You might also like
- Kinematics Robot Control: (2DOF Manipulator & Mobile Robot) (2DOF Manipulator & Mobile Robot)Document14 pagesKinematics Robot Control: (2DOF Manipulator & Mobile Robot) (2DOF Manipulator & Mobile Robot)muhammad_wafi_6No ratings yet
- Localization Path Planning Mobile Robot: Dead Reckoning (DR) Is TheDocument9 pagesLocalization Path Planning Mobile Robot: Dead Reckoning (DR) Is ThesepritaharaNo ratings yet
- DV - 04 - Vehicles Equation of MotionDocument12 pagesDV - 04 - Vehicles Equation of MotionNeerajNo ratings yet
- EL-4701 Modelos de Sistemas: FormularioDocument9 pagesEL-4701 Modelos de Sistemas: FormularioEmmanuel AcostaNo ratings yet
- Two Machine System Pu ModelDocument14 pagesTwo Machine System Pu ModelDinesh ShettyNo ratings yet
- Variable Structure Control Mechanical Systems: Harry G. KwatnyDocument15 pagesVariable Structure Control Mechanical Systems: Harry G. KwatnyChernet TugeNo ratings yet
- Synchronous Machine Pu ModelDocument14 pagesSynchronous Machine Pu ModelBijuNo ratings yet
- Video Segment: ControlDocument14 pagesVideo Segment: ControliavramovNo ratings yet
- For Lab: Submitted By: Warda Tu Zahra BSEE 17-21 Dated: 23 Feb 2021Document7 pagesFor Lab: Submitted By: Warda Tu Zahra BSEE 17-21 Dated: 23 Feb 2021Warda tu ZahraNo ratings yet
- EL-4701 Modelos de Sistemas: FormularioDocument9 pagesEL-4701 Modelos de Sistemas: FormularioAngel RamirezNo ratings yet
- Stationary Time SeriesDocument21 pagesStationary Time SeriesJay AydinNo ratings yet
- Polar Equations To RectangularDocument2 pagesPolar Equations To RectangularThrow AwayNo ratings yet
- Project ReportDocument19 pagesProject ReportAriel FariasNo ratings yet
- Computer GraphicsDocument325 pagesComputer Graphicssadhanamca1No ratings yet
- JacobianDocument32 pagesJacobianAniqua Ali100% (1)
- DC DrivesDocument50 pagesDC DrivesjvilasisNo ratings yet
- Variable Structure Control 3 Motor Control: Harry G. KwatnyDocument15 pagesVariable Structure Control 3 Motor Control: Harry G. KwatnyChernet TugeNo ratings yet
- Vector FormulaeDocument16 pagesVector FormulaeahsbonNo ratings yet
- 05874758Document4 pages05874758جمال طيبيNo ratings yet
- Fourier ContDocument3 pagesFourier Contluiso92No ratings yet
- Aproximacion de Born-OppenheimerDocument9 pagesAproximacion de Born-OppenheimerDavid ReyesNo ratings yet
- Assignment EE 4202Document10 pagesAssignment EE 4202Chanki P PyrbotNo ratings yet
- Bab VI. Perencanaan Trayektori (Trajectory Planning)Document78 pagesBab VI. Perencanaan Trayektori (Trajectory Planning)Anindita Yurianti MNo ratings yet
- MAE546 Lecture 10Document14 pagesMAE546 Lecture 10Shivan BiradarNo ratings yet
- Control Systems Formula SheetDocument12 pagesControl Systems Formula SheetliamhrNo ratings yet
- MatlabDocument14 pagesMatlabDiana UlloaNo ratings yet
- Quadstripped 150226205933 Conversion Gate01Document69 pagesQuadstripped 150226205933 Conversion Gate01石大明No ratings yet
- Ball and Beam Dynamics - Full ModelDocument9 pagesBall and Beam Dynamics - Full ModelMarco SouzaNo ratings yet
- Z TransformDocument85 pagesZ TransformAhmad Arif SaktiNo ratings yet
- Zarchan-Lecture Kalman Filter9Document104 pagesZarchan-Lecture Kalman Filter9larasmoyoNo ratings yet
- Q.No.2 Using MATLAB, Calculate and Plot The Torque-Speed Characteristics of The Above Motor Both With The Original Rotor Resistance and With The Rotor Resistance DoubledDocument6 pagesQ.No.2 Using MATLAB, Calculate and Plot The Torque-Speed Characteristics of The Above Motor Both With The Original Rotor Resistance and With The Rotor Resistance DoubledKhalid AkramNo ratings yet
- Induction MotorDocument65 pagesInduction MotorAnthony ZambranoNo ratings yet
- Nyquist I Bode ZadaciDocument29 pagesNyquist I Bode ZadaciNikola HardiNo ratings yet
- Dynamics FormulasDocument1 pageDynamics Formulasabdulrehman786No ratings yet
- ECE 5650/4650 Tables For Exam I: Sequence Sum FormulasDocument3 pagesECE 5650/4650 Tables For Exam I: Sequence Sum Formulasue06037No ratings yet
- Z TransformDocument21 pagesZ TransformAntonio MartinezNo ratings yet
- Serii Tempoale Arma StationareDocument35 pagesSerii Tempoale Arma StationareCristinel MaileanuNo ratings yet
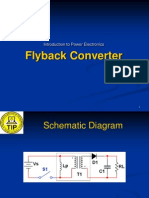
- Lesson 9 - Flyback ConverterDocument31 pagesLesson 9 - Flyback ConverterJhana Kimberly S. AquinoNo ratings yet
- Rumus Matematika Sma InterDocument19 pagesRumus Matematika Sma InterAde JayusNo ratings yet
- WS5 Lecture2Document3 pagesWS5 Lecture2andriusjaya787No ratings yet
- Exam - 2011 10 28Document5 pagesExam - 2011 10 28lieth-4No ratings yet
- Fourier Transform TablesDocument9 pagesFourier Transform TablesOrder17No ratings yet
- 03 LagrangianDynamics 1Document28 pages03 LagrangianDynamics 1Terence DengNo ratings yet
- Dynamic ExcitationsDocument23 pagesDynamic ExcitationsRaquel CarmonaNo ratings yet
- F C D I: Ormulario de Álculo Iferencial E NtegralDocument2 pagesF C D I: Ormulario de Álculo Iferencial E NtegralSergio Jimenez ZarzaNo ratings yet
- Exam MSSM 2009-07-07 SolutionDocument9 pagesExam MSSM 2009-07-07 SolutionBomber KillerNo ratings yet
- LinkagesDocument29 pagesLinkagesRubén GonzálezNo ratings yet
- Balance MolarDocument38 pagesBalance MolarAna Sofia IndriagoNo ratings yet
- Clase 3 Calculo Numerico II - PGRA - 2024 - 1Document41 pagesClase 3 Calculo Numerico II - PGRA - 2024 - 1botametunosegaNo ratings yet
- Week 3 MatlabDocument7 pagesWeek 3 MatlabFERHAT BODURNo ratings yet
- Integrala Nedefinita Fisa BRGDocument4 pagesIntegrala Nedefinita Fisa BRGTatiana MiluNo ratings yet
- Calculus 2 SummaryDocument2 pagesCalculus 2 Summarydukefvr41No ratings yet
- J-MCRN R: BUET Admission Test 2018-2019Document15 pagesJ-MCRN R: BUET Admission Test 2018-2019Nam neiNo ratings yet
- 12 - Derivatele Functiilor ElementareDocument1 page12 - Derivatele Functiilor ElementareGory Gory GorylaNo ratings yet
- Answers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesFrom EverandAnswers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesRating: 1.5 out of 5 stars1.5/5 (2)
- Ten-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesFrom EverandTen-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesNo ratings yet
- Robot Manipulators: Modeling, Performance Analysis and ControlFrom EverandRobot Manipulators: Modeling, Performance Analysis and ControlNo ratings yet