You might also like
- Cam MechDocument24 pagesCam MechmarcglebNo ratings yet
- Cam DrawingDocument12 pagesCam DrawingПараг ТамбеNo ratings yet
- Ch-5 Toothed Gears - 1Document40 pagesCh-5 Toothed Gears - 1Samar GuptaNo ratings yet
- Universal JointDocument15 pagesUniversal Jointmos3ad2006100% (1)
- Cam BasicsDocument50 pagesCam Basicsmass3444No ratings yet
- Notes On Gears IIDocument3 pagesNotes On Gears IIRikhil YalamanchiNo ratings yet
- 8 Helical GearsDocument12 pages8 Helical GearsWahyu Purwo RaharjoNo ratings yet
- Roller Adjustment and SkewDocument43 pagesRoller Adjustment and Skewcrengifo1726100% (10)
- Resharpening & Inspection Cutting Tools PDFDocument10 pagesResharpening & Inspection Cutting Tools PDFHeineken Ya PraneetpongrungNo ratings yet
- Shaving MethodsDocument7 pagesShaving MethodsSunilkumar ReddyNo ratings yet
- Klein Technical GuidelineDocument21 pagesKlein Technical GuidelinePeter100% (2)
- Unit-3 Helical GearsDocument38 pagesUnit-3 Helical GearsMarthande100% (1)
- 04-Clamping Principles & ClampsDocument86 pages04-Clamping Principles & ClampsVanaja Jadapalli83% (6)
- Setting Out of Transition CurvesDocument13 pagesSetting Out of Transition CurvesapurvajahagirdarNo ratings yet
- Bevel GearDocument9 pagesBevel GearAadil KhanNo ratings yet
- Bevel & Hypoid Gears:: Measuring BacklashDocument3 pagesBevel & Hypoid Gears:: Measuring Backlashrashm006ranjan100% (1)
- Gear Theory 1Document164 pagesGear Theory 1suneel kumar rathoreNo ratings yet
- DescriptionDocument7 pagesDescriptionfarookkarimNo ratings yet
- XFLR5 Tut v1Document40 pagesXFLR5 Tut v1spandaglis0% (1)
- Self-Locking Gear - Design and Potential ApplicationsDocument7 pagesSelf-Locking Gear - Design and Potential ApplicationsVikram BalajiNo ratings yet
- Hellical GearsDocument3 pagesHellical GearsLeon987456321No ratings yet
- Design of Transmission System Unit IIIDocument57 pagesDesign of Transmission System Unit IIIRaj MohanNo ratings yet
- Gyroscopic EffectDocument13 pagesGyroscopic EffectRavinder SinghNo ratings yet
- KOM Unit-4Document12 pagesKOM Unit-4puneethNo ratings yet
- Cam 1Document20 pagesCam 1rajroshansatapathyNo ratings yet
- Chapter 3: Angular Measurements: Definition of AngleDocument10 pagesChapter 3: Angular Measurements: Definition of AngleMohsin Munawar100% (1)
- Profile CalculationDocument13 pagesProfile CalculationAtsis PapadopoulosNo ratings yet
- Drive Systems: Experiments 2: Angle of Lap. Aims and ObjectivesDocument5 pagesDrive Systems: Experiments 2: Angle of Lap. Aims and Objectiveslaura sageNo ratings yet
- Cams & Followers: ME 323 / 321 D Machine Elements 2 Prepared By: A. RecachoDocument49 pagesCams & Followers: ME 323 / 321 D Machine Elements 2 Prepared By: A. RecachoMark Angelo Uy0% (1)
- TorsionDocument18 pagesTorsionBhupesh GoyalNo ratings yet
- Optimal Dip Angle For Cablebolting in Open Pits: P.J. Valenzuela PJV, North Beach (Perth), AustraliaDocument11 pagesOptimal Dip Angle For Cablebolting in Open Pits: P.J. Valenzuela PJV, North Beach (Perth), AustraliaRonan CayoNo ratings yet
- Design of Power ScrewsDocument45 pagesDesign of Power Screwssbkulk100% (1)
- Cams and Followers Lecture - 2Document13 pagesCams and Followers Lecture - 2niaz kilamNo ratings yet
- Kom Unit IIIDocument20 pagesKom Unit IIIRamanathan DuraiNo ratings yet
- SheddingDocument38 pagesSheddingfekadeNo ratings yet
- Compression Springs: Compression Spring Design General ConsiderationsDocument15 pagesCompression Springs: Compression Spring Design General Considerationsblowmeasshole1911100% (1)
- GearDocument19 pagesGearArul DossNo ratings yet
- Shaft Alignment MathDocument8 pagesShaft Alignment MathJose RattiaNo ratings yet
- Elearning - Vtu.ac - in 18 Enotes 10ME42 Unit3-PRVDocument10 pagesElearning - Vtu.ac - in 18 Enotes 10ME42 Unit3-PRVLokesh NarasimhaiahNo ratings yet
- 3D WingsDocument19 pages3D Wingssamik4uNo ratings yet
- Power Screw & GearsDocument91 pagesPower Screw & Gearssam0415100% (1)
- Theory Machines 4 Cams: Classification of Cams and Followers: Disk or Plate Cam With Radial Roller FollowerDocument16 pagesTheory Machines 4 Cams: Classification of Cams and Followers: Disk or Plate Cam With Radial Roller FollowerGabriel Jia Yong EeNo ratings yet
- Power in RollingDocument3 pagesPower in RollingMai Osama100% (1)
- Azimuth ChangeDocument4 pagesAzimuth ChangeLazuardhy Vozicha Futur0% (1)
- Mec411 NL Chapter 3Document26 pagesMec411 NL Chapter 3Danish ZulkifliNo ratings yet
- Unit 60: Dynamics of Machines: Outcome 2 - Kinematics and Dynamics Tutorial 1 CamsDocument10 pagesUnit 60: Dynamics of Machines: Outcome 2 - Kinematics and Dynamics Tutorial 1 CamsAlaa ShammaaNo ratings yet
- Fig.1.23 The Generation of Involute Profile On Right Side Fig.1.24 The Generation of Involute Profile On Left SideDocument12 pagesFig.1.23 The Generation of Involute Profile On Right Side Fig.1.24 The Generation of Involute Profile On Left SideBalvinderNo ratings yet
- RODA GIGI MIRING Helical GearDocument13 pagesRODA GIGI MIRING Helical GearArya PerdanaNo ratings yet
- Cylindrical Compression Helix Springs For Suspension SystemsFrom EverandCylindrical Compression Helix Springs For Suspension SystemsNo ratings yet
- 12 Beautiful Tote Purse PatternsDocument50 pages12 Beautiful Tote Purse Patternsedakeskin83100% (2)
- Mechanics of Interpretative DanceDocument2 pagesMechanics of Interpretative DanceJurryNo ratings yet
- English For Information and Technology: Chapter TwoDocument8 pagesEnglish For Information and Technology: Chapter TwoAlvaro HaryokusumoNo ratings yet
- Central Help DeskDocument5 pagesCentral Help DeskHema SahuNo ratings yet
- Product Strategy - Lec 02Document23 pagesProduct Strategy - Lec 02Mohona JesicaNo ratings yet
- Emergency DescentDocument5 pagesEmergency Descentpraveenpillai83No ratings yet
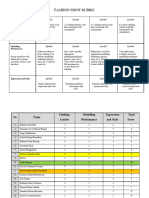
- Fashion Show Rubric: Clothing Articles Level 1 Level 2 Level 3 Level 4Document2 pagesFashion Show Rubric: Clothing Articles Level 1 Level 2 Level 3 Level 4BALQIS NURAZIZAHNo ratings yet
- Guitar Songs ListDocument72 pagesGuitar Songs Listsandeep0% (2)
- Planning The ONS 6800Document46 pagesPlanning The ONS 6800rafael antonio padilla mayorgaNo ratings yet
- Mea Tormenta ProperateDocument14 pagesMea Tormenta ProperateLeo ZappitelliNo ratings yet
- Thesis Joseph SchmittDocument141 pagesThesis Joseph SchmittdaigoryuuNo ratings yet
- Ahmad Aljebaly Department of Computer Science Western Michigan UniversityDocument42 pagesAhmad Aljebaly Department of Computer Science Western Michigan UniversityArushi MittalNo ratings yet
- Meetings & Facilities Guide: Gaylord Opryland Resort & Convention CenterDocument19 pagesMeetings & Facilities Guide: Gaylord Opryland Resort & Convention CenterScott HerrickNo ratings yet
- Sir Alex Ferguson LeadershipDocument11 pagesSir Alex Ferguson LeadershipJhanzaib Aslam100% (2)
- Date Day Concert Sponsors/ Charity Supported Venue Start TimeDocument1 pageDate Day Concert Sponsors/ Charity Supported Venue Start TimeDursleyMVCNo ratings yet
- Descriptive Chart of Basic Skating Skills: Skating Edges Skill LevelsDocument6 pagesDescriptive Chart of Basic Skating Skills: Skating Edges Skill LevelsJ9 Yu100% (1)
- BIAS Amp Product ChartDocument4 pagesBIAS Amp Product ChartMarco ZamoranoNo ratings yet
- Avigilon H4SL Dome Datasheet ENDocument4 pagesAvigilon H4SL Dome Datasheet ENGuillermo García GándaraNo ratings yet
- Curse of The Harvester (Dream Jumper, Book 2) ExcerptDocument30 pagesCurse of The Harvester (Dream Jumper, Book 2) ExcerptI Read YA67% (3)
- Spilt MilkDocument9 pagesSpilt Milkbhawna ranaNo ratings yet
- Manual Book Avanza IndonesiaDocument327 pagesManual Book Avanza IndonesiaSMK Mitra PasundanNo ratings yet
- Multimedia Programming GuideDocument34 pagesMultimedia Programming GuideIron ForceNo ratings yet
- TRI105.DTA .002 Veefil-PK350-SpecificationsDocument3 pagesTRI105.DTA .002 Veefil-PK350-SpecificationsCarlos AndradeNo ratings yet
- Experience Guide Quarter 2 - Music 7 Lesson 8: RondallaDocument5 pagesExperience Guide Quarter 2 - Music 7 Lesson 8: RondallaLeonel lapinaNo ratings yet
- Carly Rae JepsenDocument3 pagesCarly Rae JepsenElizabethNo ratings yet
- Engineering CurvesDocument8 pagesEngineering CurvesHriejriejeiNo ratings yet
- Up1011 A4 LetterDocument20 pagesUp1011 A4 Letterclara martinezNo ratings yet
- Lesson 4.7 - Philippine LiteratureDocument24 pagesLesson 4.7 - Philippine LiteratureAlyssa BobadillaNo ratings yet
- Tag Questions - Exercise - 1Document1 pageTag Questions - Exercise - 1FernandaRamirez100% (1)
- 5 Themes of Geography: Universal StudiosDocument13 pages5 Themes of Geography: Universal Studiosapi-549496737No ratings yet