You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (843)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5810)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (346)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- BRS Form No. 1: Page 1 of 12Document12 pagesBRS Form No. 1: Page 1 of 12Yuri ValenciaNo ratings yet
- AASHTO T 311 - Grain-Size Analysis of Granular MaterialsDocument10 pagesAASHTO T 311 - Grain-Size Analysis of Granular MaterialsYuri Valencia100% (1)
- Coagulation and Flocculation in Water and Wastewater Treatment PDFDocument19 pagesCoagulation and Flocculation in Water and Wastewater Treatment PDFSayan KirinathanNo ratings yet
- Heat Treatment of Steel PDFDocument8 pagesHeat Treatment of Steel PDFkaviatchennai100% (2)
- Double Angle CleatsDocument6 pagesDouble Angle CleatsKaushal KishoreNo ratings yet
- AASHTO T 272 - Standard Method of Test For One-Point Method For Determining Maximum DryDocument5 pagesAASHTO T 272 - Standard Method of Test For One-Point Method For Determining Maximum DryYuri ValenciaNo ratings yet
- Separator Sizing SpreadsheetDocument10 pagesSeparator Sizing SpreadsheetEmmanuel ByensitaNo ratings yet
- Pipe NB, DN and Table of Pipe Size & ScheduleDocument4 pagesPipe NB, DN and Table of Pipe Size & SchedulepandyasaurabhNo ratings yet
- Edward WittenDocument8 pagesEdward WittenAceeNo ratings yet
- Fiber Optic Exam 1Document7 pagesFiber Optic Exam 1eaay007No ratings yet
- 04 - Atterberg Limits of SoilDocument21 pages04 - Atterberg Limits of SoilYuri ValenciaNo ratings yet
- 01 - Soils and Soil AggregatesDocument28 pages01 - Soils and Soil AggregatesYuri ValenciaNo ratings yet
- 4c Status Report On Star Rating of DPWH Reg'l. & District Matl's. Testing Labs.Document8 pages4c Status Report On Star Rating of DPWH Reg'l. & District Matl's. Testing Labs.Yuri ValenciaNo ratings yet
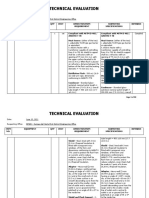
- Technical Evaluation - Surigao Del Norte 1stDocument32 pagesTechnical Evaluation - Surigao Del Norte 1stYuri ValenciaNo ratings yet
- Revision History Revision No. Issue Date DescriptionDocument2 pagesRevision History Revision No. Issue Date DescriptionYuri ValenciaNo ratings yet
- Proj Managemnt Batch 1 PDFDocument30 pagesProj Managemnt Batch 1 PDFYuri ValenciaNo ratings yet
- Problem SetDocument16 pagesProblem SetYuri ValenciaNo ratings yet
- MOR Project ProfileDocument1 pageMOR Project ProfileYuri ValenciaNo ratings yet
- De Chavez, Von Jovi A. PONCE, Benedict E. Valencia, Yuri M. VELICARIA, Gerard Jude S. CE231 - Advanced Foundation Design 27 July 2019Document17 pagesDe Chavez, Von Jovi A. PONCE, Benedict E. Valencia, Yuri M. VELICARIA, Gerard Jude S. CE231 - Advanced Foundation Design 27 July 2019Yuri ValenciaNo ratings yet
- Orca Share Media1578444420609Document1 pageOrca Share Media1578444420609Yuri ValenciaNo ratings yet
- Nestor B. Caoile: Engineer VDocument9 pagesNestor B. Caoile: Engineer VYuri ValenciaNo ratings yet
- Application Form For Upgrading of Rank 2Document2 pagesApplication Form For Upgrading of Rank 2Yuri ValenciaNo ratings yet
- Official Receipt PDFDocument1 pageOfficial Receipt PDFYuri Valencia0% (1)
- Executive Summary Contract Agreement: FOR: Undersecretary EMIL K. SADAIN, CESO IDocument1 pageExecutive Summary Contract Agreement: FOR: Undersecretary EMIL K. SADAIN, CESO IYuri ValenciaNo ratings yet
- Series Solution of Differential Equations and Special FunctionsDocument64 pagesSeries Solution of Differential Equations and Special FunctionsNitesh SinghNo ratings yet
- Corexy 04926139Document11 pagesCorexy 04926139CicciputtNo ratings yet
- Delivery Information Sheet ScienceDocument15 pagesDelivery Information Sheet ScienceRODNIE GUBATONNo ratings yet
- Module 7 PhysicsDocument37 pagesModule 7 PhysicsBernice AngelNo ratings yet
- E KMT CatalogDocument164 pagesE KMT CatalogzoranmiskovicNo ratings yet
- Design and Analysis of A Fixed-Wing Unmanned Aerial-Aquatic VehicleDocument8 pagesDesign and Analysis of A Fixed-Wing Unmanned Aerial-Aquatic VehicleWinston YangNo ratings yet
- Microwave Communication System Design Linking The Tambang Point and Municipality of Makahadok, Quezon ProvinceDocument5 pagesMicrowave Communication System Design Linking The Tambang Point and Municipality of Makahadok, Quezon ProvinceVlad V WalachiaNo ratings yet
- Fuzzy Numbers and Their ApplicationsDocument5 pagesFuzzy Numbers and Their ApplicationsStar MongerNo ratings yet
- Specification 01286 SPE EPC 302 210 0001 IFB0-01Document27 pagesSpecification 01286 SPE EPC 302 210 0001 IFB0-01minakirolosNo ratings yet
- Ba00294pen 1513 PDFDocument96 pagesBa00294pen 1513 PDFJigyesh SharmaNo ratings yet
- SEW Eurodrive Planetary Servo Gear UnitsDocument277 pagesSEW Eurodrive Planetary Servo Gear UnitsJ M Marín LópezNo ratings yet
- Study PlanDocument2 pagesStudy Planandres887100% (2)
- Chapter 90 PDFDocument7 pagesChapter 90 PDFOlalekanKinyomiNo ratings yet
- Lesson 6.4Document10 pagesLesson 6.4Siti Arbaiyah AhmadNo ratings yet
- 7TKK000129 Blackburn Mechanical Connectors Catalogue US DGTDocument52 pages7TKK000129 Blackburn Mechanical Connectors Catalogue US DGTPatricio TobarNo ratings yet
- 02c. Integration of VectorDocument19 pages02c. Integration of VectorYudha AgungNo ratings yet
- Fundamentals of Mechanical Engg. GTU PaperDocument2 pagesFundamentals of Mechanical Engg. GTU PaperArpan PanditNo ratings yet
- Unified Power Quality Conditioner Using Fuzzy ControllerDocument19 pagesUnified Power Quality Conditioner Using Fuzzy ControllersureshNo ratings yet
- SafetyDocument17 pagesSafetyutkarshNo ratings yet
- Dominant WavelengthDocument1 pageDominant WavelengthguangbengNo ratings yet
- Laminar Differential Pressure Flow Measurement - Alicat ScientificDocument3 pagesLaminar Differential Pressure Flow Measurement - Alicat ScientificLisandro IaffarNo ratings yet
- The Exponential FunctionDocument18 pagesThe Exponential FunctionLucas BonifacioNo ratings yet
- Hydrograph AnalysisDocument74 pagesHydrograph AnalysissasaNo ratings yet