You might also like
- RwRuuEEmT5y6DNPfCmx8 Statistical Physics Lecture Notes 2023Document18 pagesRwRuuEEmT5y6DNPfCmx8 Statistical Physics Lecture Notes 2023KINGZJCNo ratings yet
- Lanh Trang 14 18Document5 pagesLanh Trang 14 18Hoàng HứaNo ratings yet
- Aitchison, Hey, Solutions To Problems in 'Gauge Theories in Particle Physics', 3rd. Edn., Vol. 1, From Relativistic Quantum Mechanics To QED PDFDocument54 pagesAitchison, Hey, Solutions To Problems in 'Gauge Theories in Particle Physics', 3rd. Edn., Vol. 1, From Relativistic Quantum Mechanics To QED PDFBrandon Stephens100% (1)
- Robot Modelling and Control PDFDocument10 pagesRobot Modelling and Control PDFalper senemNo ratings yet
- SV4 TLine Eq, Z0Document7 pagesSV4 TLine Eq, Z0AjayNo ratings yet
- FossenRoss IEEContEng 2006Document29 pagesFossenRoss IEEContEng 2006Emily JulianaNo ratings yet
- 1 Problem 3.5: Cameron Cianci February 24, 2021Document5 pages1 Problem 3.5: Cameron Cianci February 24, 2021nopeNo ratings yet
- WuDocument21 pagesWuCarolina RibeiroNo ratings yet
- Lecture 3: Spherical Waves: Near & Far Field, Radiation Impedance, and Simple SourcesDocument12 pagesLecture 3: Spherical Waves: Near & Far Field, Radiation Impedance, and Simple SourcesGANESHNo ratings yet
- 10 1680@vosasuml 35393 0003 PDFDocument11 pages10 1680@vosasuml 35393 0003 PDFLê Hoài ThươngNo ratings yet
- PGT 2023Document20 pagesPGT 2023bhuppi KumarNo ratings yet
- 08 Chapter 5Document67 pages08 Chapter 5Yaazhini SiddharthNo ratings yet
- Ps 8Document3 pagesPs 8Muskan BuraNo ratings yet
- Oscillation HarbourDocument30 pagesOscillation HarbourmmmNo ratings yet
- ErrataDocument3 pagesErrataZak BelNo ratings yet
- RocketDocument19 pagesRocketTofik KemalNo ratings yet
- Chapter Two - Central ForcesDocument20 pagesChapter Two - Central ForcesODUR JamesNo ratings yet
- Chap 3Document40 pagesChap 3eshbliNo ratings yet
- Poisson's Equation in Electrostatics: Jinn-Liang LiuDocument7 pagesPoisson's Equation in Electrostatics: Jinn-Liang Liuaslam janNo ratings yet
- Notes Inviscid Stability SHDocument24 pagesNotes Inviscid Stability SHamrif89No ratings yet
- FMDocument7 pagesFMSusie MaestreNo ratings yet
- Vectors DPPDocument13 pagesVectors DPPAchyuth DaggumatiNo ratings yet
- Assignment 4 (Vector Calculus)Document6 pagesAssignment 4 (Vector Calculus)Shail BajpaiNo ratings yet
- 978 0 387 37748 3 - BookBackMatterDocument16 pages978 0 387 37748 3 - BookBackMatterceedupaco9470No ratings yet
- Dyadic Wavelets and Refinable Functions On A Half-LineDocument30 pagesDyadic Wavelets and Refinable Functions On A Half-LineukoszapavlinjeNo ratings yet
- Uniform Relativistic Acceleration PDFDocument15 pagesUniform Relativistic Acceleration PDFJedwin VillanuevaNo ratings yet
- Dynamic PMSM ModellingDocument24 pagesDynamic PMSM Modellingdirekap280No ratings yet
- IV. Analysis of SDOF Systems (Or Modal Equations) : Term 1, 2020Document27 pagesIV. Analysis of SDOF Systems (Or Modal Equations) : Term 1, 2020Faiz MalikNo ratings yet
- Numerical - Simulation - of - The - Effect - of - Wind - On THE MISSILE MOTIONDocument10 pagesNumerical - Simulation - of - The - Effect - of - Wind - On THE MISSILE MOTIONscorpion_l_81No ratings yet
- Performance of Tuned Liquid Dampers With Different Tank Geometries For Vibration Control of StructuresDocument9 pagesPerformance of Tuned Liquid Dampers With Different Tank Geometries For Vibration Control of StructuresVishalNo ratings yet
- Ch1 Lorentz Group & Lorentz InvariantDocument32 pagesCh1 Lorentz Group & Lorentz InvariantKhalid PatmawijayaNo ratings yet
- Kinema TicsDocument66 pagesKinema TicsManauwar AnsariNo ratings yet
- PHY 5246: Theoretical Dynamics, Fall 2015 September 28, 2015 Midterm Exam # 1Document9 pagesPHY 5246: Theoretical Dynamics, Fall 2015 September 28, 2015 Midterm Exam # 1Jennifer RibeiroNo ratings yet
- ME 380 Chapter 2 HW Solution: Review QuestionsDocument5 pagesME 380 Chapter 2 HW Solution: Review QuestionsVisakan ParameswaranNo ratings yet
- Local Existence and Blow-Up Criterion of 3D Ideal Magnetohydrodynamics EquationsDocument8 pagesLocal Existence and Blow-Up Criterion of 3D Ideal Magnetohydrodynamics EquationsNo FaceNo ratings yet
- Bat Dang Thuc Luong GiacDocument8 pagesBat Dang Thuc Luong Giacapi-19473489No ratings yet
- Classical Mechanics Motion Under Central ForcesDocument16 pagesClassical Mechanics Motion Under Central Forcessudipta paulNo ratings yet
- Linear Stochastic Differential Equations With Anticipating Initial ConditionsDocument9 pagesLinear Stochastic Differential Equations With Anticipating Initial ConditionsaqszaqszNo ratings yet
- Geometric Design-SIMPLE CURVEDocument4 pagesGeometric Design-SIMPLE CURVEJezreel PatawaranNo ratings yet
- Derivation of The Rydberg Equation From Bohrs Model HandoutDocument3 pagesDerivation of The Rydberg Equation From Bohrs Model HandoutTsitsi BasimaneNo ratings yet
- MA111 Lec8 D3D4Document33 pagesMA111 Lec8 D3D4pahnhnykNo ratings yet
- Progress in Electromagnetics Research B, Vol. 33, 69-82, 2011Document14 pagesProgress in Electromagnetics Research B, Vol. 33, 69-82, 2011Abdul Salam AdunolaNo ratings yet
- c2 PDFDocument26 pagesc2 PDFagNo ratings yet
- Ken I MaticsDocument45 pagesKen I MaticsEdward OropezaNo ratings yet
- 02 - Single Particle MotionDocument12 pages02 - Single Particle MotionSamNo ratings yet
- RVbookErrata PDFDocument3 pagesRVbookErrata PDFP J BNo ratings yet
- EC1 WindDocument10 pagesEC1 Windandre_vicenteNo ratings yet
- Curvilinear Coordinates Arfken 5th EdDocument14 pagesCurvilinear Coordinates Arfken 5th EdManoj SNo ratings yet
- Article - On Formulae For Roots of Cubic EquationDocument10 pagesArticle - On Formulae For Roots of Cubic EquationmhdrNo ratings yet
- Analysis of Capacitively Coupled Microstrip-Ring Resonator Based On Spectral Domain Method R. Rezaiesarlak and F. HodjatkashaniDocument9 pagesAnalysis of Capacitively Coupled Microstrip-Ring Resonator Based On Spectral Domain Method R. Rezaiesarlak and F. HodjatkashaniAhmed JavedNo ratings yet
- PHAS1247 Classical Mechanics: Exam 2017Document8 pagesPHAS1247 Classical Mechanics: Exam 2017Don QuixoteNo ratings yet
- Emfesoln chp11 PDFDocument37 pagesEmfesoln chp11 PDFRengganis Putri ParmudyaNo ratings yet
- Pells MethodDocument9 pagesPells MethodSoumyabrataPatraNo ratings yet
- Appendix A Mohr's Circle For Two-Dimensional StressDocument13 pagesAppendix A Mohr's Circle For Two-Dimensional StressSi MonaNo ratings yet
- PHYS 419: Classical Mechanics Lecture Notes: I. Work and EnergyDocument8 pagesPHYS 419: Classical Mechanics Lecture Notes: I. Work and EnergySanu Kaji MaharjanNo ratings yet
- Generating Functions For Bessel FunctionsDocument8 pagesGenerating Functions For Bessel FunctionsEnitz SosaNo ratings yet
- C2 Elements of Linear System TheoryDocument26 pagesC2 Elements of Linear System TheoryBui Tuan Viet LongNo ratings yet
- KeplerDocument6 pagesKeplerbartup2No ratings yet
- BE CV Nomi2-2Document2 pagesBE CV Nomi2-2rana ali sufianNo ratings yet
- Government of Pakistan Ministry of Inter Provincial Coordination, IslamabadDocument3 pagesGovernment of Pakistan Ministry of Inter Provincial Coordination, Islamabadrana ali sufianNo ratings yet
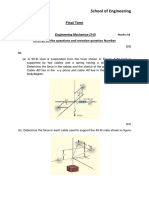
- Engineering Mechanics Final PPRDocument3 pagesEngineering Mechanics Final PPRrana ali sufianNo ratings yet
- Application Print PDFDocument2 pagesApplication Print PDFrana ali sufianNo ratings yet
- Lec2012 3 159741 FuzzyLogic v.2 PDFDocument131 pagesLec2012 3 159741 FuzzyLogic v.2 PDFrana ali sufianNo ratings yet
- Mechanism Design: A SeriesDocument3 pagesMechanism Design: A Seriesamirmasood kholojiniNo ratings yet
- Second Advent Herald (When God Stops Winking (Understanding God's Judgments) )Document32 pagesSecond Advent Herald (When God Stops Winking (Understanding God's Judgments) )Adventist_TruthNo ratings yet
- HPE 3PAR StoreServ 20000 Storage Service and Upgrade Guide Service EditionDocument282 pagesHPE 3PAR StoreServ 20000 Storage Service and Upgrade Guide Service Editionben boltNo ratings yet
- 02-09-18 SR - IZ Jee-Adv 2011-P1 PTA-03 Q PDFDocument31 pages02-09-18 SR - IZ Jee-Adv 2011-P1 PTA-03 Q PDFswarupNo ratings yet
- Defect Origin (J) Phase Requirement Analysis Design Coding Unit TestingDocument87 pagesDefect Origin (J) Phase Requirement Analysis Design Coding Unit Testingashish_jain_csNo ratings yet
- TXN Alarms 18022014Document12 pagesTXN Alarms 18022014Sid GrgNo ratings yet
- NDT Matrix 12-99-90-1710 - Rev.2 PDFDocument2 pagesNDT Matrix 12-99-90-1710 - Rev.2 PDFEPC NCCNo ratings yet
- IMCI UpdatedDocument5 pagesIMCI UpdatedMalak RagehNo ratings yet
- Safety Procedures For Vertical Formwork PDFDocument17 pagesSafety Procedures For Vertical Formwork PDFbalya7No ratings yet
- Chapter 01Document16 pagesChapter 01deepak_baidNo ratings yet
- UntitledDocument413 pagesUntitledjgj38j90No ratings yet
- Digital ElectronicsDocument18 pagesDigital ElectronicsHarry BeggyNo ratings yet
- Etl 213-1208.10 enDocument1 pageEtl 213-1208.10 enhossamNo ratings yet
- Assignment 1 - Statistics ProbabilityDocument3 pagesAssignment 1 - Statistics ProbabilityAzel Fume100% (1)
- Proknow VersionDocument21 pagesProknow Versionapi-392523563No ratings yet
- Holowicki Ind5Document8 pagesHolowicki Ind5api-558593025No ratings yet
- Technical Design of The Bukwimba Open Pit Final 12042017Document31 pagesTechnical Design of The Bukwimba Open Pit Final 12042017Rozalia PengoNo ratings yet
- Water Chemistry - An Introduction To The Chemistry of Natural and Engineered Aquatic Systems-Páginas-483-492Document10 pagesWater Chemistry - An Introduction To The Chemistry of Natural and Engineered Aquatic Systems-Páginas-483-492jhonier guevaraNo ratings yet
- Biasing Opamps Into Class ADocument11 pagesBiasing Opamps Into Class AsddfsdcascNo ratings yet
- Dwnload Full Psychology Core Concepts 7th Edition Zimbardo Test Bank PDFDocument13 pagesDwnload Full Psychology Core Concepts 7th Edition Zimbardo Test Bank PDFcomfortdehm1350100% (7)
- Bahasa Inggris PATDocument10 pagesBahasa Inggris PATNilla SumbuasihNo ratings yet
- The Latent Phase of LaborDocument8 pagesThe Latent Phase of LaborLoisana Meztli Figueroa PreciadoNo ratings yet
- Syllabi: The Institution of Engineers, Sri LankaDocument107 pagesSyllabi: The Institution of Engineers, Sri LankaAmal Priyashantha Perera100% (2)
- Product Specifications: MB3F-PSA4-19DEDocument2 pagesProduct Specifications: MB3F-PSA4-19DEВадим ЧеховскийNo ratings yet
- Setting Times of ConcreteDocument3 pagesSetting Times of ConcreteP DhanunjayaNo ratings yet
- Ceu Guidance Problematic Bleeding Hormonal ContraceptionDocument28 pagesCeu Guidance Problematic Bleeding Hormonal Contraceptionmarina_shawkyNo ratings yet
- Syllabus (402050B) Finite Element Analysis (Elective IV)Document3 pagesSyllabus (402050B) Finite Element Analysis (Elective IV)shekhusatavNo ratings yet
- Pelton2014 Para-Equilibrium Phase DiagramsDocument7 pagesPelton2014 Para-Equilibrium Phase DiagramsAbraham Becerra AranedaNo ratings yet
- Outerstellar Self-Impose RulesDocument1 pageOuterstellar Self-Impose RulesIffu The war GodNo ratings yet
- Science: The Menstrual CycleDocument4 pagesScience: The Menstrual CycleLena Beth Tapawan YapNo ratings yet