You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5796)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (589)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Physics Project Report 2Document15 pagesPhysics Project Report 2Ark Dutta0% (2)
- M2035 3en PDFDocument70 pagesM2035 3en PDFuser0212100% (4)
- Gain Enhancement of Slotted Microstrip Patch Antenna Using EBGDocument5 pagesGain Enhancement of Slotted Microstrip Patch Antenna Using EBGtheijesNo ratings yet
- Manual Ti103Document2 pagesManual Ti103ajaydce05No ratings yet
- Pioneer Gmx-622 2x50w 150wDocument22 pagesPioneer Gmx-622 2x50w 150wrogerionovaesbuenoNo ratings yet
- Datasheet 95160Document48 pagesDatasheet 95160Alexandre Da Silva PintoNo ratings yet
- Report AutoDNA U5YFDocument8 pagesReport AutoDNA U5YFEne Emanuel-StefanNo ratings yet
- Service Manual: HCD-D290/G3300/XB3Document96 pagesService Manual: HCD-D290/G3300/XB3Juan Carlos Tarma CastilloNo ratings yet
- Trends in Audio and Acoustic Signal ProcessingDocument35 pagesTrends in Audio and Acoustic Signal ProcessingAl StringsNo ratings yet
- FulltextThesis 2Document209 pagesFulltextThesis 2Kean PagnaNo ratings yet
- Tl-wn550g - 551g User GuideDocument43 pagesTl-wn550g - 551g User GuideフェリックスオルテガNo ratings yet
- Construction and Calibration of A Thermocouple - Doc ModDocument11 pagesConstruction and Calibration of A Thermocouple - Doc Modnurangetso283150% (2)
- Data Sheet: 74HC/HCT32Document7 pagesData Sheet: 74HC/HCT32hfg554No ratings yet
- An Internship Report On GSM Mobile Netwo PDFDocument45 pagesAn Internship Report On GSM Mobile Netwo PDFsatyaNo ratings yet
- Compal LS-B163P Battery PDFDocument2 pagesCompal LS-B163P Battery PDFRodolfo PinedaNo ratings yet
- COM 122 Introduction To Internent Lecture Note 3Document8 pagesCOM 122 Introduction To Internent Lecture Note 3Elijah OlusegunNo ratings yet
- PS Unit Replacement Procedures JSS296Document10 pagesPS Unit Replacement Procedures JSS296Adi PrasetyoNo ratings yet
- High-Performance Vertical Gate-All-Around Silicon Nanowire FET With High - Kappa Metal GateDocument5 pagesHigh-Performance Vertical Gate-All-Around Silicon Nanowire FET With High - Kappa Metal GateForgot PasswordNo ratings yet
- Admittance Control of A 1-Dof Robotic Arm Actuated by BLDC MotorDocument6 pagesAdmittance Control of A 1-Dof Robotic Arm Actuated by BLDC MotorKaung Soe TharNo ratings yet
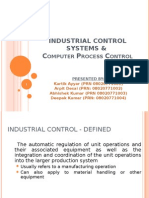
- Industrial Control SystemsDocument52 pagesIndustrial Control SystemsDeepak SharmaNo ratings yet
- ANSI C50.13 Comparision With IEC60034Document4 pagesANSI C50.13 Comparision With IEC60034Jesus Izaguirre100% (2)
- Binary To BCDDocument10 pagesBinary To BCDbobbyn7No ratings yet
- Despre Disq 1.2Document23 pagesDespre Disq 1.2Catalin Cerasel FlaminzeanuNo ratings yet
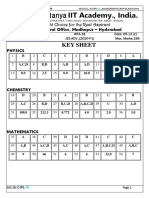
- Sri Chaitanya IIT Academy., India.: KEY SheetDocument7 pagesSri Chaitanya IIT Academy., India.: KEY SheetDivya reddyNo ratings yet
- Question Bank: Ee 1403 - Design of Electrical ApparatusDocument11 pagesQuestion Bank: Ee 1403 - Design of Electrical ApparatussuriyasureshNo ratings yet
- Distance Protection RelayDocument2 pagesDistance Protection RelayThirumalNo ratings yet
- Powercommand Dmc8000: Specification SheetDocument7 pagesPowercommand Dmc8000: Specification SheetthainarimeNo ratings yet
- Veritas Cluster ConceptDocument20 pagesVeritas Cluster Concepthalkasti100% (1)
- GX 600 Manual PDFDocument10 pagesGX 600 Manual PDFKevinNo ratings yet
- Parker Parvex RTS Servo Drive ManualDocument65 pagesParker Parvex RTS Servo Drive ManualJose LopezNo ratings yet