structure that satisfies static equilibrium is not.
Therefore, the form-finding problem is reduced to the question of, where
do the four cables meet? For simplicity, the co-ordinates of the anchorage
points are given in Fig. 3.5 as non-dimensional integers.
It is possible to find the unknown co-ordinates of joint 5 from the system of
equations given by eqn (3.25), if values for force density are assumed.
Equating the external loads Py, Py, and to P» zero, and re-arranging
terms, gives
qi +42 + 43+ a)¥8 + 41X1 + 4223 + 43x3 + uxt = 0 (3.26)
and similarly for the remaining co-ordinates and y$ and 28.
Assuming, for simplicity, a constant value of force density for all branches
of the network to be equal to, say 1, leads to
4x8 -12+34+4+1)=0
4y3 -10+34+4+1)=0 (3.27)
428-15 +14+14+1)=0
which results in the co-ordinates of joint 5 to be 2.5, 2.25, and 2.0 units.
It can be seen that the unknown co-ordinates of the structure, calculated by
the force density method are simply a function of assumed force densities. In
general, if the value of q,, increases or decreases by the same amount, no
change in the co-ordinates of the structure would result. Hence, in order to
achieve an alternative configuration of the network, different values of force
densities have to be prescribed for each branch, or cable. This allows the
generation of a range of three-dimensional shapes, giving the designer
“The reader should verify that when this full set of equations is written down, there
are always enough equations to solve for the unknown co-ordinates,
Tension Structures. Form and behaviour
Node 4 = (1, 1, 1)
Figure 3.5 A simple form of cable structure.
scope for improvement of the initial concept of the structural form. A typical
value of force density used for all inner cables is one, and a value inversely
proportional to the cable length is assigned for boundary cables, when such
cables have irregular lengths.!°'® +"!
It is clear that unequal lengths of cables (elements) give unequal forces in
them, if a constant value of force density is used. Therefore, if a tension
structure is to have a constant tension field, the co-ordinates calculated by
the force density method would have to be such that the lengths of the
branches remain equal. Hence, as noted earlier, the method cannot be used
directly to find minimal surface membranes for which the condition of
constant value of force, rather than force density, would have to be pre-
served in the computation.
3.4.3 Matrix formulation of the force density method
For the purpose of computer calculation, the system of equations given by
eqn (3.25) needs to be represented in a matrix form. As a first step, one can
observe that the projected lengths of members [px Lynye NG Lyy2 Which enter
the eqn (3.23) can be expressed using the connectivity matrix [C] and the
nodal co-ordinates, as in
54
Geometrically non-linear behaviour. Solutions by commonty used numerical methods
Figure 3.6 Network branch.
-u{*} = 1c)
F
oye =[ -{% | =(CIY} (3.28)
fz =U = : | =(CHZ}
For the network of cables shown in Fig. 3.6, the connectivity matrix is con-
structed in such a way as to clearly indicate which node numbers belong to
which members. Thus, entering the node numbers i, k along the horizontal,
and the member numbers along the vertical, gives connectivity matrix [C],
shown in Fig. 3.7.
m
Figure 3.7 Connectivity matrix, (C].
@
a
Tension Structures. Form and behaviour
Hence, with reference to Fig. 3.7, the projected lengths of members in the x
direction can be expressed as
ae eee cel xf x8
Ix {_]o 100 -1}fxe[_|e-2
,,,rt~zr—S:sCdCsCssc 6.29)
is 0001 -1f{x¥ e—8
and similarly in the y and z directions, giving the general form shown in eqn
(3.28):
(Linx) = [CHX}
{Ling} = [CHY} (3.30)
{Lz} = [CHZ}
The x, y and z components of internal forces Quix, Qmys Qnz in cable members
can be expressed as a product of force densities Q and projected member
lengths, which in matrix notation give
[Qn] = [Q]Lmed
[Qhy] = [QLny) (3.31)
[Que] = [QH Linz}
where [Q] is a diagonal matrix of force densities
a :
(=| ° 2 A (3.32)
%
The equilibrium of forces at each node is given by the sum of the x, y and z
components of internal forces Q,, in members connecting to the node, which
must balance the external load vector {P} acting at the nodes of the structure.
Hence
Yn = Pre
YX Qny = Pye (3.33)
ae
Substituting for Qwns, Qmyr Qnz from eqns (3.31) and (3.30), and noting that the
summation in eqn (3.33) can be carried out by pre-multiplying the internal
force components Qn, Qny, and Qn by ICI", leads to the matrix form of
eqn (3.33) as follows:
56
Geometrically non-linear behaviour. Solutions by commonly used numerical methods
(CTQICHX) = Pv
[CH TQICIY) = Py ey
(CH LQUCKZ} = P-»
One can verify this result by considering equilibrium in the x direction
only, of the five nodes present in the cable network shown in Fig. 3.5:
1 0 0 0
Of 0 ot. ae Pre
{cy OIC aq 0 7 6 Geet
0 00 1), 8 3% a
i a a dG 35 Pao
(3.35)
The equilibrium equations in the remaining directions can be expanded in a
similar manner.
3.44 Evaluation of the force density method
The force density method can be used to generate, quite effectively, the initial
shapes of cable nets and membranes. The method requires only the co-ordi-
nates of the boundary points and values of the force densities to be specified,
and research has shown that trivial values of force densities, such as 1,
produce reasonable results. $171
The method can be developed to satisfy the condition of constant pre-
stress and any other additional constraints, such as the preservation of rec-
tangular or equidistant meshes in the structure. Such requirements have
already led to the development of a non-linear force density method,
which involves additional theoretical formulations" >"! and iterative pro-
cedures. Nevertheless, even in its original formulation, as presented here, the
method plays an important role in facilitating the design process of tension
structures.
3.5 Dynamic relaxation method
Unlike the previous two methods, the method of dynamic relaxation does
not have to rely on matrix manipulations for the solution of the system of
non-linear equilibrium equations. The very origins of the method can be
traced to Sir Richard Southwell," who developed a relaxation method
for the solution of partial differential equations via finite difference approx-
imations. The method, intended for hand calculation, was, and still is, con-
ceptually appealing and straightforward. Its development into the dynamic
relaxation method is due to Otter,'>?"! who, in 1964, carried out an analytical
57
Tension Structures. Form and tehaviour
investigation of complex pre-stressed concrete nuclear vessels. A year later,
the method was applied by Day’?! to the analysis of portal frames. Its first
application to static analysis of cable networks is due to Day and Bunce!*?*!
in 1970. Since then the method has gone through various stages of develop-
ment and it is now widely recognized that its application to modelling of pre-
stressed cable nets and membranes is very successful. For this reason, the
method has been adopted in this book as the main numerical technique for
the form-finding and static analysis of tension structures. The full description
and evaluation of the dynamic relaxation method is given in Chapter 4.
3.6 Computational static analysis versus form-finding
3.6.1 Out-of-balance forces in static analysis and in form-finding
In the case of static analysis, the structure is assumed to be initially in equili-
brium, which means that the internal load vector (P} is zero. The out-of-
balance forces arise as a result of the externally applied loads {P}, which
disturb the equilibrium. The difference between the two types of load con-
stitutes the out-of-balance force vector in the structure. Both the geometric
and elastic stiffness have to be used to determine the internal forces, to reflect
the initial pre-stressed state and subsequent elastic straining of the structure
due to the externally applied loads. The final surface geometry is that for
which {R} = {P} — (P} is zero.
In the case of form-finding, the out-of-balance forces arise as a result of an
assumed geometry, which is unlikely to be compatible with the force dis-
tribution assumed for the structure. The force distribution represents a ten-
sion field set at some pre-defined level, which should not be exceeded during
the life-span of the structure. For all the nodes other than the support nodes,
the out-of balance force vector is equal to the internal load vector {P}, calcu-
lated from the tension field using current configuration of the surface. At the
boundary, static equilibrium is satisfied by equating the internal force vec-
tors to the boundary forces. The final configuration of the surface is that for
which {R} = {P} is (almos’) zero at all internal nodes.
3.6.2 Elastic and geometric effects in static analysis and in form-finding
Unlike the static analysis stage, the computational form-finding process does
not require the elastic effects to be included. The basic reasons for this state-
ment are as follows:
(i) Since the only applied load is pre-tension, it is sufficient to resolve the
tension forces at each node and proceed to relax these during the
58
Geometrically non-linear behaviour. Solutions by commonly used numerical methods
iterative adjustment of the geometry of the structure, until static equi-
librium is reached.
(ii) The inclusion of elastic effects (straining) in form-finding is possible,
but this (explained with a help of a cable structure), will have the
following consequences:
e lack of control over the values of the cable forces, which will vary,
and may ultimately exceed the specified safe, or permissible load
levels
necessity for adjustments of the unstrained cable lengths, in order to
maintain the required tension levels in the structure (and prevent
problems stated above)
necessity for further iterations, in order to restore static equilibrium,
which gets violated by the adjustment of unstrained lengths of
cables.
The procedure thus described is tedious, involving iterations within itera-
tions. Consequently, the inclusion of elastic straining is not recommended for
form-finding of tension structures. Elastic effects are normally considered at
the stages of patterning and static analysis.
For reasons of simplicity, much of the discussion concerning computa-
tional modelling of tension structures has concentrated on pre-stressed
cable nets. However, cable or line elements may be used to approximate
membrane surfaces, and this is discussed further in Chapter 7.
Consequently, computational procedures, adopted in the form-finding and
analysis of pre-stressed cable nets, also apply to tensioned fabric structures
(membranes).
References
[3.1]. BuchHotpr, H. A. (1968). The analysis of cable nets. Journ. Inst. Math
Applics., 4, 339-358.
3.2]. Buchinouor, H. A. and McMitay, B. (1973). A non-linear vector method for
the analysis of vertically and laterally loaded cable assemblies. Proceedings of the
Institution of Civil Engineers, 55, 211-228.
(3.3). Arcyris, J. H. and Scriarpr, D. W. (1972). Large deflection analysis of pre-
stressed networks. Proceedings ASCE, Journal of the Structural Division, ST3, 633-
654.
13.4]. Arcyris, J. H., ANcELoroutos, T. and Bicuat, B. (1974). A general method for
the shape finding of lightweight tension structures. Computer Methods in Applied
Mechanics and Engineering, 3, 135-149.
13.5]. Suv, A. (1963). A general analysis of prestressed nets. International
Association of Bridge and Structural Engineering, 3, 283-292.
[3.6]. Stev, A. and E1eiman, J. (1964). Stress analysis of prestressed suspended
roofs. Proceedings ASCE, Journal of the Structural Division, ST4, 103-121.
59
Tension Structures. Form and behaviour
[3.7]. Hau, E. and Powstt, G. (1971). Analytical shape finding for cable nets. Proc.
TASS Symposium, Part II on Tension Structures and Space Frames, 83-92.
[3.8]. BroucHton, P. and Noumsaro, P. (1994). The Analysis of Cable and Catenary
Structures. Thomas Telford.
(3.9]. Linewitz, K. and Scuek, H. J. (1972). A New Method of Analysis of Prestressed
Cable Networks and Its Use on the Roofs of the Olympic Game Facilities at Munich.
IABSE, Amsterdam.
[3.10]. Leonarn, J. W. (1985). Tension Structures. Behaviour and Analysis. McGraw-
Hill, New York.
[3.11]. Crrapra, S. C. and Canate, R. P. (1985). Numerical Methods for Engineers, 2nd
edn, McGraw-Hill.
[3.12]. Wiuxinson, J. H. and Reiscu, C. (1971). Linear Algebra. Handbook for
Automatic Computation. Springer, Berlin.
[3.13]. Fox, L. (1964). An Introduction to Numerical Linear Algebra. Clarendon Press,
Oxford.
[3.14]. Meek, J. L. (1991). Coinputer Methods in Structural Analysis. E.&F.N. Spon.
[3.15]. Linxwitz, K. and Scrtk, H. J. (1971). Einige Bemerkungen zur Berechnung
von vorgespannten Seilnetzkonstruktionen. Ingenieur - Archiv. 40, 145-158.
(3.16). Scuirx, H. J. (1974). The force density method for form-finding and com-
putation of general networks. Computer Methods in Applied Mechanics and
Engineering, 3, 15-134.
[3.17]. Linxwrrz, K. (1999). Formfinding by the direct approach and pertinent
strategies for the conceptual design of prepressed and hanging structures.
International Journal of Space Structures, 14, No. 2, 73-87.
[3.18]. Linkwrrz, K. (1999). About formfinding of double-curved structures
Engineering Structures, 21, 709-718.
[3.19]. Sincer, P. (1994). Analogies between minimal surfaces and membrane
constructions (numerical part). Natiirliche Konstruktionen, SFB 230, Part 9, 107-111.
[3.20]. Soutuwett, R. V. (1946). Relaxation Methods in Theoretical Physics. Oxford
University Press.
[3.21]. Orrer, J. H. R. (1964). Computations for prestressed concrete reactor pres-
sure vessels using dynamic relaxation. Nuclear Structural Engineering, 1, 61-75.
(3.22]. Day, A. S. (1965). An introduction to dynamic relaxation. The Engineer.
Technical Contributors Section, 220-221.
[3.23]. Day, A. 8. and Bunce, J. H. (1970). Analysis of cable networks by dynamic
relaxation. Civil Engineering and Public Works Review, 383-386.
60
4
Dynamic relaxation method
The method of dynamic relaxation in its early stages of development was
perceived as a numerical, finite difference technique. It was first used to
analyze shell structures," then skeletal and cable structures," *"! and
plates.!"® 4191
The method relies on a discretized continuum in which the mass of the
structure is assumed to be concentrated (lumped) at given points (nodes)
on the surface (Fig. 4-1). The system of lumped masses oscillates about the
equilibrium position under the influence of out-of-balance forces. With
time, it comes to rest under the influence of ‘damping’. The iterative
scheme reflects a process, in which static equilibrium of the system is
achieved by simulating a pseudo-dynamic process in time. In its original
form, the method makes use of viscous damping, as described in the
following section,
yy
WY
iy
Wr
I
i
y
A
Ao,
iy
WY
SN
SS
y
_
N
CN
“>
WS
SS
KS
\
S \
ZZ
\
KX)
\
Figure 4.1 Discretized continuum.
61
Tension Structures. Form and behaviour
4.1 Dynamic relaxation method with viscous damping
The equation from which the method has originated is the equation of
motion, which, for a discretized system is
Py = {= Ké] +My, + CB, (4.1)
where subscript ji refers to the jth node in the ith direction in a discretized
system, Pj; is the vector of external loads, [> Ki]; is the vector of internal
loads (with K representing stiffness and 5 displacements), C is the coefficient
of viscous damping, and 4,,4 are the vectors of nodal accelerations and
velocities, respectively.
Introducing the nodal residual forces, Rj;, as the difference between the
external P,j and internal P;; force vectors, gives
R= Pi - [DO Ks},
- (4.2)
= Pi — Pi
Hence, from eqn (4.1):
Ry = Mjid,; + C8 (4.3)
iO
Equation (4.3) states that the motion of a system is produced by the out-of-
balance forces. Equation (4.2) shows that static equilibrium of the system
requires these forces to come to zero.
Equation (4.3) can be approximated by centred finite differences, in which
the acceleration term is represented by the variation of velocities over the
time interval At, and the velocity term as an average over the same inter-
val.2""| Thus, with 1 denoting the time interval at which variables are
calculated, the residual forces at time increment nAt are given by
std | ant
or + a
Ri = Ma CD (4)
Equation (4.4) gives the recurrence equation for velocities:
My _C
ia Ri
it AE i
MC +m, ,t (4.5)
py oe =
The velocities are then used to predict displacements at time +1:
itt = 6h + dy" Ar (4.6)
The iterative process consists of a repetitive use of eqns (4.5) and (4.6); it
is a process that continues until the residual forces are close to zero. The
62
Dynamic relaxation method
residuals are calculated from eqn (4.2), which, in the iterative scheme,
takes the form
Ri=P- [DY xs |
= Pj — (Pil""
4.1.1 Stability of the iterative solution
In order to use the iterative scheme presented above, it is necessary to
make assumptions regarding the values of masses, damping, coefficients,
and the time increment. Since the objective is not to follow the actual
motion of a real structure but to determine the position of its static equili-
brium, the values of the masses and damping coefficients can be chosen on
the grounds of convenience. The following is a summary of results given in
Ref. [4.11]
Both the differential equation (4.1) and difference equation (4.4) should
have the values of masses M and damping C, so chosen as to ensure that
the recurrence scheme does indeed converge to the static equilibrium. For
linear problems, the stability of the iterative scheme depends on the values of
At, K and M defined earlier, and in particular on /411, the largest eigenvalue
of the matrix M"'K. For stability:
es
Ate (4.8)
To minimize computation time, a value close to this limit (but not too close)
should be used. In practice this limit is not known, but if M is chosen as a
diagonal matrix whose elements are « times those of the leading diagonal of
the stiffness matrix K then 2/a is a near upper bound on j;. With 4; * 2/a,
the maximum time increment for stable iteration is
Mmae % V20 = py (4.9)
The time increment can be chosen arbitrarily, because the problem is not
considered in real time. If At is taken as unity, the ratio M/K is equal to
1/2. Choosing a =} gives 1; ~ 4 and a stability limit of At ~ 1 from eqn
(48), Clearly, At =1 is a convenient choice, and since the upper bound is
approximate and the actual problem is non-linear, a value of « larger than }
would ensure At = 1 to be safely within the limit. An alternative derivation
of this same stability limit can be found in Ref. [4.8].
Although the analysis of the stability of the dynamic relaxation algorithm
is couched in terms of the stiffness matrix of the structure, this has been done
63
Tension Structures. Form and behaviour
simply for the convenience of exposition. Thus, for an arbitrarily chosen
value of At, the mass at any node should be set to comply with eqn (4.9): ie.
APK ji
Mi = z (4.10)
2
The stability criterion can also be derived by considering a motion of a string
of particles/nodes moving parallel to the principal stiffness direction, as
shown in Fig. 4.2. Of all possible configurations for a given number of
nodes, this particular one would give maximum stiffness and hence the
highest frequency of oscillations. Noting that it is the high frequency of the
system that governs numerical stability, the chosen configuration covers the
most critical state from which the condition of stability can be deduced. The
nodes have constant value of mass, and the stiffness of the springs connect-
ing them is identical for each spring. Hence, with Mj =m, and Ky =k, the
equations of motion are
My = Kya — Xp2) + (Ky = ya)
MX = K(X p= Xp) + Kn41 — Xn) (4.11)
mae = Ke — a) + ps2 — Xny)
which in matrix form are
10 0) e 2-10 07 Px 0
FAM a (OU) ee Pe Se
C0 Iie 21 Ola 0 (4.12)
——
K
jut,
The solution to the above system of equations is x =e!
differentiation and substitution to eqn (4.12) gives
2
E - if =0 (4.13)
For a non-trivial solution for ¢ the determinant of the matrix of coefficients
must be zero. Hence
2
aw|x as 1 =0 (4.14)
i (wy (n¥1) i
Figure 4.2 A simple mass-spring system.
¢, which on
64
Dynamic relaxation method
Substituting for K gives:
-1 |=0 (4.15)
or
Thus «* = 2k/m, or w = /2k/m, where @ is the frequency of oscillations.
The period of oscillation T is therefore
T =2n/o
- = Bm 4.16)
Vhs Vag
To obtain a time increment for the integration of the equation of motion it is
necessary to choose a value that is significantly less than T; indeed, less than
T/2, to be able to capture the amplitude of the oscillation. Clearly, a time
increment of at most /(2m/k) would achieve this, thus confirming the result
quoted earlier (eqn (4.91)).
4.1.2 Critical viscous damping coefficient
The solution cannot be achieved without the value of the viscous damping
coefficient. In an undamped mode, the structure will oscillate about its posi-
tion of equilibrium, as shown in Fig, 4.3(a). If N denotes the number of
iterations required to complete one cycle of oscillations in a fundamental
mode, then the viscous damping coefficient, known as critical damping,
can be found from
C = 4amf (4.17)
where f = 1/NAt is the fundamental frequency of oscillation. The result is
derived in Appendix III.
It can now be seen that in order to obtain the value of the viscous damping
coefficient, an additional computer run is necessary, with C set to zero. The
resulting undamped oscillations of the structure can then be used to calculate
the value of the critical viscous damping coefficient from eqn (4.17).
Subsequently, the iterative process outlined by eqns (4.7), (4.5), and (4.6)
may commence.
65
Tension Structures. Form and behaviour
a)
2 Undamped
5 ‘oscillations
: (fundamental mode)
2
a
Number of
iterations
Underdamped
oscillations
Static Aquiliprium
Overdamped oscillations
Critically damped oscillations
Number of
iterations
Figure 4.3 Oscillations of displacements in dynamic relaxation algorithm (viscous damp-
ing), (a) undamped and (b) damped.
Figure 4.3(b) shows the solution for the case of critical damping based on
the lowest natural frequency of the system. If the damping coefficient is
below this value, the solution may overshoot static equilibrium, before set-
tling down to convergence, and the structure is said to be ‘underdamped’.
This situation is preferred to the case of an ‘overdamped’ solution, in which
the convergence may proceed at a very low pace.
The requirement for a two-stage solution procedure involving the deter-
mination of the viscous damping coefficient is rather inconvenient. For this
66
Dynamic relaxation method
reason the method has been superseded by the dynamic relaxation technique
with kinetic damping
4.2 Dynamic relaxation method with kinetic damping
When the technique of kinetic damping is employed, the viscous damping
coefficient is taken as zero. The system is brought to rest by following a
process of stopping the iterations, whenever a peak in kinetic energy of
the entire system is detected, and then restarting the computation from the
current configuration, but with zero initial velocity.“°+* #17! During the
iterations, the velocities and the displacements get smaller, as the residual
forces become smaller over a period of time. Hence, the peaks in kinetic
energy gradually become less pronounced and eventually the whole system
settles down to static equilibrium, at which the residual forces are (almost)
zero (Fig, 4.4).
The method of damping described above relies on the observation that, in
simple harmonic motion, maximum kinetic energy is achieved in a config-
uration that corresponds to minimum potential energy. The motion of a
pendulum illustrates this principle. Of course, for a pendulum oscillating
in air, fluid-damping brings it to rest in its position of minimum potential
energy.
The pendulum concept can be extended to a more complex structure,
modelled as a multi-dimensional system of nodal (lumped) masses. Under
the influence of loading, the nodes oscillate about their positions of equili-
brium. The movement of the structure is mapped by the successive iterations
within the dynamic relaxation algorithm. The pendulum analogy shows that
stopping that movement (iterations) at the points of maximum kinetic energy
Kinetic energy
Number of iterations
Figure 4.4 Variation in kinetic energy in dynamic relaxation algorithm.
67
Tension Structures. Form and behaviour
is equivalent to approximating the stable equilibrium position of the overall
system. The term ‘approximating the stable equilibrium’ is used, because the
frequency of the oscillations of individual nodes varies, and, therefore, it is
not possible to achieve true overall equilibrium by stopping the oscillations
after the first kinetic energy peak. The repetitive use of the procedure even-
tually produces the stable equilibrium configuration of the structure.
With the viscous damping coefficient equal to zero, eqn (4.3) gives
Ry = Mjdj; (4.18)
which, in centred finite difference form, is
grt a at
Ri = M24 (4.19)
At
Consequently, the recurrence equations for velocities and displacements are
(4.20)
and
ot! = 8h + état (4.21)
Implementing the numerical stability criterion given by eqn (4.8), and setting
Af to 1, simplifies the recurrence equations immensely; namely
ait = = (a i} +e (4.22)
and
art = aa xt (4.23)
4.2.1 Iterative process
Equations (4.7), (4.22), and (4.23) form an iterative loop of the dynamic
relaxation algorithm with kinetic damping. At a kinetic energy peak, velo-
cities are set to zero and the whole system is restarted from the current
configuration. It can be deduced that the kinetic energy peak has occurred
when the current value of the kinetic energy is smaller than that ina previous
iteration. With the iterative process punctuated by discrete time intervals Af,
the precise location of the point at which a maximum value of kinetic energy
has occurred is not known, but it can be estimated. It is important to do so, in
order to correct the displacements, as these would have been calculated after
a kinetic energy peak has occurred. A procedure for estimating the point of
maximum kinetic energy and correction for displacements is outlined next.
68
Dynamic relaxation method
4.2.1.1 Location of the point of maximum kinetic energy: correction for
displacements
At the end of each iteration, the kinetic energy of the whole system needs to
be computed and compared with that from the previous iteration. The trace
of the kinetic energy curve indicates a quadratic variation with the number of
iterations, particularly over a small period of time. Hence, if the point at
which the kinetic energy peak has occurred is denoted by f*, it is reason-
able to assume that it will lie on a quadratic curve passing through points
KE), KEx, and KEs, which denote the energy levels of the system at x1, x2, and
x3 separated by the time interval At.
Thus, with reference to Fig. 4.5, the quadratic polynomial ax” + bx +.¢ =
P(x) passes through the points KF;, KEz, and KE3, and has a maximum at
max _ _/2a,
Atx=0, P(0) =c = KE
atx = At, P(At) =aAP + bAt+c = KEy
atx=2At — P(2AL) = 4aAf? + 2bAt +c = KE3.
Solving the above set for unknown coefficients gives
1
SypilKEs ~ 2KEs + KE]
saqlKE> —3KE, — KE)
KE,
ar ‘At
-3
139 t ot tart
Figure 4.5 Location of the point of maximum kinetic energy in dynamic relaxation
algorithm.
69
Tension Structures. Form and behaviour
from which
_ 4KEy — 3KE. ~ KE;
KE — 2KEp + KEy
ee »since Af =1
It is now possible to find the offset from time t, ie. BAL, or B, as
At mat _ 3, 4KE> — 3KE, — KE
Fa oe —_f™ =- 4+
6 ae qt KE3 — 2KE) + KE;
___KE3~KE,
~ KE; — 2KE; + KE;
and calculate the corrected displacements at f”"* as
(n+1)—cort git) tet) xn
a = 6 — Pat — paras
Substituting for é** from eqn (4.22) and noting At = 1, gives
girtlimcorr gine) _ + p30? (4.24)
As stated earlier, the iterative process consists of a repetitive use of eqns (4.7),
(4.22), and (4.23). At a kinetic energy peak, the displacements are calculated
according to eqn (4.24), but otherwise, eqn (4.23) is used.
4.2.2 Application of the dynamic relaxation method with kinetic damping
to static analysis of tension cable nets
The principle of the application of the method to static analysis problems can
be explained using a simple example of a cable net structure, such as the one
shown in Fig. 4.6. In this case, the internal force vector, P;; can be calculated
0.4m oa m
ff 7
Figure 4.6 Simple net.
70
Dynamic relaxation method
from the known tension field by summing up the respective x, y, and z
components of tension forces in members connected to the given node.
Thus, with reference to eqn (4.7), the residual force vector at any stage of
iteration is
4
Riu = Pi — D> Tomy (4.25)
In this very simple example, there is only one residual force, acting in the
z direction (i = 3), at node j = 3, which represents a difference between the
applied load P33 and the z component of the resultant tension force from
members m = 1 to 4. Hence, R35 = P33 — (Tips + Tiays3 + Tras + Tusa). For a
more complex structure, the same calculation would be carried out for each
node and each direction, which shows that the computational effort is pro-
portional to the number of degrees of freedom in the structure.
As stated in Chapter 3 (Section 3.3.3), and in Chapter 7, the stiffness of each
cable m is represented by two components — namely, the geometric stiffness
C — T,,/L%,, and the elastic stiffness K&, = (EA),,/L%,, where T,, is the tension
force in member m, LS, and L, are the current and initial lengths of members
respectively, and EA is the usual elastic constant.
In order to ‘drive’ the dynamic relaxation algorithm, the stiffness of mem-
bers has to be ‘lumped’ to the nodes. The contribution of each connecting
member to the lumped stiffness of the connecting node is given as a sum of
its elastic and geometric stiffness divided by 2, as there are two end nodes to
each member. Thus
K= ; (Ke; + Kw) (4.26)
in which suffix mj denotes the member connected to the node j. The total
lumped stiffness of the node is })K; taken over the number of elements
connecting to node j.
The numerical procedure consists of a repetitive use of eqn (4.25) and then
eqns (4.22), and (4.23/4.24). As indicated by eqn (4.22), the lumped stiffness
is to be resolved into x, y, and z directions, giving values Kj, Kj, and Kj
respectively. However, in order to ensure numerical stability, the highest
value of the nodal stiffness Kj; should be used and it is therefore recom-
mended that the resolution of the nodal stiffness into i= 1, 2, 3 directions,
respectively, should be exercised only if the system is strongly convergent.
It can be seen that, in this case, the nodal stiffness term, K; (or Kj), can be
obtained by direct calculation without the assembly of the stiffness matrix for
each element and for the whole structure, as would be the case with the
transient stiffness method described in Chapter 3. Here, the stiffness term
acts as a scaling factor on the size of the iterative step, as shown by eqn (4.22).
oe
Tension Structures. Form and behaviour
The application of the dynamic relaxation method to form-finding follows
the same numerical process, with the external load vector Pj; set to zero and
the internal load vector calculated from the initially assumed tension field, as
explained in Chapter 3, Section 3.6.1. In the case of membrane structures, the
calculation of the stiffness of the elements may be a little involved, if surface
elements, rather than line elements, are chosen to represent the surface. The
topic of surface discretization is discussed in detail in Chapter 7.
Before proceeding with the evaluation of the dynamic relaxation method,
it is interesting to see how viscous and kinetic damping techniques perform
relative to each other, and how they compare, in terms of computational
effort, to the method of transient stiffness.
4.3 Efficiency of the dynamic relaxation relative to the
transient stiffness method
Both the dynamic relaxation algorithm and the transient stiffness method
were programmed to analyse the non-linear static response of pre-stressed
cable nets. Study of the efficiency of the algorithms was carried out on six
structures attached to rigid boundaries, as shown in Figs 4.6-4.11. In all
cases, computations were stopped when the vector of out-of-balance forces
was reduced to 0.1% of its original value.
4.3.1 Simple net
This very simple cable structure, shown in Fig. 4.6, has zero curvature and only
three degrees of freedom, which are the x, y, and z components of displace-
ments of node 3. The cross-sectional area of cables is 0.785mm? and Young's
modulus is 124.8 kN/mm*. The pre-tension force in both cables is 0.2 KN. The
external load P3 (in the z direction) of 0.015 kN is applied in the centre.
4.3.2 (2 x 1) cable net
This structure, also analysed by Buchholdt,''"! is a flat net with six degrees
of freedom, as shown in Fig. 4.7. The pre-tensioned force in all cables is 0.5
KN. The cross-sectional area of cables is 2.0 mm? and their Young’s modulus
is 110 KN/mm’. Load Ps of 0.2 KN acts at nodes 3 and 6.
43,3 (2 x 2) cable net
The structure is shown in Fig. 4.8. Material properties and the value of pre-
tension force in the cable net are the same as in Example 4.3.1. The structure
has 12 degrees of freedom and is subjected to the external load P3 of 0.015 kN
at nodes 4, 5, and 8.
72
Dynamic relaxation method
A Ly
Figure 4.8 (2x2) cable net
43.4 Hypar net
Two sets of straight line cables generate a model of a hyperbolic paraboloid
surface, shown in Fig. 4.9. The structure has 36 degrees of freedom. Load P3
of 0.0157 KN is applied at all internal nodes, except nodes 17, 21, and 22. The
Figure 4.9 Hypar net.
7
Tension Structures. Form and behaviour
remaining data, concerning the material properties and the values of the pre-
tension force, are the same as in Example 4.3.3. Previous analysis and experi-
mental measurements of this same structure are reported in Ref. [4.7].
4.3.5 Spatial net
The structure shown in Fig. 4.10 has 45 degrees of freedom. Its initial geo-
metry is generated using a pre-tension force of 90 KN in the x direction,
(except for the centre cable where it is 120 KN), a 30 KN in the y direction,
plus a point load P; =4.8 kN at all free nodes. Under these initial load
conditions, the plan dimensions of the structure are as shown in Fig, 4.10,
with the values of z co-ordinates, in metres, as follows:
nodes 1, 2,3 1.0000 2.0000 3.0000
nodes 6,7, 8,9 0.0000 0.8195 1.4096 1.6769
nodes 13, 14,15,16 0.0000 0.6870 1.1478 1.3176
Figure 4.10 Spatial net.
The symmetry of the initial configuration about the x and y centre axes is
maintained. The structure is subjected to a further increase in load by P; =2
KN at all free nodes. The cross-sectional area of cables is assumed to be 350
mm” in the x direction and 120 mm? in the y direction. The elastic modulus is
160 KN/mm?,
This example was previously analysed by Szabo and Kollar/*™"! except for
one difference: the cross-sectional area of the centre cable (cable 13-19) was
taken by Szabé and Kollar as 450 mm? rather than 350 mm_. The spatial net is
used as a case study in Chapter 5, which examines the effects of differential
pre-stressing on the behaviour of the structure.
lata)
74
Dynamic relaxation method
43.6 Saddle net
The structure shown in Fig. 4.11 has 142 members and 189 degrees of free-
dom. The saddle shape of the structure has full symmetry about the x and y
axes. The initial shape was generated by fitting smooth curves to the end
boundaries along the x direction, which had a rise in the centre (nodes 5 and
91) of 1.2 m. The same exercise was repeated along the y direction, giving a
sag, in the centre (node 48) of 1.133 m relative to nodes 5 and 91.
The horizontal component of the pre-tension force in the x and y directions
is 60 KN, the cross-sectional area of cables is 306 mm’, and their elastic
modulus is 147 kN/mm?. The external loads P; and P}, of 1kKN each, act
on half of the structure, as shown by the shaded area in Fig. 4.11.
Figure 4.11 Saddle net.
4.3.7 Results
Deformation analysis of pre-stressed cable nets carried out by the transient
stiffness and dynamic relaxation algorithms produced results that are in
excellent agreement with each other and with other published data [Refs
4.13, 4.14]. However, in the case of the saddle net (with 189 degrees of free-
dom), the transient stiffness algorithm did not produce a converged solution.
Hence only the results from the dynamic relaxation method are given in this
case. The results are presented in Figs 4.12, 4.13, and Table 4.1.
75
Tension Structures. Form and behaviour
3
Number of iterations
o
6
: X Example 4.31
A. Example 4.32
4 D Example 4.33,
Vy Example 4.34
: ® Example 4.35
08 09 1.0 11 je 8
i
Figure 4.12 Plot of of number of iterations versus p, the weighting factor.
—--=" Transient stiffness
Dynamic relaxation:
—2— viscous damping d
o--- kiretic damping h
CPU time: secs
8
2.0
10
05:
02
Degrees of freedom
O41
1 3 6 12 36 45 189
Figure 4.13 Comparison of the efficiency of methods.
76
Dynamic relaxation method
43,8 Discussion
It can be seen that the transient stiffness algorithm requires considerably
fewer iterations than the dynamic relaxation method. The speed of
convergence of the former can be improved by the use of scaling factors
p applied to displacements at any iterative step. Values of p can be found
by trial and error. In the six examples presented, values between 0.9 and
1.0 gave savings in the number of iterations required, as shown in
Fig. 4.12.
The efficiency of each numerical method is observed in terms of the total
CPU time required for the solution to a given limit of accuracy (Fig. 4.13,
Table 4.1). This depends directly on the total number of iterations and the
CPU time per iteration. The latter is a reflection of the complexity of the
numerical algorithm.
In terms of the total CPU time, the efficiency of the transient stiffness
method is much worse than that of the dynamic relaxation algorithm, except
for the very simple cases, such as those given in Examples 4.3.1-4.3.3. On the
whole, a disproportionate amount of time is spent on solution of the linear
equations by matrix inversion. The program used a routine based on Crout’s
decomposition with partial pivoting. The results confirmed that the total
number of arithmetic operations and the time used by the matrix inversion
routine was proportional to 1°, 1 being the order of the global stiffness matrix
K (Refs [4.15, 4.16).
The accuracy of the computed inverse depends on the conditioning of the
original matrix, which is poor in the case of the saddle net, and hence
responsible for the lack of convergence. In physical terms, the resulting inac-
curacies in the matrix inverse imply that the nodal displacements and the
nodal forces are not related correctly. Numerical ill-conditioning, could be
overcome by the introduction of a diagonal scaling matrix, suggested by
Buchholdt/#"9! or by the use of more sophisticated routines producing
results correct to full machine accuracy, by employing successive corrected
approximations to the inverse.*7°! These, however, would increase the com-
putational effort even further.
The dynamic relaxation algorithm showed not only a lower total CPU
time to convergence, but also a considerably lower CPU time per itera-
tion,*7! compared to the transient stiffness algorithm. In the specific case
of the saddle net structure, the total CPU time used by the dynamic
relaxation algorithm amounted to just a fraction of the time the transient
stiffness method needed to perform one iteration. The viscous damping
technique proved to be the most efficient in terms of the total CPU time
required for convergence, but its two-stage analysis, in real time, took
considerably longer than the solution reached by the kinetic damping
technique (Table 4.1).
77
Suidurep sneuTy
unpuosye uogexepes orueud,
Sudurep snoosi,,
unyIOZTe ssauysHs quarsues |,
suis 0Spp yoo.
ceor #10 67E 02'€t 060°0 797 _ O9T - 68L JU ZIPPPS “OCF
092 ss0'0 6EL Ose £c0'0 cel st ele = ld youyeneds “cep
£e'8 700 £9e we 1200 92 862 eel 7 — puiedsy PEP
cet 9100 SFL L401 $600°0 ell 99°0 8910 r a you aque (CX 7) “ECP
190 9100 6f o¢0 9800°0 ge “FO £900 Z = yu aqqeo (1 XZ) TEP
leo £9000 FF 610 9S00'0 ve elo £P00 © € yu aidwig “Tet
S aU § ATONLION SUOALIDN $:9WY sUMOReIE sUONLIE}! s :9WA s:UORLION sUOAeIaI WOpdoly aydurexg
nd aad jorou Add sad jo ou nad aod jo‘ou jo saaiZap
TOL PUN AdD = [OL Top ewy dd TeI0L, TRoL ewH Add TOL Jo ON,
ayy fo Rounlfy “TF 2190
78
Dynamic relaxation method
4.4 Evaluation of the dynamic relaxation method
The method relies on successive relaxation of the out-of-balance forces at the
nodes of the structure. The effects of the variations of force/displacement
in time and variation of the same force/displacement in space can be
decoupled.
The numerical model is built on the assumption that the state of static
equilibrium is a consequence of a pseudo-dynamic state. This is sometimes
mistakenly called the D’Alembert principle. The only resemblance the
method has with the D’Alembert principle is the statical appearance of the
dynamic equations of motion. The difference lies in the fact that the
algorithm does not use ‘forces of inertia’ as external forces acting on the
structure, [17 4181
The dynamic relaxation method makes use of the so-called lumped stiff-
ness, ie. the stiffness which is apportioned to each node of the structure. It
can be seen from the recurrence equations (eqn (4.22)) that the lumped stiff-
ness scales the size of the iterative step.
The main advantage of the method is a small number of arithmetic opera-
tions needed at any one time, since the computations are concerned with one
node in turn, rather than all nodes simultaneously. Such an approach mini-
mizes computational round-off errors, and contributes to stability and accu-
racy of the numerical solution.
The dynamic relaxation method shows higher efficiency, in terms of the
total CPU time required for convergence, than the transient stiffness solution.
The latter is characterized by a comparatively high value of CPU time per
iteration, although fewer iterations are needed.
Experience has shown that the numerical stability criterion for the
dynamic relaxation method is robust, provided the largest direct stiffness
of the connecting elements is used to ensure as small as possible size of
the iterative step. The criterion is based on the assumption of constant
mass and stiffness. A derivation of a stability criterion based on variable
lumped mass and stiffness would be an advantage, and this subject merits
further study. On the whole, the dynamic relaxation method is stable and
capable of providing, solutions to highly non-linear problems, even if the
criteria of constant mass and stiffness are not met. However, to ensure fast
convergence and stability of iterations, it is recommended that the difference
in nodal stiffness throughout the structure is kept small. This can be achieved
by an appropriate surface discretization, involving the same, or similar,
number of elements connecting to each node of the structure. The topic of
surface discretization is discussed in Chapter 7.
aa
Tension Structures. Form and behaviour
References
[4.1]. Orrer, J. H. R. (1964). Computations for prestressed concrete reactor
pressure vssels using dynamic relaxation. Nuclear Structural Engineering, 1,
61-75.
[4.2]. Day, A. S. (1965). An introduction to dynamic relaxation. The Engineer,
Technical Contributors Section, 220-221.
[4.3]. Day, A. S. and Bunce, J. H. (1970) Analysis of cable networks by dynamic
relaxation. Civil Engineering and Public Works Review, 383-386.
[4.4]. Barnes, M. R. (1974). Dynamic relaxation analysis of tension networks. Proc.
Int. Conf. Tension Roof Structures, London.
[4.5]. Lewis, W. J., Jones, M. . and RusHTon, K. (1984). Dynamic relaxation analysis
of the non-linear static response of pretensioned cable roofs. Computers and
Structures, 18, No. 6, 989-997.
[4.6]. Bares, M. R. and Wakerietp, D. (1984). Dynamic relaxation applied to
interactive form-finding and analysis of air-supported structures. Proceedings
of Conference on the Design of Air-supported Structures. 1. Struct. E., Bristol,
147-161.
[4.7]. Lewis, W. J. (1989). The efficiency of numerical methods for the analysis of
prestressed nets and pin-jointed frame structures. Computers and Structures, 33,
No. 3, 791-800.
[4.8]. Barnes, M. R. (1994). Form and stress engineering of tension structures.
Structural Engineering Review, 6, No. 3-4, 175-202.
[4.9]. Rusttton, K. R. (1968). Dynamic relaxation solution of elastic plate problems.
J. Strain Analysis, 3, No. 1, 23-32.
14.10]. Rusitron, K. R. (1969). Dynamic relaxation solution for the large deflection
of plates with specified boundary stresses. J. Strain Analysis, 4, No. 2, 75-80.
[4.11]. Brew, J. §. and Brorron, D. M. (1971). Non-linear structural analysis by
dynamic relaxation. International Journal for Numerical Methods in Engineering, 3,
463-483.
[4.12]. Cua, P. A. (1976). Explicit finite difference methods in geomechanics.
Proceedings of E. F. Conference on the Numerical Methods in Geomechan
Blacksburg, VA.
[4.13]. Bucunowor, H. A. (1985). An Introduction to Cable Roof Structures.
Cambridge University Press.
[4.14]. Szav6, J. and Kotak, L. (1984). Structural Design of Cable Suspended Roofs.
Ellis Horwood.
[4.15]. Wiixinson, J. H. and Reinscu, C. (1971). Linear Algebra. Handbook for
Automatic Computation, Vol. 2. Springer, Berlin.
[4.16]. Fox, L. (1964). An Introduction to Numerical Linear Algebra. Clarendon Press,
Oxford.
[4.17]. Banacu, S. (1951). Mechanics. Translated by E. J. Scott. Monografie
Matematyczne, Tom XXIV. Nakladem —_Polskiego — Towarzystwa
Matematycznego z Subwengji Ministerstwa Szkél Wysszych i Nauki,
Warszawa — Wroclaw.
[4.18]. Butten, K. E. (1965). An Introduction to the Theory of Mechanics. Cambridge
University Press
80
5
Case studies of cable roof structures.
Design issues: form-finding and patterning
5.1 Introduction
Deformation and stress analyses of several examples of cable net structures
were presented in Chapter 4, assuming that the initial shape of each structure
was known. It is important to note, however, that in general, static analysis of
tension structures has to be preceded by the form-finding stage, perhaps the
most crucial stage in design. In the case of Examples 4.3.1-4.3.4, presented in
Chapter 4, the form-finding process was unnecessary, as the initial shape of
each structure either lied in a flat plane surface, or was generated by straight
lines (e.g. hypar net). The remaining examples, for which form-finding and
patterning issues were not trivial, are selected for case studies discussed in
detail later in this chapter.
The simplest shape that can be produced in a tension structure is a flat
plane. Flat planes satisfy the condition of zero mean curvature at every point
and, therefore, are a special case of a minimal surface. They are not really a
good choice for a structural form, as their lateral stiffness is small (compared
to a surface curved in space) and, in order to limit deflections, very high pre-
tension forces would have to be applied. As an illustration, one can consider
a case of a nearly horizontal cable, as opposed to a cable with a certain degree
of sag. Both cables are tensioned by the same load, but develop different
levels of tensions, as shown in Fig. 5.1. The nearly horizontal cable (shown on
top) accommodates the load by generating very high tension forces. These
forces would tend to infinity if the cable, after loading, remained horizontal.
The bottom cable, with a greater initial sag in it, accommodates the applied
load much more easily, with lower tension forces. In short, the initial shape
of the cable plays an important role in load transfer, and cables adopting
nearly horizontal (‘flat’) configurations are structurally inefficient. This very
simple principle is sometimes ignored in the design of some cable structures,
and the London Millennium Bridge is an example of that (discussed further
in Chapter 6, Section 6.4.1).
81
Tension Structures. Form and behaviour
TT
P
Figure 5.1 Illustration of load transfer by a nearly horizontal (top) cable and a sagging
(bottom) cable.
Similar considerations of load transfer apply to flat, surface stressed mem-
branes. The recommended form for 3D tension cable nets and membranes
are anticlastic, or saddle shapes characterized by negative Gaussian curva-
ture: namely (1/R; x 1/R:) <0, where R, and Rj are the radii of principal
curvature.
In Chapter 2, a case was made for adopting minimal surface shapes as an
optimal structural form for tension structures. Minimal surfaces are either
plane, or saddle shaped. As saddle shapes, they have negative Gaussian
curvature, but also possess a geometric property 1/r) = —1/rz, ie. equal
and opposite curvatures at every point, or zero mean curvature:
3(1/r + 1/r2) = 0, where directions 1 and 2 are orthogonal to each other.
It can be shown that a necessary and sufficient condition for a flexible
membrane to be a minimal surface, i.e. one with zero mean curvature, is
that the tension field is isotropic, ie. T; = T, = T, and that then T is constant
over the surface. The linking of a minimal surface to a constant tension field
in a membrane has been developed into an effective method of form-finding,
as shown in the following sections of this chapter and in Chapter 7.
One of the non-planar (warped shaped) cable net structures presented in
Chapter 4 was a ‘hypar’ net (Fig. 4.9). As is well known, such a surface can be
generated by a set of straight lines, which run at 45 degrees to principal
curvatures. I'he mean curvature of the surface is not zero, except at the
origin, and therefore, the hypar is of a minimal surface. However, it is
possible to demonstrate that for a small warp, the minimal surface can be
approximated by a hyperbolic paraboloid.*"! Another interesting observa-
tion that can be made with regard to the two surfaces is as follows. While
hypars are characterized by as series of straight lines at 45 degrees to the line
of principal curvature, minimal surfaces have a set of two straight lines
present at such locations
Hypar surfaces are easy to construct, and, therefore, a good choice for a
structural form, not only for tension cable net and membranes, but also for
rigid structures (e.g. cooling towers).
As stated in Chapter 2, there exists a tendency to dictate shapes of tension
structures by applying uneven tensioning. This is largely motivated by the
82
Case studies of cable roof structures. Design issues: form-finding and patterning
need to control displacements and obtain the required curvatures, without
resorting to changes in boundary configurations. In addition, some designers
may assume a structural form of a tension structure, failing to appreciate the
need for form-finding. A ‘wrongly’ assumed initial shape may result in
changes in the actual geometry of the structure, when it is built.
Subsequently, the behaviour of the structure under imposed loads may
change significantly. Uneven pre-tensioning and ‘wrongly’ assumed initial
shapes of structures are just different aspects of one problem: ‘form-dictat-
ing’. The consequences of this are examined using three case studies, pre-
sented below.
5.2 Case studies
5.2.1 Spatial net
The structure studied in this case is the spatial net previously presented in
Chapter 4, Fig, 4.10, Section 4.3.5. The shape of the structure is controlled not
only by the boundary configurations, but also by the initial tensions /loading.
The initial equilibrium state is generated by uneven tensioning (described in
4.3.5) and vertical point loads P3, equal to 4.8 kN at all free nodes. The
boundary of the structure projects as a rectangle of 24 m x 16 m on plan.
The structure has two horizontal boundaries along the y direction and two
“v-shape’ boundaries along the x (Figs 4.10 and 5.2). The initial geometry of
to 203 4s
y 2? —
8 9 [ pa 2
qt ts | :
ea ll
} i
20h i 123° | F 26
| !
27 2B
— Initial shape (sag 5%, rise 10.5%)
Form-found shape (sag 6.75%, rise 8.6%)
Figure 5.2 Geometry of the geodesic net (lowest boundary points (nodes 3 and 9) at 3.0m).
83
Tension Structures. Form and behaviour
Table 5.1 Geometry of spatial net (see Fig. 5.3)
Form-found geometry of the Geometry of the
geodesic net differentially stressed net
Displacements
from the initial Configuration Initial
configuration: mm after form-finding: m configuration: m
Node
No. oy x y z x y z
i 33.3. 923 —41 4.0333 4.0923 0.8154 4.0000 4.0000 0.8195
8 61.6 180.3 100.1 8.0616 4.1803 1.5097 8.0000 4.0000 1.4096
9 0.0 241.2 203.2 12.0000 4.2412 1.8801 12.0000 4.0000 1.6769
14 443 0.0 626 4.0443 8.0000 0.7496 4.0000 8.0000 0.6870
15 784 0.0 208.1 8.0784 8.0000 1.3559 8.0000 8.0000 1.1478
16 0.0 0.0 306.0 12.0000 8.0000 1.6236 12.0000 8.0000 1.3176
the structure is given in the second part of Table 5.1 under ‘differentially
stressed net’, and in 4.3.
It is interesting to compare the behaviour of the same spatial net structure,
but with its initial geometry governed by a constant tension field. The struc~
ture can then be referred to as a ‘minimal net’, or a ‘geodesic net’.
5.2.1.1 Geometry of the geodesic net and differentially stressed net
The shape of the ‘minimal net’ is generated using a form-finding procedure
outlined in Chapter 3, in which all tension forces are set to a constant value.
The initial surface configuration, prior to form-finding, is identical to that of
the differentially stressed net spanning the same boundaries, in which the
cables follow straight lines on plan, as can be seen from Table 5.1. The
differentially stressed spatial net has the same initial tension field as in
Section 4.3.5, Chapter 4.
Looking at the results presented in Table 5.1, the first observation that can
be made is that the cables with constant tensions do not follow a regular grid
on plan. Instead, they form lines known as geodesics (lines of minimum
distance over the curved surface). This is illustrated in Fig. 5.2, but in
order to make the change in the plan view of the structure visible, the x, y
displacements are drawn to an exaggerated scale, approximately 4 times
larger than that used to :epresent the overall structural dimensions.
As will be shown in Chapter 7, the points of a geodesic net lie on a stable
minimal (soap-film) surface, and hence the geodesic net represents a discrete
model of such a surface. Therefore, much of a discussion of the behaviour of
the geodesic net also applies to stable minimal surface membranes.
84
Case studies of cable roof structures. Design issues: form-finding and patterning
Centre line profiles along x axis: m
04} Se
8
12.
184}
24:
Centre line profiles along y axis: m
o 4 8 12 16
Differentially stressed net
Geodesic net
Figure 5.3 Spatial net. Results of form-finding.
Figure 5.3 shows curvature profiles of the geodesic and differentially
stressed nets, respectively. It can be seen that under permanent load (initial
tension), the curvature profiles for the geodesic net look ‘good’ in both cases.
However, the same cannot be said about the differentially stressed net — the
structure develops ‘flat’ areas, which, for a continuous (membrane) structure,
could lead to problems with drainage of rain and snow.
It is worth examining the behaviour of the two types of structures under
imposed loading.
5.2.1.2 Behaviour of the geodesic and differentially stressed nets under imposed
loading
Two load cases are considered:
# Load Case 1, consisting of vertical load
¢ Load Case 2, simulating wind action.
In the case of the geodesic net, three levels of pre-tension are used: 63 KN, 85
KN, and 95 kN, respectively. This does not alter the form-found configura-
tion of the geodesic net, because the tension field is constant and the bound-
aries of the structure remain unaltered. The pre-tension of 63 KN corresponds
to an average initial tension in the differentially stressed net.
Tension Structures. Form and behaviour
The performance of each structure is going to be judged from the point of
view of:
(a) surface curvatures under permanent and imposed loads
(b) the amount of in-plane distortion that may affect design tolerances on
the fixing of cladding
(c) tension field in the structure.
Displacements of the structure are also considered, but it is worth emphasiz-
ing that they are not the most important criterion for judging the perfor-
mance of a flexible, tension structure,
Load Case 1 — uniform vertical load
Both the geodesic and the differentially stressed nets are subjected to vertical
point loads P; = 2KN at all unconstrained nodes. The cross-sectional area of
cables in the geodesic net is taken as 229 mm? (an average of cross-sectional
area of all cables in the differentially stressed net). The cross-sectional area of
cables in the differentially stressed net is 120 mm? along the y direction, and
350 mm? along the x direction.
The results of the static analysis for Load Case 1 are given in Table 5.2. It
can be seen that the geodesic net exhibits higher values of displacements
than the differentially stressed net. This is true for all nodes, except node
16 (centre node). The largest differences occur at the pre-tension level of 63
KN. For higher levels of pre-tension, ie. 85 KN and 95 KN, the displacements
are reduced, but, on the whole, they are still greater than those observed in
the differentially stressed net.
Surface curvatures (Load Case 1)
Curvature profiles due to displacements from Load Case 1 are not given,
because they are almost identical to those in Fig. 5.3, due to small displace-
ments, as shown in Table 5.2.
It ig interesting to examine the results of this load case in terms of
variation of z displacements with pre-tension. Figure 5.4 shows the results.
Because of symmetry, only a quarter of the structure is represented.
Displacements are shown for the geodesic net, and those corresponding
to the differentially stressed net are given at the extreme end of the
graph. It can be seen that imposing high level of pre-tension in the geodesic
net to control displacements is futile; very high levels of pre-tension would
have to be imposed to approximate the level of displacements observed in
the differentially stressed net. In fact, an increase in pre-tension would
improve the situation only for some nodes in the structure; for others,
such as nodes 9 and 16, the magnitude of z displacement would actually
increase with pre-tension.
86
Case studies of cable roof structures. Design issues: form-finding and patterning
gst 00 00 ool oo 600 £6 00 §=600 06 oo = 00 OL
got 00 €1- sz 00 | Le orez OO cc. 8'eZ OO tc. SL
zee 00 6c- see 00 0c. s'se oo ¥E- a ee +1
te <0. 00 zo 0 ce 00 sz oo = 00 6
ost = ZL 17 Ol cu. 0 sz- sie Gh oc. 8
zz 90 er 90 oi TIE ¥S- Use 70 75. Z
= A - z A z 7 4 a x ON
2pON
uowsuay-aud NY 6 uorstiay-ard NPT 6g woisuay-oud NY £9
wu :squowiaoedsiq,
you passans Ayenuasayyiq
uur sspramenedsiq
y2U (2{sapoa%) uolsua} UEsUO
po] [HLA wuOfiuNn — [ asv> pvoT mod syusuarnjdsiq, ZG aq,
Tension Structures. Form and behaviour
Pre-tension: kN
60 65 70 75 80 85 90 95
(os - —_
oo a
Eo, ——___+__.
g I © [= node7
2 20) .—_____+—* Fe nodes
—_—_ E
8 25- Se node 9
$30 a node 14
3 35 [enna 15)
“40 [ornode
45
Figure 5.4 Variation of displacements with pre-tension for the geodesic net — Load Case
1. Displacements for the differentialy stressed net shown on the right-hand side of the
graph.
In-plane distortions (Load Case 1)
When examining surface distortions, it can be seen from the results pre-
sented in Table 5.3 that the magnitudes of cable extensions for the geodesic
net and differentially stressed net are similar. In the first case, the range is
from —1.4 mm to +1.5 mm, and in the second, from —1.4 mm to +1,2 mm.
Therefore, should cladding be attached to the structure, the required allow-
ances for movement in the supporting cables would be similar.
Tension field (Load Case 1)
As shown by the results of load analysis presented in Table 5.3, the tension
field in the geodesic net ‘s much more uniform (51.0 kN to 76.3 KN in Case
(), compared to the range of 23.7 KN to 138.1 KN for the differentially
stressed net.
Assuming the breaking strength of cables of 1800 x 10 °kN/mm? (Refs
[5.2]15.5]), the calculated breaking loads are 412 kN for the geodesic net
and 216 kN and 630 KN for the differentially stressed net, for cables along
the y and x directions, respectively.
Tensions developing in the geodesic net are between 12.4% and 14.2% of
the breaking load for the hogging cables (y direction) and 17.6-18.5% for the
sagging cables. In the case of the differentially stressed net, these values are
lower: 11-12.8% of the breaking load for the hogging cables, and around 17%
for the sagging cables, with the exception of the centre cable, for which the
ratio is 21%. On the whole, the differentially stressed net does not utilize its
strength as well as the geodesic net. Similar observations can be made with
respect to the next load case, described below.
88
Case studies of cable roof structures. Design issues: form-finding and patterning
BIL (sor'0zt) 90°91 “1 06€°901 LLL96 zIs'eZ 91S
srt (€62'0¢1) FES 9EL 1 €SC901 76°96 P86'S2 SIF
SUL (sez) sco'gel orl 898°901 8sv'Z6 e0€'9Z Fel
HO (10z'06) 90Z°FOL Sot ozr'e01 9FL'€6 299722
90'L (26°06) 919°S01 Il z9'€01 366'€6 867%
60 (69816) z28°901 orl ZS0F0L €8e'6
ss'0- (zoe) ze6'st Zv0- 6CL'88 9PL6L zg6°85
$60- (66 Le) F6T'LT 09°0— F6T'88 SILL 9264S
€c1- (90°08) £99°e% €wI- vers 6L6 EL asv'is
“i (eze08) ozs'ez se1- FEES oze'ez 6860S
oso- (1008) rooLZ Ig0- LL0'68 66°82 SSS FIL
1s 0- (1e0'0e) 00922 ss0- 196'88 ore RL sess “A
aru :woTsuayg Na NYG ese) WU sMOFSUERKG NA G6 NA G8 NEO argeD
‘Mosua}a1g — SUOISUDL (mM asey — asey (ase
wui93 passays ATTeHUEIIzIC uxi03 (219p0a8) uorsua} yue}SUC>
1 asu3 peo] — jau poyeds ut suotsuazxa puv $9210
£8 aL,
89
Tension Structures. Form and behaviour
Load Case 2
In this load analysis, both types of structures are subjected to loads that
broadly simulate wind action. In the case of the geodesic net, only one
level of pre-tension (63 KN) is considered, which, as stated earlier, corre-
sponds to an average initial tension in the differentially stressed net.
The following, wind pressure distributions are given for a saddle shape
surface,°*! assuming that the whole area of the structure is subjected to
suction, with the following distribution of pressure coefficients:
-0.1 for nodes 6-12
-04 for centre nodes 13-19
ue for nodes 20-26
A severe, but not unrealistic wind pressure of 2 kN/m? is assumed, and with
each node taking the pressure from an area of approximately 16 m’, this
produces concentrated loads acting normal to the surface as follows:
2x 16 x (—0.1) = —3.2 kN for nodes 6-12
2 16 x (—0.4) = —12.8 KN for nodes 13-19
2 x 16 x (-0.3) = —9.6 KN for nodes 20-26
The loads are resolved according, to surface normals. Noting that cables
meeting at a node divide the surface into four quadrants (four surfaces
surrounding the node), a normal at a point is taken as a resultant of the
four surface normals, one from each plane. For each quadrant, a surface
normal is found by taking a vector product of two vectors aligned with
two sides of a quadrant, as shown in Fig. 5.5. Repeating the calculation
around the node and taking the average of four vector products, gives an
average surface normal at a given node. The results of the above calculations
are compiled in Table 5.4.
WL
Figure 5.5 Surface normal found as an average of four vector products, one from each
quadrant.
90
Case studies of cable roof structures. Design issues: form-finding and patterning
ve- 61 00 Z0Z60- e100 oo Fe St 00 6é60- o19t'0 00 &
s6- OT OT Zé860- Og0r0 96010 s6- 80 £1 S9860- 68400 zeeT0 wz
vo- FO LT Le860- BEND ELT 6- SDS SCdT@RGU- Ss HLEVO=—SFRTO itd
£UI- 00 00 1g660- oo = 000 ZZI- SSS 660~ 00 00 91
LzI- 00 =O T66'0- oo = eso, ZZI- DFT ROGO~ oo sor sI
ene sl 0686'°0— 00 SLL O ee 00 ld 6£86'0— 00 PSOLO tL
re- 90- 00 zoze0- — eLoz0- oo Te sO 00 6460- o19T'0- 00 6
Ze- €0- «£07860 OSUT'U- G00 TE- = OS FO g98GO- © 6BLU- Ss aeTO 8
Te- T0- 90 Zege0- seev0- ZELTO «~TE- = TO-—Ss 9'0—sze60- ~—FLEDO- -—-9FBT-O L
2 he z A x z fi x z A x “ON
pon
NX :pLoy payddy sjeurs0U a2vjang NX :peo payddy sjeuiou aeyng
you passaxys AypeUaII;zIq,
(uoysua}-01d NY €9) 39U1 91S9p095
Z asvD poor] — you jouwds #¢ ayquy,
91
Tension Structures. Form and behaviour
Table 5.5 Displacements of spatial net — Load Case 2
Geodesic net (63 kN pre-tension) Differentially stressed net
Displacements: mm Displacements: mum
Node
No. x y z x y z
7 203 05 113.5 157 23-884
8 67 18 43.5 52 38-2968
9 0.0 73 13.7 OO 119 23.1
4 35.6 18 267.6 274 20 © -2373
15 10.5 28 146.2 79 37-1341
16 0.0 36 -72.3 0.0 34-972
2 326 73 204.3 347 86 = 218.1
22 12.7 8.0 re 13.1 10.5 115.0
23 0.0 3.29 —26.4 00 -17 -73.0
The results of the load analysis (taking advantage of symmetry), are given
in Tables 5.5 and 5.6. What is interesting to see is that the magnitude of
displacements exhibited by the geodesic net is, overall, lower than that for
the differentially stressed form. However, as stated earlier, it is important to
compare the surface curvatures, surface distortions, and the tension field,
when judging the performance of the structures.
Surface curvatures (Load Case 2)
The displaced shapes of the geodesic and differentially stressed nets are
presented in Fig. 5.6. Again, as was the case with Load Case 1, the differen-
tially stressed net developed undesirable ‘flat’ areas that could potentially
be a problem, if vertical load was subsequently applied, causing (in a clad
structure), ‘ponding’ of rain water, or snow.
The curvature profiles in the geodesic net, however, look very sound, as
confirmed by the centre lines profiles in Fig. 5.6.
In-plane distortions (Load Case 2)
With reference to Table 5.5, it can be seen that both the geodesic net and the
differentially stressed structure experience extensions less than 1 mm. This
may seem surprising in view of the relatively large displacements, approach-
ing, in places, 200-300 mm (Table 5.5). In terms of magnitude of extensions,
comparable values can be found for both structures, but there is a marked
difference in the case of cable 6-12. For this particular cable, the geodesic net
shows a reduction in the lengths of cable elements 6-7, 7-8, 8-9 (and, due to
92
Table 5.6 Forces and cable extensions in spatial net — Load Case 2
Case studies of cable roof structures. Design issues: form-finding and patterning
Geodesic net (63 kN pre-tension)
Differentially stressed net
Cable Tensions: Percent Extension: Tensions: Percent Pre- Extension:
KN breaking = mm kN breaking tension: = mm
load load* kN
@ Q @) @ © ” ®) @)
1-7 129.118 Gli! 0.73925 65.140 30.1 30.031 0.73218
714 129102 313 0.70510 65.269 30.2 -30.016 0.73483
14-21 128.971 ee 0.70370 65.156 30.1 30.016 0.73249
21-27 129.223 314 0.74041 65.087 30.1. «30.031 «0.73107
2-8 125.756 305 0.72098 69.171 32.0 30.325 0.81806
8415 125.585 30.5 0.65293 68.822 31.9 30.064 0.80919
15-22 125.450 30.4 0.65158 68.721 318 30.064 0.80708
22-28 125.668 0.71996 68.706 31.8 30.325 0.80826
39 93411 22.7 0.36408 50.570 23.4 31.599 (0.41629
9-16 93.143 22.6 0.30995 49.350 «22.8 = 30.121 0.40222
16-23 93.065 22.6 0.30914 49.300 «22.8 = 30.325 0.40115
23-29 93428 22.7 0.36429 49.435 «22.9 30.064 (0.39139
67 54.688, 13.3 —0.9338 73.109 11.6 91.869 -0.13678
7-8 55.078 134 -08840 72330 115 90.974 -0.13461
8-9 55.388, 13.4 —0.8220 71.364 113 90.201 -0.13485
13-14 19.610 47 —0.48709 36.735 5.8 121.757 —0.61619
14-15 19.009 46 — -0.48978 35.136 5.6 120.793 —0.61588
15-16 18.530 45 —0.47708 33.792 54 120.108 +—0.61710
20-21 32.347 78 0.34434 31.232 5.0 91.869 -0.44212
21-22 32.406 79 — -0.34140 30.302 48 90.974 -0.43806
2-23 32.454 79 ~0.32983 29.290 4.6 90.201 —0.43605
* Breaking load for the geodesic net is 412 KN. For the differentially stressed net it is 216 kN and
630 KN for the hogging and sagging cables, respectively (see Section 5.2.1.2).
symmetry, 9-10, 10-11, 11-12) of almost 1 mm, while the differentially
stressed net experiences a reduction of just over 0.1 mm for the same ele-
ments. For the remaining cables, the magnitude of extensions is higher for
the differentially stressed net.
Tension field (Load Cases 1 and 2)
For Load Case 2, the differentially stressed net develops a much more uni-
form tension field, compared to the geodesic net. This is
a desirable feature
93
Tension Structures. Form and behaviour
Centre line profiles along x axis: m
9 4 8 12 16 20 24
Centre line profiles along y axis: m
oO 4 8 = 16
— Differentially stressed net
Geodesic net
Figure 5.6 Spatial net. Centre line profiles after displacements due to Load Case 2 —
wind loading.
from the point of view of load transfer to the supporting structures.
However, for Load Case 1, it is the geodesic net that shows a much more
uniform load distribution, which, overall, nullifies one possible advantage
that the differentially stressed net could have had.
The Load Case 1 has shown that the geodesic net utilizes a greater propor-
tion of its strength in resisting the applied loads and achieves it more uni-
formly than the differentially stressed net. A similar observation can be made
here with regard to Load Case 2, as shown by the percentage of breaking
load entered in columns 3 and 6 of Table 5.6.
For both structures, tensions in some cables reach very low values com-
pared to their initial pre-tension. This effect is most pronounced in the case of
the differentially stressed net under wind loading (Load Case 2). Since both
structures are quite shallow, the results of the study shown in Fig. 5.4 would
indicate that changing boundary configurations to increase surface curva-
tures (and hence stiffness) would be more advantageous in this case than
increasing the level of initial tension.
5.2.1.3 Geodesic net versus differentially stressed form and the ‘soap-film debate’
As discussed in Chapter 2, the concept of using soap-films, or minimum area
(geodesic) surfaces, as analogues for the design of tension structures is not
universally adopted. One of the main arguments used relates to the magni-
94
Case studies of cable roof structures. Design issues: form-finding and patterning
tude of deflections, which may be greater than in the differentially stressed
structure. The other — to surface curvatures being too shallow.
The results of this study show that the magnitude of displacements is not
the most critical factor in the design of cable or membrane structures: surface
curvatures and deformations are more important. Although the geodesic net
(an approximation to a stable minimal surface) may deflect more, this is not
true in every load case. For Load Case 2, for example, the differentially
stressed net exhibits a comparable level of displacement. It is shown that
large displacements do not necessarily cause large deformations that would
normally lead to problems with the fixing of cladding and, in the load cases
considered, the geodesic net developed ‘better’ curvatures than the differen-
tially stressed net.
From the point of view of structural efficiency, the geodesic net appears to
utilize more of its strength in resisting the applied loads than the differen-
tially stressed net spanning the same boundary. From the point of view of
material efficiency, it is known that a geodesic (minimal) form uses less
material, compared to a differentially stressed structure. In this particular
example, with only a few cables present, the material saving cannot be
shown to be large. However, with more cables present, it would become
significant and certainly would do so for a continuous, stable minimal sur-
face membrane.
It is also shown that, for given boundary configuration, an increase in pre-
tension in the cables may reduce displacements, but, in order to control these,
it is worth considering a change in the boundary configurations to enhance
surface curvatures and, therefore, increase the stiffness of the structure.
Overall, the results of this case study have shown that the geodesic form
(stable minimal surface), which represents an optimum for a permanent
load, ie. its initial tension, produces good results for other load cases, too.
The arguments presented so far demonstrate that using geodesic, or minimal
surface structures as analogues for the design of tension structures should be
accepted as a sound design principle.
5.2.2 Saddle net
This case study is based on the saddle net example previously presented in
Section 4.3.6 of Chapter 4 (Fig. 4.11). The structure has a dictated shape,
achieved by a series of smooth curves fitted to a chosen sag/rise ratio,
which project as straight lines on plan. The imposed shape does not produce
the full static equilibrium under the initially chosen tension field. Whereas
the condition of horizontal equilibrium is fulfilled, there are out-of-balance
forces present in the z direction. From the point of view of static analysis, the
initial lack of equilibrium does not matter; under the imposed loading, the
structure will reach a configuration that is in full equilibrium. The problem
95
Tension Structures. Form and behaviour
lies in the area of design and manufacture of such a structure, which has to
rely on the initially equilibrated geometry in order to produce an accurate
cutting pattern.
The saddle net is analysed in two stages: first, form-finding; then static
analysis. It can be seen from the results presented in Table 5.7, that the
displacements from the formefinding stage (these are the displacements
that bring the structure to equilibrium) are not insignificant. They show
that, for the initially assumed tension field, the cables would not follow the
assumed straight line projections on plan, although the deviations from
them would be small (compared to the overall size of the structure). The
values of displacements from the static analysis are those produced by the
imposed loading (loads P; and P;, of 1KN each, acting on half of the
structure). Therefore, the total displacement from the initial state, is a
sum of the two types of displacements. These results can be checked
against data published in Ref. [5.6], which gave results for the final state
of static equilibrium.
Table 5.7 Saddle net: form-finding and static analysis
Displacements from Displacements from static
form-finding analysis: mm analysis: mm.
Node x y z x y z
u 7.57 -231 40.47 793 -217 41.41
12 414 —2.66 22.90 7.28 ~2.94 38.60
13 1.61 ~1.89 5.86 5.69 -2.38 27.62
14, 0.56 -147 —1.40 472 —1.73 oe
15 0 —1.67 2.02 4.09 -1.23 13.23
er 5.83 36.42 8.57 —1.99 60.83,
23 2.59 9.07 8.63 -3.12 63.94
eae 0.26 oe —18.80 6.93 2.29 50.68,
25 © -0.03 0.12 ~27.80 5.66 ~2.30 38.03
26 0 0.90 ~37.25 476 -158 2551
33 3.81 ~0.62 23.16 7:86 -1.09 69.20
34 1.07 ~0.26 -1141 8.43 -1.85 78.18
6 -0.71 0.68 46.30 6.96 eee 66.12
36 —0.76 1.31 66.32 5.65 ae 51.62
37 0 159 a 4.65 eaeee 35.29
44 3.07 0 16.94 7.54 0.02 71.75
45 051 0 ~20.37 8.25 0.02 83.00
46 -1.08 0 58.10 6.87 0 71.58
47 -0.96 0 ~80.03 557 0 56.70
48 0 0 —85.94 454 0.01 39.12
96
Table 5.8 Saddle net: Form-finding and static analysis
Case studies of cable roof structures. Design issues: form-finding and patterning
Maximum tensions: kN. Extensions: mm
Initial Tensions Final After form- After static
Cable tension after form- _ tensions finding analysis,
element field finding
@ Q @ @ ©) ©
et 60.135 0.38 1.14
aia 60.426 0.13 pee
3-13 60.733, 70.320 —0.96 2.04
414 60.956 61.410 1.70 1.75
5415 61.036 54.143, 2.01 1.23
61.265 0.60 0.09
60.748, 0.20 0.24
60.502 65.571 0.86 0.29
60.430 67.197 1.06 0.30
Values of tension forces and extensions are given in Table 5.8. It can be
seen that the forces in the structure prior to form-finding range from 60.1 KN
to 61.3 KN. After form-finding, their range is 43.2 KN to 69.9 kN.* The largest
discrepancy between the assumed and the actual tension fields occurs in the
case of cable 5-15, where this difference is approximately 30%. This differ-
ence is attributed to just under 2 mm change in the cable length. If the
initially assumed geometry were to be used for the cutting pattern, clearly,
significant errors in the initial tension field would occur, affecting, subse-
quently, the behaviour of the structure under imposed loads. This case is
reminiscent of the experience with the Munich Olympic structure (discussed
in Chapter 2, Section 2.3.1), where small errors in cable lengths produced
changes in tensions of up to 60%.
5.2.3 Poskitt truss
The final case study presented in this chapter is a small-scale model of a
cable truss constructed by Poskitt'®7! and studied by several numerical
methods. The structure is used to focus on form-finding and patterning
issues.
“The results in Tables 5.7 and 5.8 are given for selected members, in order to minimize
output. It should be noted that after static analysis, symmetry of the results is main-
tained only about the centre line x = const.
7
Tension Structures. Form and behaviour
The measured geometry of this high-quality experimental truss is shown
in Fig. 5.7. The span of 119.47 inches (3.03454 m) accommodated 14 equally
spaced hangers. The separation between the lower and upper cable was 31.9
inches (0.81026 m).
The horizontal component of tension in the upper and lower cables was
155 Ibf (0.6895 KN). The value of the elastic constant EA value for the cables
was 53700 Ibf (238.869 KN), The hangers were made of 0.25 inch by 0.005 inch
(0.127 mm by 6.35 mm) clock spring, and hence their cross-sectional area was
0.8064 mm?
15 x 0.2033 m = 3.0345 m
2 pi te
E
3
2]
S|
Node | *ce-ord | Zco-ord Node | *00-ord | zco-ord
m m m m
1 0 0 7 ° 0.8103
2 0.2023 | 0.077 18 0.2023 0.733
3 0.4046 0.1412 19 0.4046 0.669
4 0.6069 | 0.1941 20 | 0.6069 0.6162
5 0.8092 0.2967 21 | 0.8092 0.5738
6 4.0115 | 0.2705 a ee 0.5398
jae 1.2138 | 0.2908 neo 1.2138 0.5194
eo 1.4161 | 0.301 24 1.4161 0.5093
9 1.6184 | 0.3028 25 1.6184 0.5073
10 | 1.8207 | 0.2907 26 1.8207 0.5199
i 2.023 0.2705 ED 2.023 0.5398
12 2.2253 | 0.2367 28 2.2253 0.5733
13 2.4276 | 0.1938 29 2.4276 0.6165
14 2.6299 | 0.1401 30 2.6299 0.6701
15, 2.8322 0.0752 31 2.8322 | 0.7351
16 3.0345 0 32 3.0345 0.8103 _|
Figure 5.7 Geometry of Poskitt truss: measured values
98
Case studies of cable roof structures. Design issues: form-finding and patterning
The truss was subjected to two types of imposed loading, described in
Sections 5.2.3.1 and 5.2.3.2.
Poskitt!®”! used the Newton-Raphson method in conjunction with the
step-by-step or simple iteration method'*” **! to predict the behaviour of
his experimental model. The same structure was analysed by Meek!**!
employing essentially the same approach, ie. the tangent stiffness method.
In this study, the form-finding analysis is undertaken to predict the shape
of the Poskitt truss, using the reported measured values of the span, cable
separation at the boundaries, number of hangers and their spacing, and the
horizontal components of force for the lower and upper cable. Iterations by
the dynamic relaxation method were carried out until the out-of-balance
force at all nodes of the structure was less than 1 x 10-7 kN.
The results show excellent agreement with the measured values: a max-
imum displacement in the z direction, equal to 0.29 mm, occurred at node 18.
A very good agreement is also achieved with the experimental values of the
initial forces in hangers.’ Unfortunately, Poskitt did not provide the value of
the Young’s modulus for the hangers; the value assumed in the analysis’ was
128 KN/mm?.
Static analysis by the dynamic relaxation method followed on from the
form-found geometry using the elastic response of the cables and hangers to
the applied loads. Two load cases, as reported by Poskitt/°7! were consid-
ered. These are discussed in turn.
5.2.3.1 Load Case 1
‘The truss is subjected to point loads P; = 3.1 Ibf (13.8 N) applied to all nodes
along the bottom cable.
The displacements for this load case were found to be of the order of 2-3
mm in the z direction, and under 0.3 mm in the x direction, A comparison
between the numerical predictions and experimental measurements of dis-
placed bottom cable”! is given in Fig. 5.8. The numerical results presented
by the author (using the dynamic relaxation algorithm) show greater
symmetry than the reported measured values.
The results also appear to be in good agreement with the numerical values
presented by Poskitt.®7! However, only qualitative comparisons could be
made with regard to the deformed geometry of the structure, as both the
*Tabulated results from form-finding and the subsequent static analysis are not given
for reasons of brevity. These can be provided on request.
* Experimental investigations carried out by the author have indicated that the
Young’s modulus value can vary significantly for small-diameter cables and steel
sections. It is advisable to use measured values rather than rely on nominal values
quoted by manufacturers.
a
Tension Structures. Form and behaviour
Verical displacements of bottom cable: m
00 02 04 06 08 10 12 14 16 18 20 22 24 26 28 30 92
== oiparimenial
ee computed
Figure 5.8 Poskitt truss. Loaa Case 1: Vertical displacements of bottom cable.
numerical and experimental results were given by Poskitt in the form of
graphs.
Small values of the x components of displacements indicate that the hor-
izontal force component is fairly constant in both cables (hangers remain
vertical). This, in fact, was confirmed by the dynamic relaxation results,
which showed that the calculated horizontal force components for the top
and bottom cables were approximately constant and equal to 0.811(8) kN,
and 0.568(2) kN, respectively.* Thus, the changes in horizontal components
of cable tension, relative to the initial value of 0.6895 kN, were approximately
equal to +0.122 KN (27.5 Ibf) for the top cable, and —0.121 KN (27.3 Ibf) for the
bottom one. These values agree with Poskitt’s numerical results of +27 Ibf,
but are slightly different to the experimental results, which gave +29 Ibf for
the top cable and -28 Ibf for the bottom one.
5.2.3.2 Load Case 2
The truss is subjected to a point load Ps = 26 Ibf (115.41 N) applied to node
22 in the bottom cable (Fig. 5.7).
The vertical displacements of the bottom cable, which include Poskitt’s
experimental results, are given in Fig. 5.9. It can be seen that as far as the
geometry of the structure is concerned, good agreement between the
dynamic relaxation results and the reported experimental values is achieved.
* The reason why the horizontal component of tension is not exactly constant is due to
the initial shape of the structure deviating slightly from the assumed symmetry, as
shown by the results in Table of Fig, 5.7.
100
Case studies of cable roof structures. Design issues: form-finding and patterning
Vertical displacements of bottom cable: m
02 04 06 08 19 12 14 16 2022 24 26 MRA 30 32
010
0015
0.020
Figure 5.9 Poskitt truss. Load Case 2: Vertical displacements of bottom cable.
It should be noted that, since the applied load is asymmetric, the x com-
ponents of displacements are not insignificant; in fact, they were found to be
of the order of 2.7-2.8 mm at nodes 10-13 (and these compare with the
displacements of 6.3-7.2 mm in the z direction). Consequently, the changes
in the horizontal components of tension in the cables are nof constant. This is
at variance with Poskitt’s numerical analysis, which assumes that the x
displacements are negligible, and the resulting tension forces in the cables
have a constant value of the horizontal component. The results showing the
variation of horizontal force components and the corresponding increases (or
decreases) in the horizontal components of cable tensions relative to the
starting, value of 0.6895 are given in Table 5.9. The variations predicted by
the dynamic relaxation algorithm, are from +29.91 Ibf to +32.14 Ibf for the
top cable, and from —9.03 Ibf to —11.27 Ibf for the bottom cable. These values
compare with +31 Ibf and —10 lbf, respectively, using Poskitt’s numerical
results. His reported experimental values are +34 Ibf, and —13 Ibf, for the top
and bottom cables, respectively.
Poskitt suggests that the discrepancy between his numerical and experi-
mental results is due to experimental errors and assumptions made in the
analysis. This, undoubtedly, is true. The results appear to confirm Poskitt’s
conclusions that the effect of neglecting horizontal components of displace-
ments in the numerical analysis was small. It should be noted, however, that
neglecting horizontal components of displacements in the analysis would
have produced inaccurate results.
The analysis of Poskitt’s truss produced by Meek'**! used a number of
inaccurate assumptions. These ultimately led to the results that were very
different from the measured values, particularly with regard to the forces in
the structure. The first inaccurate assumption was that the top cable followed
the shape of a catenary, and the second (more serious), that the spacing of
hangers was given in terms of unstressed length of cable.
[591
101
Tension Structures. Form and behaviour
Table 5.9 Poskitt truss. Load Case 2. Variation in horizontal components of cable
forces, Fx
Dynamic relaxation Poskitt'®°!
AFx: Numerical — — Experimental —
Member = Fx:kKN KN AFx: Ibf AFx : Ibf AFx: Ibf
Top cable 31 34
12 0.83248 0.14298 32.14
23 0.83245 0.14295 32.14
4 0.83232 0.14282 32.11
45 0.83203 0.14253 32.04
5-6 0.83149 0.14199 31.92
67 0.82841 0.13891 31.23
7-8 0.82749 0.13799 31.02
89 0.82678 0.13728 30.86
910 0.82561 0.13611 30.60
10-11 0.82500 0.13550 30.46
11-12 0.82404 0.13454 30.25
12-13 0.82349 0.13399 30.12
13-14 0.82302 0.13352 30.02
14-15, 0.82268 0.13318 29.94
15-16 0.82253 0.13303 29.91
Bottom cable —10 eet si
17-18 0.63937 —0.05013 —11.27
18-19 0.63940 —0,05010 11.26
19-20 0.63952 0.04998 —11.24
20-21 0.63982 —0.04968 —11.17
21-22 0.64035 —0.04915 11.05
22-23 0.64343 0.04607 —10.36
23-24 0.64436 —0.04514 10.15
24-25 0.64506 ~0.04444 —9.99
25-26 0.64624 —0.04326 -9.73
26-27 0.64684 —0.04266 -—9.59
27-28 0.64780 0.04170 ~9.37
28-29 0.64835 -0.04115 9.25
29-30 0.64883 0.04067 —9.14
30-31 0.64917 0.04033 —9.07
31-32 0.64931 —0,04019 -9.03
AFx is the change in the horizontal component of tension force from the initial constant
value of 0.6895 KN (155 Ibf).
102
Case studies of cable roof structures. Design issues: form-finding and patterning
5.2.3.3 Accuracy in model manufacture/patterning
Poskitt7! does not comment on the manufacturing (patterning) accuracy
required to produce his truss, but the agreement between the experimental
and numerical results indicates a very high level of precision employed. It is
interesting to investigate how the potential errors in the manufacture of the
Poskitt truss could affect its shape, and thus highlight possible difficulties in
the accurate manufacture of the model.
This problem is investigated using a sensitivity study, in which it is
assumed that the hangers and cables are not manufactured to the required
accuracy, by assuming that their lengths are somewhat shorter than required.
The following, cases are considered:
Case 1:
(a) The length of one hanger (9-25) is made shorter than the correct
length by 1 mm
(b) The length of all hangers are made shorter than the correct lengths by
1mm.
Case 2:
(a) The lengths of the end members of the sagging and hogging cables
(1-2, 15-16, 17-18, 31-32) are made shorter than their correct lengths
by 0.5 mm.
(b) The lengths of all top (sagging) cable members plus the two end
members of the bottom cable are made shorter than their correct
lengths by 0.5 mm. This gives a total error for the top cable of 7.5
mm.
It is, of course, possible to introduce errors on the positive side too, i.e. cables
and hangers being made too long rather than too short, but the analysis
presented here is sufficient to deduce, in qualitative terms, what is likely
to happen to the structure subjected to small manufacturing inaccuracies.
In all cases, the errors in the cable lengths are translated into a change in
tension force arising from the additional straining. This change is calculated
as AT, = EA x AL/Lm, and is fed into the form-found geometry of the truss
to find a new equilibrated state.
In Cases 1(a) and (b), AL is 1 mm. With the EA value of the hangers of
103.4675 kN, the corresponding increase in tension force is added to the
existing tension field. This throws the structure out of balance, giving way
to iterative computations, which restore the full static equilibrium.
Tn Case 1(a), it is found that the error in the length of just one hanger had a
negligible effect on the resulting geometry and the final forces.
Similar observation is made with regard to Case 1(b) with the 1 mm error
in all hanger lengths. A systematic increase in tension of around 4%, in both
103
Tension Structures. Form and behaviour
the hanger and cable members, is observed. This shows a remarkable recov-
ery of the structure, from the position of having input tensions in hangers of
12, 14, even 19 times higher than the initial values. Figure 5.10 captures this
effect and shows the final tensions at a much lower level, matching that of
the initial (form-found) tension field to within the stated 4%. The load-reliev-
ing activity observed in Case 1 is also true for Case 2.
In Case 2(a), the input tensions are 75-76% higher than the ones in the
original structure. The resulting displacements are found to be small, making
little difference to the initial (form-found) geometry. However, tension forces
arising from the errors in cable lengths underwent a drastic reduction when
the structure reached full static equilibrium. This phenomenon is illustrated
in Fig. 5.11, where the results are presented for the top cable. The behaviour
of the bottom cable mirrors that of the top and therefore is not presented
graphically.
Case 2(b) is the most severe of all the four cases. The input tensions are
up by 85%, but the structure recovers to almost a ‘halfway’ position, with
an increase of around 50% in the final tension forces. The displacements*
were found to be between 1 and 5 mm in the z direction and ten times
smaller in the x direction. The profile of the structure would not, there-
fore, be visibly different from its original, form-found configuration.
Therefore, the results with regard to the final tension field are even
more surprising.
Hanger member
ie 5 68 7 8 9 1 1 2 3 14
ee egy
0.10%
‘
Zope, $
= ‘ ‘
¥ 030! + i
® a0: i
4 * .
| + |
0.50 : tears + it
0.0
Input hanger tensions
= Final hanger tensions
nsitivity study. Case 1(b): 1 mm error in the lengths of
hangers.
*Results not included, for brevity. They can be produced on request
104
Force: kN
Case studies of cable roof structures. Design issues: form-finding and patterning
Variation of forces in top cable
1.35
1.25
0.98
0.85
075
065
ee Ce Os
Cable member
‘© fiput tersions|
= Final tensions
Figure 5.11 Poskill truss: sensitivity study. Case 2(a): 0.5 mm error in the lengths of
cables.
outer
Figure 5.12. Poskitt truss
top cable members
Forces: KN
Forces: kN
Variation of forces in top cable
138
TET ee eee ee eee
125
15} :
.
nosy
09s |
oss
Crete ae eral ata aa ee |
ossL——_—_-_*_* 4 4 4 4 8 8
T2545 6783 0 1 2 8 uw 6 16
Cable member + pat ionsions
1 Final tensions
A. Tensions fom
formefnding
Variation of forces in bottom cable
195 -
128 L
148 :
105} '
ee . |
096 |
085 |
07s |
tote ee ee te
06s
123 45 6 7 8 9 0 1 2 13 MM 15 16
Cable member
sensitivity study. Case 2(b): 0.5 mm error in the lengths of all
plus t2vo outer sections of the bottom cable.
105
Tension Structures. Form and behaviour
5.2.3.4 Conclusions
The conclusion of this case study is that tension structures have a remarkable
ability to accommodate loads and relieve stresses, due to their flexibility.
However, persistent errors in cable lengths can lead to a large variation in
the tension field, from that corresponding to the original, form-found con-
figuration. Inaccuracies fed into Poskitt’s truss were not unrealistic: a 7.5mm.
total error in pre-cutting of the cable of over 3 m length. Yet, as shown by the
results of the sensitivity study (Case 2(b)), this led to an overall increase in
final tension forces of 50%. Such variations bear implications for the design of
the supporting structures.
In the case of full-size structures, geometric control on site (without ade-
quate monitoring of forces during construction) can give a very misleading
picture of the tension field that may develop.
The problem of achieving the required accuracy has been reported several
times in this book, in relation to the construction of the cable roofs for the
Munich Olympic Stadium (Section 5.2 and Chapter 2, Section 2.3.1). This case
is also quoted by Krishna/°*! who draws attention to the fact that construc-
tion problems in cable structures can be attributed to:
(@ insufficient accuracy in computed cutting patterns
(ii) errors in marking and cutting of cables
(iii). wrong positioning of clamps
(iv) incorrect clamping of cables at the intersection points
(v) inaccuracies in the formation of edge loops and fixing of turnbuckles.
In view of the inherent problems of accuracy in the manufacture and con-
struction processes outlined above, it is vital to ensure that the form-finding
and cutting pattern calculations are as accurate as possible, so that the total
error in the manufacture of tension structures is kept to a minimum.
Buchholdt*! expresses disappointment that the early expectations for the
demand of cable roof structures has not been realized and their use in earth-
quake areas never properly exploited. The problems of form-finding, accu-
racy of manufacture and construction of such structures, might be the
answer as to why this has been the case.
References
(5.1] Lewss, W. J. (1999). Lightweight tension structures — an aesthetic integration
of geometry and mechanics. Part I — The role of minimal surfaces and soap-
films. Mathematics Today (the IMA Bulletin), 35, No. 1, 10-16.
(5.2). Pieifer catalogue. Seilbauwerke. Lightweight cable structures. Pfeifer Seil-
und Hebetechnik GmbH & Co, Mammostrasse 1, P.O. Box 1754, D-8940
Memmingen, Germany.
[5.3]. Krista, P. (1978). Cable Suspended Roofs. McGraw-Hill, New York, 1978.
106
Case studies of cable roof structures. Design issues: form-finding and patterning
[54]. Gimsine, N. J. (1997). Cable Supported Bridges, 2nd edn. John Wiley & Sons,
Chichester.
[5.5]. BucHowor, H. A. (1999). An Introduction to Cable Roof Structures, 2nd edn.
Thomas Telford, London.
[5.6]. Lewis, W. J. (1989). The efficiency of numerical methods for the analysis of
prestressed nets and pin-jointed frame structures. Computers and Structures, 33,
No. 3, 791-800.
(5.71. Poskrrr, F. (1967). Numerical solution of non-linear structures. Journal of
Structural Division, ASCE, ST3, 93, 69-94,
[5.8]. Cuapra, S.C. and Canate, R. P. (1985). Numerical Methods for Engineers, 2nd
edn. McGraw-Hill, New York.
[5.9]. Mesk, J. L. (1991). Computer Methods in Structural Analysis. E.&F.N. Spon.
107
6
Tension cables in suspension bridges.
A case of form-finding
Suspension bridges are viewed as structures of known shape, rending form-
finding procedures unnecessary. However, is this view justified? The general
acceptance of a suspension cable adopting a parabolic shape carries an
underlying assumption of an inextensible, weightless cable subjected to a
uniformly distributed deck load. The main aim of this chapter is to discuss
the consequences of such an assumption and show, by means of numerical
form-finding, the effect of cable weight and cable elasticity on the initial
shape of the suspension cables. The chapter focuses on form-finding issues
and briefly discusses consequences of an inappropriate choice of structural
form for suspension cables, with reference to the London Millennium Bridge.
Before embarking on numerical form-finding analysis, it is worthwhile to
examine the capabilities of an analytical approach. In the following section,
a general ‘shape equation’ is derived for the case of an inextensible cable
under its own weight, the deck and hanger weights. The resulting shape is
described by a second-order, non-linear differential equation, for which
closed-form solutions can be obtained only in certain cases. Assuming the
weight of the hangers is insignificant, the ‘shape equation’ provides the
following solutions:
(i) a parabola, for a laterally flexible, but inextensible cable assumed to be
weightless and subjected to a uniformly distributed load
(ii) a catenary, as in the case above, but for a heavy cable and very light
deck
(iii) a log-secant curve for a constant stress cable under self-weight.
In all of the above cases, it is assumed that the load applied to the cable is
uniformly distributed. In reality, the cables are subjected, predominantly, to
point loads applied by the hangers transferring the deck weight. The hanger
spacing can affect the shape of an inextensible cable, even under the simplest
load case, ie. deck weight only. This case is described both analytically and
numerically in Section 6.3.1.1. The case of an inextensible cable, subjected to
109
Tension Structures. Form and behaviour
discrete loads from the deck plus cable self-weight, is solved numerically and
is presented in Section 6.3.1.2.
All of the above cases represent various degrees of approximation to the
real problem, which is that of an extensible cable. The ‘shape equation’ of an
extensible cable is derived in Section 6.2. It covers the cases of cable self-
weight only, and deck weight plus cable weight, assuming the hangers are
weightless. The resulting shapes are parametrically defined curves, which
require numerical solutions.
6.1 ‘Shape equation’ for an inextensible suspension cable
Figure 6.1 shows a suspension cable bridge for which the following variables
are defined: T, is the cable tension at an arc length s from the centre of the
span; q is the deck weight per unit length of deck, q = wg, where w is the deck
density (per unit length), g is the gravitational constant, 1 is the cable density
a)
[= aL, 42
xr
h
Tj
a
_ ss 4
b)
Fail To
Figure 6.1 (a) Elevation view of a suspension bridge, (b) Detail.
110
Tension cables in suspension bridges. A case of form-finding
(mass/unit length of cable), and y is the hanger density (mass/unit area),
assuming that the hangers form an equivalent, continuous ‘curtain’ of
material under the cable.
The vertical equilibrium of the cable element (Fig. 6.1 (b)), gives
fr sina + fa, sin ox] —T, sina — mg ds — (qdx + zug dx)
s
(6.1)
and the horizontal equilibrium leads to
d
[r. cosa t (Ty cosa] —T,cosa =0 (6.2)
The above simplify to, respectively
@) ds ds
ge TIT MSG + HSE (6.3)
)
eqn (6.3) becomes
d(T, si a
aiesine) =qtmgv1 +22 +pg2 (6.5)
Equation (6.4) reduces to
T, cosa = const.
Taking the origin, x = 0 at the centre span, the tension at centre span (and
horizontal force at pylon) is
0 (6.6)
T,.cosa =
so that eqn (6.5) becomes
a Fae
gy lTotana) = q+ mgv1 +2? + ge
and since tana = dz/dx, the final form of the shape equation for an inexten-
sible suspension cable is
111
Tension Structures. Form and behaviour
az a
Ge ttt ovi+22 +e2 (6.7)
where
G mg _ Hg
=a ba qe anda
As stated in the opening paragraph of this chapter, eqn (6.7) does not have a
general closed-form solution, but for certain loading conditions it predicts a
variety of curves defining the shape of the cable, and these are going to be
examined in turn.
6.1.1 The parabolic approximation
Here, the weight of the cables and hangers is assumed to be negligible
compared to the weight of decking so that bc 0 in eqn (6.7) and,
therefore,
fz
Cho
Integrating gives
tot taxte
3 1X +
Assuming a symmetric configuration about the centre span x = 0 at which
0 = z(0) = z'(0), the arbitrary constants c; and c, are both zero, and
hax
=}0
oe 8
27% -
The tension, To at centre span can be determined by imposing the condition
that the cable is attached to the pylon at L/2 , h (Fig, 6.1(a)). Hence
from which
ai
8h
Substituting for Ty in eqn (6.8) gives
To
(6.9)
4h
rath
=a (6.10)
ee
You might also like
- 101 Problems in AlgebraDocument160 pages101 Problems in AlgebraTrishaii Cuaresma96% (28)
- Business Startup Guides-Preparing Yourself Ver 2Document4 pagesBusiness Startup Guides-Preparing Yourself Ver 2Minh Huỳnh100% (1)
- ElvisDocument1 pageElvismaui3No ratings yet
- Calculus Cheat Sheet DerivativesDocument4 pagesCalculus Cheat Sheet DerivativesRajatNo ratings yet
- Flow Design Formulas For Calculation - Exported From (HTM - 02 - 01 - Part - A)Document8 pagesFlow Design Formulas For Calculation - Exported From (HTM - 02 - 01 - Part - A)wesam allabadi50% (2)
- Tubular Structures 2nd Edition 2011 LowresDocument225 pagesTubular Structures 2nd Edition 2011 LowresAnonymous hprsT3WlPNo ratings yet
- All Art Is Propaganda PDFDocument2,708 pagesAll Art Is Propaganda PDFPau_Brand_255033% (3)
- Space FrameDocument4 pagesSpace FrameKomal KhatriNo ratings yet
- Amoroso S.D. - Wind Loads For Petrochemical Structures PDFDocument265 pagesAmoroso S.D. - Wind Loads For Petrochemical Structures PDFRobert VochescuNo ratings yet
- 3 - Urban Regeneration 1 - Tensile StructureDocument37 pages3 - Urban Regeneration 1 - Tensile StructureAnonymous ZgS7rwUBNo ratings yet
- 2006 - Elsevier - P.A. Blackmore, E. Tsokri - Wind Loads On Curved RoofsDocument12 pages2006 - Elsevier - P.A. Blackmore, E. Tsokri - Wind Loads On Curved RoofsRobert VochescuNo ratings yet
- A Review On Applications of Tuned Liquid Dampers in Vibration ControlDocument17 pagesA Review On Applications of Tuned Liquid Dampers in Vibration ControlBharadwaj NandaNo ratings yet
- Lateral Torsional Buckling of I-BeamsDocument138 pagesLateral Torsional Buckling of I-BeamsRobert Vochescu100% (1)
- Finite Element Analysis of Laminated Structural Glass Plates With Polyvinyl Butyral (PVB) Interlayer PDFDocument8 pagesFinite Element Analysis of Laminated Structural Glass Plates With Polyvinyl Butyral (PVB) Interlayer PDFRobert VochescuNo ratings yet
- Vertical Building Structures, Wolfgang SchuellerDocument11 pagesVertical Building Structures, Wolfgang Schuellerwolfschueller0% (1)
- Design of Cable Stayed Truss Chonju WC Stadium JongDocument22 pagesDesign of Cable Stayed Truss Chonju WC Stadium Jongnarens_skNo ratings yet
- CLT HandbookDocument38 pagesCLT HandbookMikeNo ratings yet
- Time History AnalysisDocument4 pagesTime History AnalysisYoussef AliNo ratings yet
- Ce6702 PDFDocument191 pagesCe6702 PDFsandhya100% (1)
- Design of RC Corbels and NibsDocument21 pagesDesign of RC Corbels and Nibsscg1998100% (2)
- Renault Inyección Electrónica Kangoo RL-RN 1.6 1999 Siemens Sirius 32b PDFDocument2 pagesRenault Inyección Electrónica Kangoo RL-RN 1.6 1999 Siemens Sirius 32b PDFOsvaldo LópezNo ratings yet
- PCI Fundamentals of Prestressed Concrete DesignDocument135 pagesPCI Fundamentals of Prestressed Concrete DesignxufafruitjuiceNo ratings yet
- Freund-Dynamic Fracture MechanicsDocument583 pagesFreund-Dynamic Fracture MechanicsRavi Sankar H50% (2)
- Prestressed Concrete BridgesDocument291 pagesPrestressed Concrete BridgesRobert Vochescu100% (4)
- The Y BeamDocument7 pagesThe Y BeamSivakumarNo ratings yet
- Presentacion Star Seismic 2016Document68 pagesPresentacion Star Seismic 2016Rodrigo SilvaNo ratings yet
- 004 Bt5 Cable Tensile Fabric StructureDocument23 pages004 Bt5 Cable Tensile Fabric StructureGem de GuzmanNo ratings yet
- Shear and Torsion in Concrete StructuresDocument202 pagesShear and Torsion in Concrete StructuresRobert VochescuNo ratings yet
- Tension Structure Connection Details Fabric ArchitectureDocument10 pagesTension Structure Connection Details Fabric ArchitecturesofiakamranNo ratings yet
- Long Slotted Expansion Joint FailureDocument3 pagesLong Slotted Expansion Joint FailureAnonymous 7MdZQn1No ratings yet
- Alan G Davenports Mark On Wind Engineering Isyumov2012Document13 pagesAlan G Davenports Mark On Wind Engineering Isyumov2012Raúl SánchezNo ratings yet
- An Intro To Tensile Structures PDFDocument20 pagesAn Intro To Tensile Structures PDFSuraj De SilvaNo ratings yet
- Design Considerations in Cable-Stayed Roof StructuresDocument7 pagesDesign Considerations in Cable-Stayed Roof StructuresSunil PulikkalNo ratings yet
- Kurilpa Bridge Case StudyDocument4 pagesKurilpa Bridge Case StudyTheomi BunburyNo ratings yet
- 01 RRLDocument64 pages01 RRLJohn Lloyd Palaganas TulaganNo ratings yet
- Portal Frames-Building ConstructionDocument18 pagesPortal Frames-Building ConstructionDivya chowdaryNo ratings yet
- Cover LetterDocument1 pageCover LetterMuhammad HassanNo ratings yet
- Can Csa S806-02 (115-119)Document5 pagesCan Csa S806-02 (115-119)JEISON CALIXTO VARGASNo ratings yet
- A Design Tool For Timber GridshellDocument237 pagesA Design Tool For Timber Gridshellthanhmai171100% (2)
- Castellated BeamsDocument5 pagesCastellated BeamskhalidcosmosNo ratings yet
- Spancrete - CarbonCast - HP Insulated Wall PanelsDocument8 pagesSpancrete - CarbonCast - HP Insulated Wall PanelsMattSearsNo ratings yet
- NSCP 2010 Seismic ProvisionsDocument67 pagesNSCP 2010 Seismic ProvisionsJule LobresNo ratings yet
- New Developments in Lift Slab Construction - tcm45-343687Document3 pagesNew Developments in Lift Slab Construction - tcm45-343687Tomasz WiatrNo ratings yet
- A New Codified Design Theory of Second-Order Direct Analysis For Steel A...Document7 pagesA New Codified Design Theory of Second-Order Direct Analysis For Steel A...Luis MartinsNo ratings yet
- The Philippine Green Building Code V3Document32 pagesThe Philippine Green Building Code V3itsmebridgethNo ratings yet
- Design Criteria For Mosques and Islamic Centers: Art, Architecture and WorshipDocument10 pagesDesign Criteria For Mosques and Islamic Centers: Art, Architecture and WorshipHasyir Hazwan0% (1)
- A On Monolithic Construction For Mass HousingDocument20 pagesA On Monolithic Construction For Mass Housingkhajarasool786No ratings yet
- Cable StayedDocument26 pagesCable StayedMd Waseem AkramNo ratings yet
- Cable Stayed BridgeDocument9 pagesCable Stayed BridgeTanweer AyoubNo ratings yet
- Geo Syit93 Port KelangDocument1 pageGeo Syit93 Port KelangpasifikNo ratings yet
- Advanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionFrom EverandAdvanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionNo ratings yet
- Ibfc 142 Engenheiro MecanicoDocument16 pagesIbfc 142 Engenheiro MecanicoJosé Maria junior100% (2)
- 2020Document14 pages2020mintrikpalougoudjoNo ratings yet
- El Pastor - VihuelaDocument1 pageEl Pastor - VihuelaDamian Guardia SalazarNo ratings yet
- Ampacidad AlimentacionDocument1 pageAmpacidad Alimentacionluis miguel sanchez estrellaNo ratings yet
- Strong Enough - DrumsDocument2 pagesStrong Enough - DrumsКолянсур ИвановNo ratings yet
- Mix Trompeta ChilombianoDocument1 pageMix Trompeta ChilombianoDenise AlvaradoNo ratings yet
- Extracto Destinos-Elementos-para-la-gestión-de-destinos-turisticosDocument76 pagesExtracto Destinos-Elementos-para-la-gestión-de-destinos-turisticosEnzo Navarrete UlloaNo ratings yet
- UTS ELT MDE S1 Coursebook Evaluation ChecklistDocument3 pagesUTS ELT MDE S1 Coursebook Evaluation ChecklistHanin Khalishah WaqqasNo ratings yet
- Indian Express 19 AugustDocument20 pagesIndian Express 19 AugustTension Dene kaNo ratings yet
- Trompeta 2Document2 pagesTrompeta 2Mauricio TorresNo ratings yet
- 01 - Lista de Parametros SimplificadaDocument8 pages01 - Lista de Parametros SimplificadaLuis Felipe VidigalNo ratings yet
- Charles D Ghilani - Paul R Wolf - Elementary Surveying - An Introduction To Geomatics-Pearson Prentice Hall (2012) - ExtractoDocument19 pagesCharles D Ghilani - Paul R Wolf - Elementary Surveying - An Introduction To Geomatics-Pearson Prentice Hall (2012) - ExtractoRodrigo DelBarrioNo ratings yet
- Hecho Del PíncipeDocument11 pagesHecho Del PíncipeEdisson MoralesNo ratings yet
- Tema 6. CULTURADocument7 pagesTema 6. CULTURAMarinaNo ratings yet
- Greenwashing Nas EmpresasDocument37 pagesGreenwashing Nas EmpresasLara GagoNo ratings yet
- Cicuta Tibia - TubaDocument2 pagesCicuta Tibia - TubaYohan Octavio Vera DelgadoNo ratings yet
- 1987 - ASCE - Polyzois, Dimos - Sag Rods As Lateral Supports For Girts and PurlinsDocument11 pages1987 - ASCE - Polyzois, Dimos - Sag Rods As Lateral Supports For Girts and PurlinsRobert Vochescu100% (1)
- Wind On Canopies PDFDocument12 pagesWind On Canopies PDFRobert VochescuNo ratings yet
- Leeetal.2018 Greenhouseventilation Reclaimedland PDFDocument24 pagesLeeetal.2018 Greenhouseventilation Reclaimedland PDFRobert VochescuNo ratings yet
- Anchor Reinforcement For Concrete Podium SlabsDocument12 pagesAnchor Reinforcement For Concrete Podium SlabsRobert VochescuNo ratings yet
- 1974 - Lieblein - Efficient Methods of Extreme-Value MethodologyDocument36 pages1974 - Lieblein - Efficient Methods of Extreme-Value MethodologyRobert VochescuNo ratings yet
- 1999 - Palutikof - A Review of Methods To Calculate Extreme Wind SpeedsDocument14 pages1999 - Palutikof - A Review of Methods To Calculate Extreme Wind SpeedsRobert VochescuNo ratings yet
- Fem TriangoloDocument26 pagesFem TriangoloRobert VochescuNo ratings yet
- AAWE - The Wing Engineer - COnvertion Factors PDFDocument11 pagesAAWE - The Wing Engineer - COnvertion Factors PDFRobert VochescuNo ratings yet
- The General Method of EN 1993-1-1 PDFDocument2 pagesThe General Method of EN 1993-1-1 PDFRobert VochescuNo ratings yet
- Fluid Viscous Dampers: An Effective Way To Suppress Pedestrian-Induced Motions in FootbridgesDocument10 pagesFluid Viscous Dampers: An Effective Way To Suppress Pedestrian-Induced Motions in FootbridgesRobert VochescuNo ratings yet
- B.H.v. Topping, P. Ivanyi - Computer Aided Design of Cable Membrane Structures (Cut)Document266 pagesB.H.v. Topping, P. Ivanyi - Computer Aided Design of Cable Membrane Structures (Cut)Robert Vochescu100% (1)
- Wanda J Lewis - Tension Structures Form and BehaviourDocument217 pagesWanda J Lewis - Tension Structures Form and BehaviourRobert VochescuNo ratings yet
- Design of Concrete Structures, RombachDocument298 pagesDesign of Concrete Structures, RombachRaul StrugarNo ratings yet