You might also like
- Virtual Reality with VRTK4: Create Immersive VR Experiences Leveraging Unity3D and Virtual Reality ToolkitFrom EverandVirtual Reality with VRTK4: Create Immersive VR Experiences Leveraging Unity3D and Virtual Reality ToolkitNo ratings yet
- Virtual Reality1Document72 pagesVirtual Reality1vinni vone100% (4)
- Reality Reinvented: Name XYZ Roll No. 2307001 Semester 5 Department ECEDocument37 pagesReality Reinvented: Name XYZ Roll No. 2307001 Semester 5 Department ECESachin KadyanNo ratings yet
- Virtual RealityDocument19 pagesVirtual RealityJimesh Gajera88% (8)
- Yanmar SMSV15 - SV17Document356 pagesYanmar SMSV15 - SV17kokosik22100% (3)
- Pipe JackingDocument30 pagesPipe JackingMESUT100% (4)
- Extened RealityDocument21 pagesExtened RealityVaibhav BhingradiyaNo ratings yet
- Check List For Installation of Cooling TowersDocument2 pagesCheck List For Installation of Cooling TowersGirithar M Sundaram67% (3)
- Immersive Technologies In Healthcare: Virtual Reality And Augmented RealityFrom EverandImmersive Technologies In Healthcare: Virtual Reality And Augmented RealityNo ratings yet
- What Is Virtual Reality?Document40 pagesWhat Is Virtual Reality?Aftab PopatiaNo ratings yet
- Virtual RealityDocument26 pagesVirtual RealitySanjukta DasNo ratings yet
- The History and Applications of Virtual RealityDocument27 pagesThe History and Applications of Virtual RealityPREM SAI POLAPALANo ratings yet
- 1584 e cr393 en Voith-Turbo-H-L-HydraulicDocument24 pages1584 e cr393 en Voith-Turbo-H-L-Hydraulicavi_ca22No ratings yet
- TM 9-2320-420-10 M983a2let Part 7Document157 pagesTM 9-2320-420-10 M983a2let Part 7AdvocateNo ratings yet
- Pressurisation and Depressurization ResultsDocument8 pagesPressurisation and Depressurization ResultsQayyum KhanNo ratings yet
- MODULE 07 Virtual RealityDocument80 pagesMODULE 07 Virtual RealitySkylarNo ratings yet
- MODULE 07 Virtual Reality V1Document19 pagesMODULE 07 Virtual Reality V1Skylar0% (1)
- Oculus VR A Virtual Reality Seminar ReportDocument44 pagesOculus VR A Virtual Reality Seminar ReportTaani Bohra89% (18)
- Virtual RealityDocument33 pagesVirtual RealityRini SamuelNo ratings yet
- Virtual Reality ReportDocument20 pagesVirtual Reality Reportsaqib_sweet67% (9)
- Elec Virtual RealityDocument20 pagesElec Virtual RealityManoj TananNo ratings yet
- MODULE 07 Virtual RealityDocument204 pagesMODULE 07 Virtual RealitySkylarNo ratings yet
- Xbox 360 SystemDocument26 pagesXbox 360 SystemAbhijeetKushwaha50% (2)
- Lecture Notes Unit 1Document56 pagesLecture Notes Unit 1ayush sharmaNo ratings yet
- Virtual Reality ReportDocument16 pagesVirtual Reality Reportmanu6792No ratings yet
- VR History and ImpactDocument13 pagesVR History and ImpactGianiNo ratings yet
- A Survey On Game Development in Virtual RealityDocument2 pagesA Survey On Game Development in Virtual RealityInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Reality Reinvented: Name Shipra Grover Roll No. 2307001 Semester 5 Department CseDocument37 pagesReality Reinvented: Name Shipra Grover Roll No. 2307001 Semester 5 Department CseShipra GroverNo ratings yet
- Ocps Final Group ReportDocument10 pagesOcps Final Group ReportJawad NadeemNo ratings yet
- Virtual Reality (VR) Introduction and HistoryDocument13 pagesVirtual Reality (VR) Introduction and HistoryAshish SehrawatNo ratings yet
- Virtual RealityDocument71 pagesVirtual RealityKlein TorrNo ratings yet
- Hci Research Labitad OrpillaDocument6 pagesHci Research Labitad OrpillaAllen joshua LabitadNo ratings yet
- Virtual Reality: Naigvid Cabrera 4to InformáticaDocument13 pagesVirtual Reality: Naigvid Cabrera 4to InformáticaDainer GuerreroNo ratings yet
- Virtual Reality IntroductionDocument5 pagesVirtual Reality IntroductionQuang TranNo ratings yet
- Evolution of Virtual RealityDocument4 pagesEvolution of Virtual RealityJosé RamosNo ratings yet
- Virtual RealityDocument157 pagesVirtual RealitykailasamraviNo ratings yet
- Virtual Reality: A Powerful New Technology: 1. What Is VR?Document9 pagesVirtual Reality: A Powerful New Technology: 1. What Is VR?Map NaNo ratings yet
- Virtual Reality 360 Explained: Getting To Know Your Iv From Your TRDocument9 pagesVirtual Reality 360 Explained: Getting To Know Your Iv From Your TRJiniNo ratings yet
- Synopsis On Virtual Reality: Submitted By: Gurjeet Singh Mca 3 SEM-051Document7 pagesSynopsis On Virtual Reality: Submitted By: Gurjeet Singh Mca 3 SEM-051Sonu PuriNo ratings yet
- The History of Virtual RealityDocument3 pagesThe History of Virtual RealityAHMAD FADIATUDDIN MAT TAHIRNo ratings yet
- What Is Virtual RealityDocument17 pagesWhat Is Virtual RealityZamzam KhanNo ratings yet
- Virtual Reality History, Application and FutureDocument6 pagesVirtual Reality History, Application and FutureIJRASETPublicationsNo ratings yet
- School of Computer Science & Engineering: Introduction To Augmented Reality and Virtual Reality (AR & VR)Document65 pagesSchool of Computer Science & Engineering: Introduction To Augmented Reality and Virtual Reality (AR & VR)Pooja Singh RathoreNo ratings yet
- What SVRDocument27 pagesWhat SVRaerhaeh100% (1)
- Virtual Reality Technology and its FutureDocument11 pagesVirtual Reality Technology and its FutureEsha ShahNo ratings yet
- Barkhamanralseminaronaugmented Reality 141121125650 Conversion Gate01Document35 pagesBarkhamanralseminaronaugmented Reality 141121125650 Conversion Gate01Frustrated engineer100% (1)
- Seminar On: Presented By:: Extended RealityDocument23 pagesSeminar On: Presented By:: Extended RealityVaibhav BhingradiyaNo ratings yet
- Seminar Report: Parth Sarthi Sharma - 07010102815 - ECE1Document15 pagesSeminar Report: Parth Sarthi Sharma - 07010102815 - ECE1Parth Sarthi SharmaNo ratings yet
- Virtual RealityDocument5 pagesVirtual RealityMike jeramie CarascoNo ratings yet
- Virtual RealityDocument64 pagesVirtual RealityBerrezeg MahieddineNo ratings yet
- Final Report (AutoRecovered)Document39 pagesFinal Report (AutoRecovered)Palak KashyapNo ratings yet
- Virtual Reality Head-Mounted Display Oculus VR Kickstarter: Autonomous)Document4 pagesVirtual Reality Head-Mounted Display Oculus VR Kickstarter: Autonomous)Xavi FernandesNo ratings yet
- Virtual-Reality Project ReportDocument13 pagesVirtual-Reality Project ReportAkash DidhariaNo ratings yet
- Virtual Reality GlassesDocument9 pagesVirtual Reality Glassesnicoledpereira13No ratings yet
- Getting Rid of Cybersickness: In Virtual Reality, Augmented Reality, and SimulatorsFrom EverandGetting Rid of Cybersickness: In Virtual Reality, Augmented Reality, and SimulatorsNo ratings yet
- Virtual Reality-An OverviewDocument4 pagesVirtual Reality-An OverviewFor_Educational_PurposeNo ratings yet
- virtual reality worldDocument21 pagesvirtual reality worldmotaabhai8140No ratings yet
- Virtual RealityDocument26 pagesVirtual RealityAb Mff MffNo ratings yet
- Virtual Reality Augmented Reality: Submitted byDocument11 pagesVirtual Reality Augmented Reality: Submitted byRohit SinghNo ratings yet
- Dont Steal ItDocument10 pagesDont Steal Itghafri 12No ratings yet
- A Technical Seminar On: Kamala Institute of Technology & ScienceDocument11 pagesA Technical Seminar On: Kamala Institute of Technology & ScienceKodakandla SindhujaNo ratings yet
- Virtual Reality: CS 620 - Human Computer InteractionDocument50 pagesVirtual Reality: CS 620 - Human Computer InteractionpradnyakaspateNo ratings yet
- Virtual Reality: "Virtuality" Redirects Here. For Other Uses, See - Not To Be Confused WithDocument16 pagesVirtual Reality: "Virtuality" Redirects Here. For Other Uses, See - Not To Be Confused WithCarlo LazaroNo ratings yet
- Blog 4Document7 pagesBlog 4gravitonneutronNo ratings yet
- All EssaysDocument14 pagesAll Essaysapi-373257100No ratings yet
- Trip To Ireland and LondonDocument6 pagesTrip To Ireland and Londonapi-373257100No ratings yet
- Europe Trip ReportDocument7 pagesEurope Trip Reportapi-373257100No ratings yet
- Maui Trip ReportDocument3 pagesMaui Trip Reportapi-373257100No ratings yet
- Incremental Sheet Forming (ISF)Document19 pagesIncremental Sheet Forming (ISF)Ionel RaveicaNo ratings yet
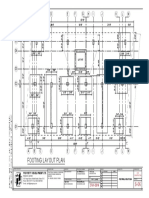
- FootingDocument1 pageFootingEngr.kawsar ahmed100% (1)
- FM357-2 eDocument854 pagesFM357-2 eRafaelNo ratings yet
- GTP 33 KV CT PDFDocument4 pagesGTP 33 KV CT PDFSharafatNo ratings yet
- Lista de precios de filtros para maquinaria agrícola e industrialDocument16 pagesLista de precios de filtros para maquinaria agrícola e industrialSarah Saida Villanueva GuevaraNo ratings yet
- Microprocessor Controlled IGBT Drive Inverter ManualDocument95 pagesMicroprocessor Controlled IGBT Drive Inverter ManualYur Daker Lima100% (1)
- Pre Repair InspectionDocument8 pagesPre Repair InspectionQue Qo ZhyndhyNo ratings yet
- Manta 40Document503 pagesManta 40Alexandros KontosNo ratings yet
- Tdax140x00 PDFDocument4 pagesTdax140x00 PDFDavid FuentesNo ratings yet
- ABCD-WB-08-00 Weight and Balance Report - V1 08.03.16Document12 pagesABCD-WB-08-00 Weight and Balance Report - V1 08.03.16rameshneupaneNo ratings yet
- BiddingsDocument10 pagesBiddingsJoe Mark Costan AvilaNo ratings yet
- Bicycle Wind Turbine PDFDocument7 pagesBicycle Wind Turbine PDFtokagkeloNo ratings yet
- Conventional Sources of EnergyDocument2 pagesConventional Sources of EnergyAlexis AlonsoNo ratings yet
- PaperDocument18 pagesPapermiel0805100% (1)
- Me-331 Design of Machine Elements Unit Iv Design of Basic ElementsDocument25 pagesMe-331 Design of Machine Elements Unit Iv Design of Basic ElementsMuthuvel MNo ratings yet
- Rain LoadDocument6 pagesRain LoadAristo Onan100% (1)
- Conbextra EP10 (M) PDFDocument2 pagesConbextra EP10 (M) PDFBinoy Sankar SarkerNo ratings yet
- Notes For Piles:: 1. 50 Grade Steel Shall Be Used For Shore PileDocument1 pageNotes For Piles:: 1. 50 Grade Steel Shall Be Used For Shore PileSyed ZamanNo ratings yet
- SYMTEC ADMIX AllProdBrochureDocument20 pagesSYMTEC ADMIX AllProdBrochureRodolfo RuaroNo ratings yet
- Building Planning and DrawingDocument26 pagesBuilding Planning and Drawingmoondonoo7No ratings yet
- Hand Book FRP Corner EffectDocument201 pagesHand Book FRP Corner EffectRajinda BintangNo ratings yet
- Additions, Revisions, or Updates: Subject DateDocument4 pagesAdditions, Revisions, or Updates: Subject DateHamilton mirandaNo ratings yet
- 90-94 Passat Engine Lubrication SystemDocument15 pages90-94 Passat Engine Lubrication SystemAales WeldingNo ratings yet
- Test Report ConformanceDocument2 pagesTest Report ConformancePriyadarshini KrishnaswamyNo ratings yet