You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- System Manual FS Tredess 04 FULLDocument834 pagesSystem Manual FS Tredess 04 FULLpeizanuNo ratings yet
- Avsd Summer2011Document85 pagesAvsd Summer2011dexterNo ratings yet
- DSN VC288Document1 pageDSN VC288peizanu100% (1)
- Windows Command ReferenceDocument42 pagesWindows Command ReferencenetfreeNo ratings yet
- Telefunken Catalogue 2012 - WebDocument32 pagesTelefunken Catalogue 2012 - WebLucian FrandesNo ratings yet
- Edimax Setup 5 in 1Document1 pageEdimax Setup 5 in 1peizanuNo ratings yet
- T71-350 Phase Control ThyristorDocument7 pagesT71-350 Phase Control ThyristorpeizanuNo ratings yet
- L45466 B18 C76 en PDFDocument2 pagesL45466 B18 C76 en PDFpeizanu100% (1)
- Leoni Coaxial Cable 50 Ohm TypeDocument2 pagesLeoni Coaxial Cable 50 Ohm TypepeizanuNo ratings yet
- Winlink™ 1000: Broadband Wireless Transmission SystemDocument174 pagesWinlink™ 1000: Broadband Wireless Transmission SystempeizanuNo ratings yet
- Predictia Intracadru in H.264AVC PDFDocument18 pagesPredictia Intracadru in H.264AVC PDFpeizanuNo ratings yet
- Masuratori in DVB-T PDFDocument8 pagesMasuratori in DVB-T PDFpeizanuNo ratings yet
- Unde Pun Fisierele in Igo-PrimoDocument1 pageUnde Pun Fisierele in Igo-PrimopeizanuNo ratings yet
- DS 7908VoWBRADocument2 pagesDS 7908VoWBRApeizanuNo ratings yet
- HD Plus MRP Rs.453.4 + Rs.81.61 (GST) Rs.535/-Total Channels - 347Document9 pagesHD Plus MRP Rs.453.4 + Rs.81.61 (GST) Rs.535/-Total Channels - 347Raj SinhaNo ratings yet
- TriXX Model Support List 12242013Document12 pagesTriXX Model Support List 12242013gustavo2kNo ratings yet
- Bab 1 Sejarah Perkembangan Teknologi BroadcastingDocument77 pagesBab 1 Sejarah Perkembangan Teknologi Broadcastingfadjrianah21No ratings yet
- DVB StandardsDocument30 pagesDVB Standardsapi-19973617100% (1)
- 65F710 SpecsDocument1 page65F710 SpecsEARLPOKIE100% (2)
- сервис мануал на английском Samsung PN43D450A2DXZA шасси F81A 02 PDFDocument7 pagesсервис мануал на английском Samsung PN43D450A2DXZA шасси F81A 02 PDFMaurílio DiasNo ratings yet
- Philips 32PF7321D LCD TV User ManualDocument40 pagesPhilips 32PF7321D LCD TV User ManualferdialvascribdNo ratings yet
- S 2Document14 pagesS 2Sumit BhatiaNo ratings yet
- LedSync820C User's ManualDocument14 pagesLedSync820C User's ManualJuan Antonio Galvez RozasNo ratings yet
- PagesDocument55 pagesPagesErick Mendez CarrancoNo ratings yet
- LCD TV Presentation SpeechDocument3 pagesLCD TV Presentation SpeechRomin ParekhNo ratings yet
- FT CCTVDocument12 pagesFT CCTVc_632434784No ratings yet
- Technology and Standards of Digital Television Terrestrial Multimedia BroadcastingDocument28 pagesTechnology and Standards of Digital Television Terrestrial Multimedia BroadcastingzerosNo ratings yet
- Sertifikasi STBDocument3 pagesSertifikasi STBregiputra99No ratings yet
- European Direct Broadcasting Satellite Providers ChannelsDocument84 pagesEuropean Direct Broadcasting Satellite Providers ChannelsPcnhs SalNo ratings yet
- Remote Manual - USE 2241 For TV PDFDocument72 pagesRemote Manual - USE 2241 For TV PDFAlbertNo ratings yet
- Emerging Technologies in BroadcastingDocument44 pagesEmerging Technologies in BroadcastingYashank JainNo ratings yet
- VA370M Service ManualDocument25 pagesVA370M Service ManualfepabloNo ratings yet
- DVD 4682Document6 pagesDVD 4682jgrisi065757No ratings yet
- Illuminati Wallpaper (1) .HTMLDocument4 pagesIlluminati Wallpaper (1) .HTMLLuke ZidarichNo ratings yet
- Executive Suites ManualDocument40 pagesExecutive Suites Manualweb_canucksNo ratings yet
- Presentation On Tata SkyDocument18 pagesPresentation On Tata SkyPushkar Agrawal100% (1)
- Satellite CommunicationDocument50 pagesSatellite CommunicationSerj AlcantaraNo ratings yet
- Toshiba Camileo Pro HD ManualDocument194 pagesToshiba Camileo Pro HD ManualFrans van Beers100% (10)
- MPEG-4 HD Single Chip iDTV IC: Emma3TlDocument2 pagesMPEG-4 HD Single Chip iDTV IC: Emma3Tlsontuyet82No ratings yet
- LifeSize Express 220 Datasheet enDocument2 pagesLifeSize Express 220 Datasheet enRedingtonValueNo ratings yet
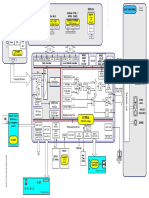
- A/V Switching: Eeprom Sdram CTRL / Mpeg (Smi) Flash MLC Tuner On BoardDocument1 pageA/V Switching: Eeprom Sdram CTRL / Mpeg (Smi) Flash MLC Tuner On BoardcahpmasterNo ratings yet
- EnerLinks III HD Brochure 020 WebDocument4 pagesEnerLinks III HD Brochure 020 WebStanley Ochieng' Ouma100% (1)