
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- L s3 Low Voltage Underground CableDocument20 pagesL s3 Low Voltage Underground CableAsith Savinda100% (4)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Ecu (Electronic Control Unit) (E28, E32) : 1) 2002 MODELDocument12 pagesEcu (Electronic Control Unit) (E28, E32) : 1) 2002 MODEL08088338100% (1)
- Is500 PDFDocument298 pagesIs500 PDFShekhar Srivass50% (4)
- Person Coil NDocument5 pagesPerson Coil NAsith SavindaNo ratings yet
- Chopper ControlledDocument6 pagesChopper ControlledAsith SavindaNo ratings yet
- MN 4001. Assignment 02 NDocument8 pagesMN 4001. Assignment 02 NAsith SavindaNo ratings yet
- Study On Current Transformers: TabulationDocument6 pagesStudy On Current Transformers: TabulationAsith SavindaNo ratings yet
- MN 4001. Assignment 02 NDocument8 pagesMN 4001. Assignment 02 NAsith SavindaNo ratings yet
- Stepper MotorDocument6 pagesStepper MotorAsith Savinda100% (1)
- Understanding Power FactorDocument5 pagesUnderstanding Power FactorromeshmoreyNo ratings yet
- Lab Report: Amplitude ModulationDocument6 pagesLab Report: Amplitude ModulationAsith SavindaNo ratings yet
- HM 4001. Assignment 03Document5 pagesHM 4001. Assignment 03Asith SavindaNo ratings yet
- Sunderland App PDFDocument6 pagesSunderland App PDFAsith SavindaNo ratings yet
- Simulation Study of A Three Phase Transmission LineDocument21 pagesSimulation Study of A Three Phase Transmission LineAsith SavindaNo ratings yet
- Proximity Sensors ExplainedDocument9 pagesProximity Sensors ExplainedAsith SavindaNo ratings yet
- ElectropeneumaticsDocument164 pagesElectropeneumaticstharindu100% (1)
- Reducing Power Factor CostDocument4 pagesReducing Power Factor CostCatherine JamesNo ratings yet
- My - Dsheet - gwj111 E1 03 42531Document18 pagesMy - Dsheet - gwj111 E1 03 42531Nguyễn TrươngNo ratings yet
- AEG Mini Contactors Starters Power RelaysDocument8 pagesAEG Mini Contactors Starters Power RelaysAsith SavindaNo ratings yet
- Topic21-Proximity Switches SVDocument31 pagesTopic21-Proximity Switches SVTuan DoNo ratings yet
- Sensors PDFDocument192 pagesSensors PDFAsith SavindaNo ratings yet
- Sensors PDFDocument192 pagesSensors PDFAsith SavindaNo ratings yet
- Compressed Air EngineeringDocument118 pagesCompressed Air EngineeringAsith SavindaNo ratings yet
- IEC - Panel RegulationDocument20 pagesIEC - Panel RegulationAsith SavindaNo ratings yet
- Cable Laying SpecificationDocument16 pagesCable Laying SpecificationdavidgarciavazquezNo ratings yet
- Single Phase TransformerDocument10 pagesSingle Phase Transformerঅন্বেষা সেনগুপ্তNo ratings yet
- Lab Report: Amplitude ModulationDocument6 pagesLab Report: Amplitude ModulationAsith SavindaNo ratings yet
- Comm Asst 01Document5 pagesComm Asst 01Asith SavindaNo ratings yet
- University of Moratuwa University Admissions - Academic Year 2010/2011Document3 pagesUniversity of Moratuwa University Admissions - Academic Year 2010/2011Nintha JalanNo ratings yet
- IEC - Panel RegulationDocument20 pagesIEC - Panel RegulationAsith SavindaNo ratings yet
- AcadfeuiDocument40 pagesAcadfeuiShan Al BisriNo ratings yet
- ZCP 515-33KV Twin FDRDocument21 pagesZCP 515-33KV Twin FDRVeera ChaitanyaNo ratings yet
- Design of Ultra Low Noise AmplifiersDocument7 pagesDesign of Ultra Low Noise AmplifiersΜαρια ΡοδακοπουλουNo ratings yet
- Abb Combiflex IdentificationDocument8 pagesAbb Combiflex IdentificationRamesh Kannan0% (1)
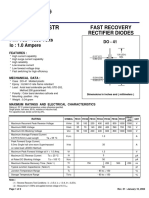
- FR101 - FR107-STR: PRV: 50 - 1000 Volts Io: 1.0 AmpereDocument2 pagesFR101 - FR107-STR: PRV: 50 - 1000 Volts Io: 1.0 AmpereLupita Motta TobíasNo ratings yet
- Power Redundancy in The Data Center - Course PreviewDocument5 pagesPower Redundancy in The Data Center - Course PreviewscribdjbarrosNo ratings yet
- IET Power Electronics Volume 4 Issue 9 2011 [Doi 10.1049_iet-Pel.2010.0363] Jung, J.-h.; Ahmed, S. -- Flyback Converter With Novel Active Clamp Control and Secondary Side Post Regulator for Low Standby Power Consumption Under HighDocument10 pagesIET Power Electronics Volume 4 Issue 9 2011 [Doi 10.1049_iet-Pel.2010.0363] Jung, J.-h.; Ahmed, S. -- Flyback Converter With Novel Active Clamp Control and Secondary Side Post Regulator for Low Standby Power Consumption Under HighTuấn Anh PhạmNo ratings yet
- ABB Single Pole Mounted Disconnector (NPS)Document28 pagesABB Single Pole Mounted Disconnector (NPS)Suresh100% (1)
- MercotacDocument7 pagesMercotacFERMIN ALFARO GARCIANo ratings yet
- Instruction Sheet Is Nn8309 - Style Number Nn8309Wt, Nn8311WtDocument3 pagesInstruction Sheet Is Nn8309 - Style Number Nn8309Wt, Nn8311Wtdayshift5No ratings yet
- ITT American Electric Scroll & Style Line Post Top Series 245 & 246 Spec Sheet 3-81Document8 pagesITT American Electric Scroll & Style Line Post Top Series 245 & 246 Spec Sheet 3-81Alan MastersNo ratings yet
- Instrumentation Earthing SystemDocument5 pagesInstrumentation Earthing SystempramudioanNo ratings yet
- 236D Skid Steer Loader MPW00810Document4 pages236D Skid Steer Loader MPW00810Diego zapata100% (1)
- Simplified CMOS Voltage Transfer Curve Step 1. Finding V: M M IN MDocument6 pagesSimplified CMOS Voltage Transfer Curve Step 1. Finding V: M M IN Mabhishekmath123No ratings yet
- Mechanical Specification for Addressable Wall SounderDocument2 pagesMechanical Specification for Addressable Wall SounderAnonymous YWmB9HDgNo ratings yet
- MR TapChangerDocument76 pagesMR TapChangervertextsc100% (1)
- Monitoring Technique: Varimeter Current Relay BA 9053 Translation of The Original InstructionsDocument8 pagesMonitoring Technique: Varimeter Current Relay BA 9053 Translation of The Original InstructionsShiaTVfanNo ratings yet
- As 4307.1-1995 Rotating Electrical Machines - Repair and Overhaul Low Voltage MachinesDocument8 pagesAs 4307.1-1995 Rotating Electrical Machines - Repair and Overhaul Low Voltage MachinesSAI Global - APACNo ratings yet
- Nov Dec 2022Document2 pagesNov Dec 2022pecoxor808No ratings yet
- Row Part of Designation Reference Material Description ManufacturerDocument1 pageRow Part of Designation Reference Material Description ManufacturerEdwinGomezNo ratings yet
- LT Panel Pre-Commissioning TestsDocument42 pagesLT Panel Pre-Commissioning TestsDhivagar Namakkal100% (1)
- Price List Effective From 1/09/08Document28 pagesPrice List Effective From 1/09/08bhupi dagarNo ratings yet
- ALIMAK SCANDO 450 DOL 32ext. 50Hz 1278 EN Oct 2020Document1 pageALIMAK SCANDO 450 DOL 32ext. 50Hz 1278 EN Oct 2020Boruida MachineryNo ratings yet
- Techson Brochure SEP NEWDocument15 pagesTechson Brochure SEP NEWKamal SharmaNo ratings yet
- HamIV Rotor ModificationDocument2 pagesHamIV Rotor Modificationmiguel tNo ratings yet
- EE9AL EE5D Celestial Mendoza PDF File 2Document3 pagesEE9AL EE5D Celestial Mendoza PDF File 2jenixson tamondongNo ratings yet
- D Sars 0017924Document7 pagesD Sars 0017924Richardo JuarezNo ratings yet
- Power Electronic DevicesDocument21 pagesPower Electronic Deviceskupakwashe KuzowomunhuNo ratings yet
- A Dutch Journey in JLH-land: A Tribute To The JLH 10-15 Watt Class-A AmplifierDocument4 pagesA Dutch Journey in JLH-land: A Tribute To The JLH 10-15 Watt Class-A AmplifierDaniel ScardiniNo ratings yet









































































![IET Power Electronics Volume 4 Issue 9 2011 [Doi 10.1049_iet-Pel.2010.0363] Jung, J.-h.; Ahmed, S. -- Flyback Converter With Novel Active Clamp Control and Secondary Side Post Regulator for Low Standby Power Consumption Under High](https://imgv2-2-f.scribdassets.com/img/document/220209509/149x198/8baf096670/1429428106?v=1)





















