You might also like
- SS BLT 300manualDocument18 pagesSS BLT 300manualYogesh KhollamNo ratings yet
- Micro Servo RobotDocument40 pagesMicro Servo Robotlokesh mahor0% (1)
- Sensorless PMSM Vector Control With A SM Observer USING MC56F8013Document110 pagesSensorless PMSM Vector Control With A SM Observer USING MC56F8013Chiheb Ben RegayaNo ratings yet
- Stepper Motor Control Using The PIC16F684Document12 pagesStepper Motor Control Using The PIC16F684edward_conzaNo ratings yet
- Guide Crystal Tester Frequency Counter enDocument5 pagesGuide Crystal Tester Frequency Counter enSetiawan AR100% (1)
- STATIC SYNCHRONOUS SERIES COMPENSATOR (SSSC) - Power Quality in Electrical Systems PDFDocument3 pagesSTATIC SYNCHRONOUS SERIES COMPENSATOR (SSSC) - Power Quality in Electrical Systems PDFBhushan MankarNo ratings yet
- Modified Sine Wave UPS Report (UET, Lahore)Document43 pagesModified Sine Wave UPS Report (UET, Lahore)Ahsan Mubashir0% (2)
- Flasher 5: Programming Tool For Serial in Circuit Programming of Microcontrollers With On-Chip FlashDocument16 pagesFlasher 5: Programming Tool For Serial in Circuit Programming of Microcontrollers With On-Chip FlashAjay AroraNo ratings yet
- ZVS Full BridgeDocument20 pagesZVS Full Bridgejameschall1No ratings yet
- Handouts PDFDocument97 pagesHandouts PDFAnonymous GEHYDGYVdNo ratings yet
- Embeded PU ComputerDocument188 pagesEmbeded PU ComputerLoknath RegmiNo ratings yet
- Capacitor Power Supply Design NoteDocument8 pagesCapacitor Power Supply Design NoteIvez StrausseNo ratings yet
- Szza 058 ADocument39 pagesSzza 058 AFatality GearNo ratings yet
- ¡ Digital Control in Power Electronics¡ by Simone Buso and Paolo MattavelliDocument159 pages¡ Digital Control in Power Electronics¡ by Simone Buso and Paolo MattavellidevchandarNo ratings yet
- Smart Grids Section Course Outline-1Document3 pagesSmart Grids Section Course Outline-1Ab CNo ratings yet
- CUPS Printing in Linux UNIX For Intermec Printers Tech BriefDocument4 pagesCUPS Printing in Linux UNIX For Intermec Printers Tech Briefj2448910No ratings yet
- Coherent Wireless Power Charging and Data Transfer for Electric VehiclesFrom EverandCoherent Wireless Power Charging and Data Transfer for Electric VehiclesNo ratings yet
- MemristorDocument18 pagesMemristorNaveed BashirNo ratings yet
- UC3845 Technical ExplanationDocument15 pagesUC3845 Technical ExplanationankurmalviyaNo ratings yet
- Neural Networks DocumentationDocument406 pagesNeural Networks DocumentationManh Lam LeNo ratings yet
- Maby SSEC b00k PDFDocument922 pagesMaby SSEC b00k PDFFatima Sowar EldahabNo ratings yet
- PROJECT PROPOPSAL REPORT Final EditDocument31 pagesPROJECT PROPOPSAL REPORT Final EditMUBANGIZI FELEXNo ratings yet
- SpaceVector PWM InverterDocument35 pagesSpaceVector PWM Invertersolomong50% (2)
- Master Thesis - Observer Based Fault Detection in DC-DC Power Converter - Levin - KieranDocument97 pagesMaster Thesis - Observer Based Fault Detection in DC-DC Power Converter - Levin - KieranhieuhuechNo ratings yet
- Grid Tie Inverter Schematic and Principals of OperationDocument6 pagesGrid Tie Inverter Schematic and Principals of Operation31482No ratings yet
- Devices, Circuits, and Applications: Fourth EditionDocument34 pagesDevices, Circuits, and Applications: Fourth EditionAtiq Ur RehmanNo ratings yet
- Manual Axpert KING PYLONDocument59 pagesManual Axpert KING PYLONEllis BergmanNo ratings yet
- Sinewave UPS Circuit Using PIC16F72Document21 pagesSinewave UPS Circuit Using PIC16F72Dylan LopezNo ratings yet
- Node Vol 01Document152 pagesNode Vol 01Guilherme JungNo ratings yet
- F3-DP-2015-Hlinovsky-Tomas-Optimal Control of Mathematical Model of The ElectrovehicleDocument85 pagesF3-DP-2015-Hlinovsky-Tomas-Optimal Control of Mathematical Model of The ElectrovehiclecristiNo ratings yet
- Texas Instruments. Testing A Form of SMPSDocument7 pagesTexas Instruments. Testing A Form of SMPSRoger FairchildNo ratings yet
- Analysis EMI of A PFC On The Band Pass 150kHz30MHzDocument6 pagesAnalysis EMI of A PFC On The Band Pass 150kHz30MHzStephane Brehaut PhD Ceng SMIEEENo ratings yet
- MikroC PRO200Document427 pagesMikroC PRO200Ivan LemoineNo ratings yet
- 5W USB Flyback Design ReviewApplication ReportDocument21 pages5W USB Flyback Design ReviewApplication ReportleechulmiuNo ratings yet
- Operating A DC Electric Arc Furnace On A Weak Grid Challenges and SolutionsDocument6 pagesOperating A DC Electric Arc Furnace On A Weak Grid Challenges and SolutionsAmmarGhazaliNo ratings yet
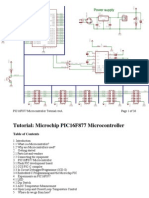
- PIC16F877 Microcontroller TutorialDocument37 pagesPIC16F877 Microcontroller Tutorialmc_prayer100% (4)
- Microchip MPLAB® X IDE User's GuideDocument226 pagesMicrochip MPLAB® X IDE User's GuideStuart CouttsNo ratings yet
- Bio MEMSDocument16 pagesBio MEMStronghuynh12No ratings yet
- Buck ConvertersDocument15 pagesBuck Convertersmuddassir07100% (2)
- Generating 50Hz PWM Using PIC16F877ADocument2 pagesGenerating 50Hz PWM Using PIC16F877AZarko DacevicNo ratings yet
- Lukas PIC TutorialDocument16 pagesLukas PIC Tutorialg@vo100% (3)
- Wireless Fidelity: Technology and ApplicationsDocument22 pagesWireless Fidelity: Technology and ApplicationsPurboday GhoshNo ratings yet
- Power ElectronicsDocument86 pagesPower ElectronicsMuhammad Ali Johar100% (1)
- 1.5kva DC To Ac Power InverterDocument14 pages1.5kva DC To Ac Power InverterOnime Terryjane JeremiahNo ratings yet
- Project ReportDocument8 pagesProject Reportسید کاظمی100% (1)
- The 8051 Micro Controller and Embedded Systems CH1Document12 pagesThe 8051 Micro Controller and Embedded Systems CH1gurudevmaneNo ratings yet
- Cellular Technologies for Emerging Markets: 2G, 3G and BeyondFrom EverandCellular Technologies for Emerging Markets: 2G, 3G and BeyondNo ratings yet
- Grid Converters for Photovoltaic and Wind Power SystemsFrom EverandGrid Converters for Photovoltaic and Wind Power SystemsRating: 4.5 out of 5 stars4.5/5 (4)
- Buck ConverterDocument52 pagesBuck Convertermayankrkl50% (2)
- Soft Switching DC DC ConvertersDocument114 pagesSoft Switching DC DC ConvertersRAJESHNo ratings yet
- Sine Wave Inverter With PICDocument50 pagesSine Wave Inverter With PICmtrapkNo ratings yet
- Simulation and Prototype Implementation of Phase Shift Full Bridge DC DC ConverterDocument4 pagesSimulation and Prototype Implementation of Phase Shift Full Bridge DC DC ConverterjimmyNo ratings yet
- High-Efficiency Active-Clamp Forward Converter With Transient Current Build-Up (TCB) ZVS TechniqueDocument9 pagesHigh-Efficiency Active-Clamp Forward Converter With Transient Current Build-Up (TCB) ZVS TechniquekerblaNo ratings yet
- Lab Innovation Project DC DCDocument15 pagesLab Innovation Project DC DCAyush MittalNo ratings yet
- Article 50 Ijaet Volii Issue IV Oct Dec 2011Document6 pagesArticle 50 Ijaet Volii Issue IV Oct Dec 2011Pradyumna PooskuruNo ratings yet
- High Efficient Asynchronous Buck Converter For Biomedical DevicesDocument7 pagesHigh Efficient Asynchronous Buck Converter For Biomedical DevicesresearchinventyNo ratings yet
- NCL ReportDocument20 pagesNCL ReportSwati Tripathi33% (3)
- Electronics II - Spring-12 (Junaid Ahmed)Document3 pagesElectronics II - Spring-12 (Junaid Ahmed)ALi AKber MusTafaNo ratings yet
- Electrical Engineering 2015 AdmissionDocument38 pagesElectrical Engineering 2015 AdmissionalokNo ratings yet
- Zusc D 15 00214R1Document11 pagesZusc D 15 00214R1shNo ratings yet
- Double Gate MosfetDocument23 pagesDouble Gate MosfetSoumyabrata DeNo ratings yet
- Ijest12 04 05 285Document7 pagesIjest12 04 05 285Vijay Kumar PulluriNo ratings yet
- Ec6304-Electronic Circuits - I Iii Semester Ece Two Marks Questions and Answers EC6304 - Electronic Circuits - IDocument33 pagesEc6304-Electronic Circuits - I Iii Semester Ece Two Marks Questions and Answers EC6304 - Electronic Circuits - IgayathriNo ratings yet
- Revised Project Report FormatDocument47 pagesRevised Project Report FormattamiratNo ratings yet
- 100 IC CircuitsDocument34 pages100 IC CircuitselektrorwbNo ratings yet
- MOS TransistorDocument21 pagesMOS TransistorAbhishek Singh100% (1)
- Datasheet PDFDocument2 pagesDatasheet PDFJosemiguel TavarezNo ratings yet
- MSRIT ECESyllabusDocument37 pagesMSRIT ECESyllabusraghunathbh74No ratings yet
- S1p2655a03-33 SamsungDocument10 pagesS1p2655a03-33 SamsungArturo NavaNo ratings yet
- Power Electronics Laboratory User Manual: Department of Electronics and Communication EngineeringDocument55 pagesPower Electronics Laboratory User Manual: Department of Electronics and Communication EngineeringMadan R HonnalagereNo ratings yet
- Vtu Lab Manuals VlsiDocument79 pagesVtu Lab Manuals VlsisrikanthuasNo ratings yet
- Charge Couple DevicesDocument13 pagesCharge Couple DevicesSourodeep BasuNo ratings yet
- RF Manual 12ThDocument97 pagesRF Manual 12ThmilhosoNo ratings yet
- Konstantin D. Stefanov Thesis: Radiation Damage Effects in CCD Sensors For Tracking Applications in High Energy PhysicsDocument110 pagesKonstantin D. Stefanov Thesis: Radiation Damage Effects in CCD Sensors For Tracking Applications in High Energy PhysicsSalah Eddine BekhoucheNo ratings yet
- Fossum J.G., Trivedi V.P. - Fundamentals of Ultra-Thin-Body MOSFETs and FinFETs-Cambridge University Press (2013) PDFDocument228 pagesFossum J.G., Trivedi V.P. - Fundamentals of Ultra-Thin-Body MOSFETs and FinFETs-Cambridge University Press (2013) PDFNelson José Rodríguez Sierra100% (1)
- Performance and Characteristic Analysis of Double Gate Mosfet Over Single Gate MosfetDocument4 pagesPerformance and Characteristic Analysis of Double Gate Mosfet Over Single Gate Mosfetranvir singhNo ratings yet
- Embedded System Lecture Notes by Prof. Dr. Surendra Shrestha SirDocument698 pagesEmbedded System Lecture Notes by Prof. Dr. Surendra Shrestha SirAakura Pyakura50% (2)
- SHFHFGDDocument58 pagesSHFHFGDSwagat PradhanNo ratings yet
- Automotive Catalog Ver.2.1 (En)Document88 pagesAutomotive Catalog Ver.2.1 (En)AnugrahNo ratings yet
- Hspice 2005Document173 pagesHspice 2005何明俞No ratings yet
- Report DecoderDocument84 pagesReport DecoderUmaizAhmedNo ratings yet
- STR A6252 PDFDocument9 pagesSTR A6252 PDFFernando ChingaNo ratings yet
- Design and Hardware Implementation of L Type Resonant Step Down DC DC Converter Using Zero Current Switching Technique IJERTV5IS050623 PDFDocument8 pagesDesign and Hardware Implementation of L Type Resonant Step Down DC DC Converter Using Zero Current Switching Technique IJERTV5IS050623 PDFMouli ReddyNo ratings yet
- DimosDocument3 pagesDimosSanthosh Kumar ChittipoluNo ratings yet
- FQPF 8 N 60 CFDocument8 pagesFQPF 8 N 60 CFBhadreshkumar SharmaNo ratings yet
- EDC - Lecture PlanDocument4 pagesEDC - Lecture PlanMahendra BabuNo ratings yet
- CETa CompsDocument9 pagesCETa CompsDelta VisionNo ratings yet