You might also like
- Kinematics of MachinesDocument46 pagesKinematics of Machinessanket patel100% (2)
- Olga Moreira - Applied Mathematics in Engineering-Arcler Press (2023)Document542 pagesOlga Moreira - Applied Mathematics in Engineering-Arcler Press (2023)Blanca Trujillo HiguerasNo ratings yet
- 8051 Microcontroller: An Applications Based IntroductionFrom Everand8051 Microcontroller: An Applications Based IntroductionRating: 5 out of 5 stars5/5 (6)
- 6-Speed MTDocument34 pages6-Speed MTJijo MercyNo ratings yet
- 8-Speed Transmission Maintenance ManualDocument50 pages8-Speed Transmission Maintenance Manuallocario1100% (4)
- CH15 Pert - CPM Project ManagementDocument17 pagesCH15 Pert - CPM Project ManagementPushkar P PokharkarNo ratings yet
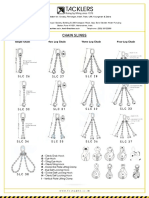
- Chain Chain SlingsDocument8 pagesChain Chain SlingsDharmendra MeenaNo ratings yet
- Unit 5Document12 pagesUnit 5Darshana Jain100% (1)
- Service Parts List: Axle 111/237Document22 pagesService Parts List: Axle 111/237Mihai Popa100% (1)
- WA1200-6 Work Equipment Pins by Fred BoyceDocument23 pagesWA1200-6 Work Equipment Pins by Fred BoyceJason100% (3)
- Robot Arm DesignerDocument16 pagesRobot Arm DesignerEdu PereraNo ratings yet
- 2222222222222222Document9 pages2222222222222222WesamZahranNo ratings yet
- Beam Truss ElementDocument3 pagesBeam Truss ElementjoeNo ratings yet
- MotionGoo Stepper Motor-34HT38S8300 Torque CurveDocument1 pageMotionGoo Stepper Motor-34HT38S8300 Torque CurveMake RownNo ratings yet
- CE 411 - Lecture 5Document14 pagesCE 411 - Lecture 5Israel PopeNo ratings yet
- Cme - Dec 2012Document5 pagesCme - Dec 2012NagarajuRaginaboyinaNo ratings yet
- MotionGoo Stepper Motor-34HT46D4500 Torque CurveDocument1 pageMotionGoo Stepper Motor-34HT46D4500 Torque CurveMake RownNo ratings yet
- MotionGoo Stepper Motor-34HT46D4500C1 Torque CurveDocument1 pageMotionGoo Stepper Motor-34HT46D4500C1 Torque CurveMake RownNo ratings yet
- U# 4 09062010Document1 pageU# 4 09062010Rohit SharmaNo ratings yet
- Using Ostinato V1-0Document16 pagesUsing Ostinato V1-0JOEL RAMIREZNo ratings yet
- TG BG: Reference Calculations OutputDocument2 pagesTG BG: Reference Calculations OutputGirinathNo ratings yet
- Motor SeverDocument19 pagesMotor SeverdineNo ratings yet
- Lab ClassDocument13 pagesLab ClassDepartment Of Computer Science & Engineering PUSTNo ratings yet
- AE832: Introduction To Robotics Lab: Round 2 Experiments Experiment 1: MTAB Mini Robot Subject: Batch 8, MTAB Mini RobotDocument5 pagesAE832: Introduction To Robotics Lab: Round 2 Experiments Experiment 1: MTAB Mini Robot Subject: Batch 8, MTAB Mini RobotPravallika Yadav100% (1)
- EXPERIMENT 5: TDM (Time Division Multiplexing) : Pre-LabDocument4 pagesEXPERIMENT 5: TDM (Time Division Multiplexing) : Pre-LabJaime KipperNo ratings yet
- Drill 4.0 Seven Segment DisplayDocument12 pagesDrill 4.0 Seven Segment DisplayDuaneNo ratings yet
- Datos de Entrada: Unidad CoordenadasDocument49 pagesDatos de Entrada: Unidad CoordenadasGrommash HellscreamNo ratings yet
- 42 - 0718 - 24 - A5 - en - FR - Es - BS LT NAFTA NLO CPDocument24 pages42 - 0718 - 24 - A5 - en - FR - Es - BS LT NAFTA NLO CPBAYARDNo ratings yet
- Training Slides QuickGuideDocument15 pagesTraining Slides QuickGuideWendigoNo ratings yet
- AsriahDocument1 pageAsriahshuyNo ratings yet
- Am1c01470 Si 001Document10 pagesAm1c01470 Si 001Ismael Antonio González RamirezNo ratings yet
- Output Sap2000 Tugas BajaDocument98 pagesOutput Sap2000 Tugas BajaAgus ParwataNo ratings yet
- Understanding IIR (Infinite Impulse Response) Filters - An Intuitive Approach by Dan Lavry, Lavry EngineeringDocument5 pagesUnderstanding IIR (Infinite Impulse Response) Filters - An Intuitive Approach by Dan Lavry, Lavry EngineeringahmedmragabNo ratings yet
- Laboratory Exercise 3: Discrete-Time Signals: Frequency-Domain RepresentationsDocument18 pagesLaboratory Exercise 3: Discrete-Time Signals: Frequency-Domain RepresentationsNguyễn HưngNo ratings yet
- Joints Forces Displacements: NotesDocument6 pagesJoints Forces Displacements: NotesEng Hinji RudgeNo ratings yet
- Design Exercise No. 6: ObjectiveDocument4 pagesDesign Exercise No. 6: ObjectiveHafizNo ratings yet
- 17HS4401 MotionKing PDFDocument1 page17HS4401 MotionKing PDFAlberto Aduvire RafaelNo ratings yet
- Motor Stepper Nema 17Document1 pageMotor Stepper Nema 17LailatulNo ratings yet
- 200110GV WsaDocument9 pages200110GV WsaSUPERVISIÓN GEOMÁTICA GMISANo ratings yet
- TrussDocument6 pagesTrussSsm ConsultantsNo ratings yet
- Joints Forces Displacements: NotesDocument6 pagesJoints Forces Displacements: NotesPedelyn ArcenasNo ratings yet
- Joints Forces Displacements: NotesDocument6 pagesJoints Forces Displacements: Notesherbert palacioNo ratings yet
- TrussDocument6 pagesTrussAnonymous SLwhgmcNo ratings yet
- TrussDocument6 pagesTrussMelano ArjayNo ratings yet
- Joints Forces Displacements: NotesDocument6 pagesJoints Forces Displacements: NotesGravity SuperNo ratings yet
- Joints Forces Displacements: NotesDocument6 pagesJoints Forces Displacements: NotesManash ChoudhuryNo ratings yet
- TrussDocument6 pagesTrussNiranjan SNo ratings yet
- TrussDocument6 pagesTrussSsm ConsultantsNo ratings yet
- Joints Forces Displacements: NotesDocument6 pagesJoints Forces Displacements: NotesGravity SuperNo ratings yet
- Akbar Aulia Rachman UTS Sistem TertanamDocument6 pagesAkbar Aulia Rachman UTS Sistem TertanamAkbar aNo ratings yet
- Customer PO Reference: EPC-PO-32021/10P149 Customer Name: M/S Va Tech Wabag., A/C MRPL Package Name: 690V PMCC VFD Panel Page 1 of 3Document3 pagesCustomer PO Reference: EPC-PO-32021/10P149 Customer Name: M/S Va Tech Wabag., A/C MRPL Package Name: 690V PMCC VFD Panel Page 1 of 3sureshbabum85No ratings yet
- Abb Digital Dido, Dx581-S - Data - SheetDocument13 pagesAbb Digital Dido, Dx581-S - Data - SheetvinodNo ratings yet
- 06-04-2024_Sr.Super60(Incoming)_NUCLEUS & STERLING BT_Jee-Main_CTM-11&CTM-23(QMT-06)_Key & Sol'sDocument20 pages06-04-2024_Sr.Super60(Incoming)_NUCLEUS & STERLING BT_Jee-Main_CTM-11&CTM-23(QMT-06)_Key & Sol'skommidi.srijanreddyNo ratings yet
- Design of Ledger TubeDocument17 pagesDesign of Ledger TubeAbdul HameedNo ratings yet
- Lab 2: Nodal Analysis and Mesh Analysis Techniques: V V I V Ia V V I V Ib V I V V IDocument5 pagesLab 2: Nodal Analysis and Mesh Analysis Techniques: V V I V Ia V V I V Ib V I V V Igurdian skyNo ratings yet
- Image Guided Spine Surgery O-Arm, Navigation, RoboticsDocument92 pagesImage Guided Spine Surgery O-Arm, Navigation, RoboticsBulgariu AndreiNo ratings yet
- AC 0 BC 25 Max - Ve 0 Max +ve 1: Fraction 0 Span 25Document5 pagesAC 0 BC 25 Max - Ve 0 Max +ve 1: Fraction 0 Span 25rakesh yadavNo ratings yet
- NRichards DCASS 2015Document36 pagesNRichards DCASS 2015الحمد للهNo ratings yet
- Me 8 Sem Automation in Productiion Summer 2018Document4 pagesMe 8 Sem Automation in Productiion Summer 2018Zaky MalikNo ratings yet
- Current Code Changes For 2025Document21 pagesCurrent Code Changes For 2025albaradagarciaNo ratings yet
- Experiment 1Document6 pagesExperiment 1noumanNo ratings yet
- DWG No Item No Section Width Length Wt/Mark Assly Mark No'S/ Mark Unit Weight No's of Marks Total WTDocument5 pagesDWG No Item No Section Width Length Wt/Mark Assly Mark No'S/ Mark Unit Weight No's of Marks Total WTkushaljp8989No ratings yet
- Octave IntroDocument17 pagesOctave IntroavaeacNo ratings yet
- Transistor Electronics: Use of Semiconductor Components in Switching OperationsFrom EverandTransistor Electronics: Use of Semiconductor Components in Switching OperationsRating: 1 out of 5 stars1/5 (1)
- Government Publications: Key PapersFrom EverandGovernment Publications: Key PapersBernard M. FryNo ratings yet
- Theory of Machines: Mechanical EngineeringDocument10 pagesTheory of Machines: Mechanical EngineeringShamsuzNo ratings yet
- Kinematics in One Dimension: PurposeDocument8 pagesKinematics in One Dimension: PurposeDeep PrajapatiNo ratings yet
- Review Sheet For Newton's Laws Test 15Document3 pagesReview Sheet For Newton's Laws Test 15api-237866679No ratings yet
- Final Yousif Al Mashhadany ThesisDocument166 pagesFinal Yousif Al Mashhadany Thesisyousif al mashhadanyNo ratings yet
- MECH2020 Notes 7 For StudentsDocument18 pagesMECH2020 Notes 7 For StudentsAudrey CheungNo ratings yet
- Details of GearsDocument88 pagesDetails of Gearsramchandra rao deshpandeNo ratings yet
- Passivity-Based Motion and Force Tracking Control For Constrained Elastic Joint RobotsDocument6 pagesPassivity-Based Motion and Force Tracking Control For Constrained Elastic Joint RobotsThanh Hai NguyenNo ratings yet
- Engineering Mechanics - An Introduction To Dynamics 4th Ed PDF - PDF - Kinematics - VelocityDocument502 pagesEngineering Mechanics - An Introduction To Dynamics 4th Ed PDF - PDF - Kinematics - VelocitySRNo ratings yet
- CIA 3 Assignment 4 Unit 2 PDFDocument8 pagesCIA 3 Assignment 4 Unit 2 PDFSahebzaadSinghBehniwalNo ratings yet
- Engranajes EjerciciosDocument12 pagesEngranajes EjerciciosRonys VillalobosNo ratings yet
- Kinematics of MachinesDocument2 pagesKinematics of Machinessameer_m_daniNo ratings yet
- Velocity Time Graphs WorksheetDocument4 pagesVelocity Time Graphs WorksheetMostafaNo ratings yet
- Types of Simple MachinesDocument37 pagesTypes of Simple MachinesAd Man GeTigNo ratings yet
- Kinematics of Machinery Anna University Question Papers CompiledDocument77 pagesKinematics of Machinery Anna University Question Papers CompiledNatesha SundharanNo ratings yet
- Topic 3 Gears and ShaftsDocument27 pagesTopic 3 Gears and ShaftsSaiful AnuarNo ratings yet
- Module 3 - Plane MotionDocument54 pagesModule 3 - Plane MotionNirav MachhiNo ratings yet
- Chapter 2 Assignment For IitjeeDocument25 pagesChapter 2 Assignment For IitjeeShashank ShekharNo ratings yet
- A Dual Quaternion Solution To The Forward Kinematics of A Class of Sic Dof Parallel RobotsDocument10 pagesA Dual Quaternion Solution To The Forward Kinematics of A Class of Sic Dof Parallel RobotsGerardo HernándezNo ratings yet
- Motion Test Paper Classs 9thDocument4 pagesMotion Test Paper Classs 9thNitin Kumar0% (1)
- Newtons Third Law of MotionDocument5 pagesNewtons Third Law of MotionWong Wei HanNo ratings yet
- 6dof DynamicsDocument13 pages6dof DynamicsAlaa AlsotariNo ratings yet
- B TECH Civil 2018 Syllabus II Yr To IV Yr 30-10-2019Document159 pagesB TECH Civil 2018 Syllabus II Yr To IV Yr 30-10-2019Tushar AnandNo ratings yet
- National Institute of Technology-MizoramDocument6 pagesNational Institute of Technology-MizoramLITTLE RIDERSNo ratings yet
- MomentsDocument4 pagesMomentsontlametse tidimaneNo ratings yet
- InTech Robotic ExcavationDocument32 pagesInTech Robotic Excavationmohan_manoj43No ratings yet