You might also like
- Robot Manipulators: Modeling, Performance Analysis and ControlFrom EverandRobot Manipulators: Modeling, Performance Analysis and ControlNo ratings yet
- Position Control of 6DOF's Manipulator Robot by Haider Hashim - PPTDocument24 pagesPosition Control of 6DOF's Manipulator Robot by Haider Hashim - PPTHaiderNo ratings yet
- An Introduction To Robotic ManipulatorsDocument29 pagesAn Introduction To Robotic ManipulatorsAyush_Rai_2506No ratings yet
- Module 11: Example Study of Robots Lecture 39: PUMA Robots-A Case Study ObjectivesDocument9 pagesModule 11: Example Study of Robots Lecture 39: PUMA Robots-A Case Study ObjectivesNkugwa Mark WilliamNo ratings yet
- Teme - 1 (Revision) Some Basic Concepts in Robots Manipulator-Ver 1. of Doz Ivan Avramov 28 Jan 2021Document28 pagesTeme - 1 (Revision) Some Basic Concepts in Robots Manipulator-Ver 1. of Doz Ivan Avramov 28 Jan 2021stanimirNo ratings yet
- Delta Ia-Robot DRS-DRV PM en 20181102Document98 pagesDelta Ia-Robot DRS-DRV PM en 20181102Cristobal PerezNo ratings yet
- Openfoamrotatinggeometryenglish20140518 140517222323 Phpapp01 PDFDocument59 pagesOpenfoamrotatinggeometryenglish20140518 140517222323 Phpapp01 PDFDinesh TPNo ratings yet
- 3 Mechanisms Position AnalysisDocument103 pages3 Mechanisms Position AnalysisMix TubeNo ratings yet
- EE-381 Robotics-1 Denavit-Hartenberg (DH) NotationDocument40 pagesEE-381 Robotics-1 Denavit-Hartenberg (DH) NotationMuhammad Usama Bin TahirNo ratings yet
- Virtual modelling of robotic kinematics and dynamicsDocument13 pagesVirtual modelling of robotic kinematics and dynamicsBehind SilhouetteNo ratings yet
- Robotics Automation Forward Kinematics (RAFKDocument20 pagesRobotics Automation Forward Kinematics (RAFKMoathNo ratings yet
- Direct Kinematics: Robotics 1Document33 pagesDirect Kinematics: Robotics 1Jorge Ballesteros CaceresNo ratings yet
- Fanuc Intro UpDocument112 pagesFanuc Intro UpSakalrobo100% (2)
- Lecture 2 ADocument43 pagesLecture 2 ASadia AltafNo ratings yet
- Lecture 2 ADocument43 pagesLecture 2 AWolf DragonneNo ratings yet
- Contest Task 1.9Document16 pagesContest Task 1.9MarkNo ratings yet
- Rotordynamic Analysis Using ANSYS Mechanical APDL With The Rotor Modeled by Beam ElementDocument7 pagesRotordynamic Analysis Using ANSYS Mechanical APDL With The Rotor Modeled by Beam Elementmick.pride81No ratings yet
- 2017EIR221T9 2017EIR221T9: EIR 221 Tutorial Assignment 9: EIR 221 Tutoriaal Werksopdrag 9Document3 pages2017EIR221T9 2017EIR221T9: EIR 221 Tutorial Assignment 9: EIR 221 Tutoriaal Werksopdrag 9Tiehan NelNo ratings yet
- Innovative Kinematics and Control To Improve Robot SpatialDocument6 pagesInnovative Kinematics and Control To Improve Robot SpatialEmir NumanovicNo ratings yet
- Kinematics of RobotsDocument42 pagesKinematics of RobotsRakeshSainiNo ratings yet
- Robotics Module Trajectory Generation ProgrammingDocument50 pagesRobotics Module Trajectory Generation Programmingmanikandannadar100% (1)
- Robot Kinematics Chapter SummaryDocument35 pagesRobot Kinematics Chapter SummaryArunkumar MyakalaNo ratings yet
- Chapter 04 - Direct & Inverse KinematicsDocument82 pagesChapter 04 - Direct & Inverse KinematicsHuỳnh SơnNo ratings yet
- Robotics Report On ABB IRBDocument19 pagesRobotics Report On ABB IRBkingdom23420% (1)
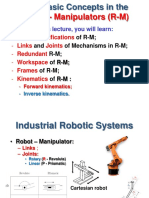
- Theme 2 (Revision) Introduction of Industrial Robot - Manipulators - Ver 1. of Doz Ivan Avramov 28 Jan 2021Document48 pagesTheme 2 (Revision) Introduction of Industrial Robot - Manipulators - Ver 1. of Doz Ivan Avramov 28 Jan 2021stanimirNo ratings yet
- Chapter 2Document59 pagesChapter 2Saksopheaktra PhoNo ratings yet
- Forward and Inverse Kinematics of Orientation: Unit - 3Document13 pagesForward and Inverse Kinematics of Orientation: Unit - 3basharat hussainNo ratings yet
- Robotics 1 Trajectory PlanningDocument30 pagesRobotics 1 Trajectory PlanningKOTIKA SOMA RAJUNo ratings yet
- Joints Types: Revolute Joint 1DOF Prismatic Joint Joint 1DOFDocument33 pagesJoints Types: Revolute Joint 1DOF Prismatic Joint Joint 1DOFf0245652No ratings yet
- The Root Locus AnalysisDocument56 pagesThe Root Locus AnalysisJpradha KamalNo ratings yet
- ROBOTICS KINEMATICSDocument56 pagesROBOTICS KINEMATICSharshaNo ratings yet
- ME424 201516 Unit4Document56 pagesME424 201516 Unit4venkateshNo ratings yet
- Chapter 03-Kinematics of RobotsDocument40 pagesChapter 03-Kinematics of RobotsHuỳnh SơnNo ratings yet
- Robotics PDFDocument25 pagesRobotics PDFSonosoNo ratings yet
- MEC509J2NT2Document12 pagesMEC509J2NT2thamizmani100% (1)
- Forward and Inverse Kinematics GuideDocument45 pagesForward and Inverse Kinematics GuideNazlıcan DönmezNo ratings yet
- Mechanisms: Prof - Dr.ing. Csaba AntonyaDocument26 pagesMechanisms: Prof - Dr.ing. Csaba AntonyaGabriel IulianNo ratings yet
- Chapter 2 - Robot KinematicsDocument35 pagesChapter 2 - Robot KinematicsShitnu SuwanNo ratings yet
- 04_dynamicModelsDocument22 pages04_dynamicModels21139019No ratings yet
- Industrial Robotics ME5510: IntroductionDocument24 pagesIndustrial Robotics ME5510: Introductionabdul rahmanNo ratings yet
- Introduction To Robotics: Amitabha MukerjeeDocument54 pagesIntroduction To Robotics: Amitabha MukerjeeVaibhav SharmaNo ratings yet
- 08 Robotics F16MTE Path and Trajectory PlanningDocument21 pages08 Robotics F16MTE Path and Trajectory PlanningasadNo ratings yet
- Assignment 1Document12 pagesAssignment 1Germán Gallardo DuránNo ratings yet
- Chapter 2 Spatial Descriptions and TransformationsDocument99 pagesChapter 2 Spatial Descriptions and TransformationsKeith wongNo ratings yet
- Kinematics of Robots: Alba Perez GraciaDocument15 pagesKinematics of Robots: Alba Perez GraciaLin JiangNo ratings yet
- Robot Dynamics: 1 DefinitionDocument6 pagesRobot Dynamics: 1 Definitionalagar krishna kumarNo ratings yet
- EE-381 Robotics-1 Lecture Notes on Robotic ManipulatorsDocument34 pagesEE-381 Robotics-1 Lecture Notes on Robotic ManipulatorsWolf DragonneNo ratings yet
- Week 6 - Stability of Linear Control Systems - PDFDocument45 pagesWeek 6 - Stability of Linear Control Systems - PDFgigoNo ratings yet
- Lab+01-Itr (1) Intro To RoboticsDocument11 pagesLab+01-Itr (1) Intro To RoboticsEngr Hamza Ali ImranNo ratings yet
- Experimental Comparison of Trajectory Tracking Algorithms For Nonholonomic Mobile RobotsDocument6 pagesExperimental Comparison of Trajectory Tracking Algorithms For Nonholonomic Mobile RobotsdhineshpNo ratings yet
- EE-381 Robotics KinematicsDocument34 pagesEE-381 Robotics KinematicsMuhammad Usama Bin TahirNo ratings yet
- Introduction To Concepts in RoboticsDocument26 pagesIntroduction To Concepts in RoboticsزهديابوانسNo ratings yet
- 10 InverseKinematicsDocument42 pages10 InverseKinematicsAland BravoNo ratings yet
- 2 - Stability of Linear Control SystemsDocument34 pages2 - Stability of Linear Control SystemsHassan El SayedNo ratings yet
- Dynamic control of mini aerial vehiclesDocument21 pagesDynamic control of mini aerial vehiclesMaidul IslamNo ratings yet
- Standard Flow ChartDocument5 pagesStandard Flow ChartMuthukumaran SaravananNo ratings yet
- Inverse kinematics examples of 2R, 3R & 3P manipulatorsDocument10 pagesInverse kinematics examples of 2R, 3R & 3P manipulatorsOssama Ahmed MughalNo ratings yet
- PUMA RobotDocument9 pagesPUMA RobotDpk Nair100% (1)
- AA V4 I1 Mesh Morphing Accelerates Design Optimization PDFDocument2 pagesAA V4 I1 Mesh Morphing Accelerates Design Optimization PDFRapacitorNo ratings yet
- Chapter 5 - Applications of Linear EquationDocument17 pagesChapter 5 - Applications of Linear EquationMuzammil AhmedNo ratings yet
- Lecture 10 Morphological IP - 2Document45 pagesLecture 10 Morphological IP - 2Muzammil AhmedNo ratings yet
- Group members brainstorm ideas for Microsoft reportDocument10 pagesGroup members brainstorm ideas for Microsoft reportMuzammil AhmedNo ratings yet
- ESQ Introduction To Computer SystemsDocument4 pagesESQ Introduction To Computer SystemsEzzadin AbdowahabNo ratings yet
- Session 3Document31 pagesSession 3Muzammil AhmedNo ratings yet
- Fourier Law of ConductionDocument2 pagesFourier Law of ConductionMuzammil AhmedNo ratings yet
- Trans MagDocument7 pagesTrans MagJannes VegaNo ratings yet
- Getting Started With PLCDocument4 pagesGetting Started With PLCMuzammil AhmedNo ratings yet
- Introduction To Robotics Craig Solution ManualDocument154 pagesIntroduction To Robotics Craig Solution ManualChoe Jungwoo100% (1)
- Lab No 8Document1 pageLab No 8Muzammil AhmedNo ratings yet
- Q1) Take Input From The Part Using Switch and Display Part: Serial Data TransmitDocument1 pageQ1) Take Input From The Part Using Switch and Display Part: Serial Data TransmitMuzammil AhmedNo ratings yet
- Lab No 10Document1 pageLab No 10Muzammil AhmedNo ratings yet
- Lab No 9Document1 pageLab No 9Muzammil AhmedNo ratings yet
- Lab No 10 Task: Write A Program For Switching 4 Relays 1 Second For Each Using Port in BascomDocument1 pageLab No 10 Task: Write A Program For Switching 4 Relays 1 Second For Each Using Port in BascomMuzammil AhmedNo ratings yet
- Folland Real Analysis Solution Chapter 2 IntegrationDocument6 pagesFolland Real Analysis Solution Chapter 2 IntegrationEdissonArcosNo ratings yet
- Cramers RuleDocument7 pagesCramers RuleAvik MandalNo ratings yet
- CE 371 Homework No. 6 - Beam Deflection SolutionsDocument9 pagesCE 371 Homework No. 6 - Beam Deflection Solutionsamalnambiar9812174No ratings yet
- Functions and Their GraphsDocument31 pagesFunctions and Their GraphsAllyza Marie LiraNo ratings yet
- MA1203 Matematika Bisnis II Silabus 2018-2019Document2 pagesMA1203 Matematika Bisnis II Silabus 2018-2019Aldi AnugrahNo ratings yet
- Minimal PolynomialDocument5 pagesMinimal PolynomialDavidNo ratings yet
- PreCalc 2.6 NotesDocument8 pagesPreCalc 2.6 NotesFonmoaNo ratings yet
- reviewer-Math-9-Q4-2023-24 (1)Document5 pagesreviewer-Math-9-Q4-2023-24 (1)sinukshineNo ratings yet
- For More Study Material & Test Papers: Manoj Chauhan Sir (Iit-Delhi) Ex. Sr. Faculty (Bansal Classes)Document15 pagesFor More Study Material & Test Papers: Manoj Chauhan Sir (Iit-Delhi) Ex. Sr. Faculty (Bansal Classes)Vivek DasNo ratings yet
- MA5252 Problem SheetDocument3 pagesMA5252 Problem SheetKarunambika ArumugamNo ratings yet
- CH 1.9e (CH 1.10) Vector IntegrationDocument14 pagesCH 1.9e (CH 1.10) Vector IntegrationAaron MangampoNo ratings yet
- 6320 - 01a 4PM0 Paper 1 - June 2011Document28 pages6320 - 01a 4PM0 Paper 1 - June 2011rajdeepghai5607No ratings yet
- C2 A Level Maths Curve Sketching Questions AQA OCR Edexcel MEIDocument3 pagesC2 A Level Maths Curve Sketching Questions AQA OCR Edexcel MEIMohd UvaisNo ratings yet
- Bsce Calculus 2 SyllabiDocument4 pagesBsce Calculus 2 SyllabiMiguelito DapieNo ratings yet
- Design and Analysis of AlgorithmDocument47 pagesDesign and Analysis of AlgorithmAbhijit BodheNo ratings yet
- General Mathematics: Prepared byDocument32 pagesGeneral Mathematics: Prepared byJhien NethNo ratings yet
- Mathproblems Volume 1 Issue 1 SolutionsDocument3 pagesMathproblems Volume 1 Issue 1 SolutionsJuancarlos100% (1)
- Spectral Audio Signal ProcessingDocument9 pagesSpectral Audio Signal ProcessingA. Villa0% (1)
- US Navy Flow Past CylinderDocument142 pagesUS Navy Flow Past CylinderthebotycomNo ratings yet
- Factorization techniquesDocument4 pagesFactorization techniquesRusherNo ratings yet
- Fuzzy Calculus BasicsDocument13 pagesFuzzy Calculus BasicsYuri IvanovichNo ratings yet
- Stellar Stability and Asteroseismology: R. Scuflaire, A. ThoulDocument84 pagesStellar Stability and Asteroseismology: R. Scuflaire, A. ThoulHadjer JojoNo ratings yet
- Chem 373 - Lecture 29: The Variation TheoremDocument20 pagesChem 373 - Lecture 29: The Variation TheoremNuansak3No ratings yet
- Docon PDFDocument70 pagesDocon PDFAulia RahmanNo ratings yet
- Sequences and Series ExplainedDocument21 pagesSequences and Series Explainedkaziba stephenNo ratings yet
- Cameron C. Microeconometrics Using Stata Vol II. 2ed 2022Document1,198 pagesCameron C. Microeconometrics Using Stata Vol II. 2ed 2022andresekundaNo ratings yet
- MATH333: Numerical Analysis Lab 6 Polynomial InterpolationDocument3 pagesMATH333: Numerical Analysis Lab 6 Polynomial InterpolationHussain RizviNo ratings yet
- Mathematical RelayDocument3 pagesMathematical RelaymathsocietyNo ratings yet
- Summative 4.3 - IntegralDocument2 pagesSummative 4.3 - IntegralChristine Angelie GranadaNo ratings yet
- BookDocument583 pagesBookpetruNo ratings yet