You might also like
- Cylindrical Compression Helix Springs For Suspension SystemsFrom EverandCylindrical Compression Helix Springs For Suspension SystemsNo ratings yet
- ME364-03 Gears GeneralDocument92 pagesME364-03 Gears GeneralumarNo ratings yet
- Neptel - Design of Brakes-1Document9 pagesNeptel - Design of Brakes-1srideviNo ratings yet
- Eng'Rs Junction: Brake Shoe and Pad FundamentalsDocument16 pagesEng'Rs Junction: Brake Shoe and Pad FundamentalsObsinan BarsanNo ratings yet
- Terminology of Helical SpringDocument4 pagesTerminology of Helical Springsandeep c sNo ratings yet
- Brake System Design and Theory PDFDocument5 pagesBrake System Design and Theory PDFal sarNo ratings yet
- Clutches PDFDocument45 pagesClutches PDFMuhammad Qasim JameelNo ratings yet
- Today's Objectives:: Mass Moment of InertiaDocument15 pagesToday's Objectives:: Mass Moment of InertiaAtef NazNo ratings yet
- Brakes, Clutch and CoplingDocument34 pagesBrakes, Clutch and CoplingBirjesh YaduvanshiNo ratings yet
- Design of A ClutchDocument6 pagesDesign of A Clutchsai ganeshNo ratings yet
- PresentationDocument13 pagesPresentationselva_raj215414No ratings yet
- Types of BrakesDocument12 pagesTypes of Brakesذوالفقار علي حسينNo ratings yet
- Math3705 NotesDocument82 pagesMath3705 NotesmisoNo ratings yet
- Absolute MotionDocument1 pageAbsolute MotionfieraminaNo ratings yet
- Chain Drive PDFDocument3 pagesChain Drive PDFNitin SharmaNo ratings yet
- ZcRcnbHaSOSEXJ2x2sjkQA Chapter5 Plane Kinematics of Rigid Bodies BlankDocument84 pagesZcRcnbHaSOSEXJ2x2sjkQA Chapter5 Plane Kinematics of Rigid Bodies BlankRaj PatelNo ratings yet
- Springs NotesDocument12 pagesSprings NotesKeith Tanaka MagakaNo ratings yet
- PHD Lecture16Document8 pagesPHD Lecture16Roy VeseyNo ratings yet
- Work Power Energy PDFDocument38 pagesWork Power Energy PDFKrizzi Dizon GarciaNo ratings yet
- Formula Collection For LaminatesDocument13 pagesFormula Collection For LaminatesvincentcalardNo ratings yet
- A First Course of Partial Differential Equations in Physical Sciences and Engineering - PDEbookDocument285 pagesA First Course of Partial Differential Equations in Physical Sciences and Engineering - PDEbookheidimary123No ratings yet
- Babaria Institute OF Technology: Designed By: Husain Y Malek. E. NO:140050119038 ROLL NO:14ME38Document28 pagesBabaria Institute OF Technology: Designed By: Husain Y Malek. E. NO:140050119038 ROLL NO:14ME38necromancer18No ratings yet
- Assignment 2: 1 Marion and Thornton Chapter 7Document7 pagesAssignment 2: 1 Marion and Thornton Chapter 7Benjamin MullenNo ratings yet
- Brakes Notes PDFDocument4 pagesBrakes Notes PDFSharmila ShettyNo ratings yet
- Planar Rigid Body Dynamics: Impulse and MomentumDocument8 pagesPlanar Rigid Body Dynamics: Impulse and MomentumnguyendaibkaNo ratings yet
- Disc Brakes ReportDocument3 pagesDisc Brakes ReportÁkshárâ ÀstérikNo ratings yet
- Virtual Work and Power BalanceDocument5 pagesVirtual Work and Power BalanceAlessio ScarabelliNo ratings yet
- Design of ClutchDocument8 pagesDesign of Clutchdnp015No ratings yet
- Analysis of Long Shoe BrakesDocument5 pagesAnalysis of Long Shoe BrakesDeepak ChachraNo ratings yet
- Impulse and MomentumDocument12 pagesImpulse and Momentumshirley cortezNo ratings yet
- Machine Tool # 1Document13 pagesMachine Tool # 1api-26046805No ratings yet
- Classical Lamination TheoryDocument5 pagesClassical Lamination TheoryAlfonso FernandezNo ratings yet
- Part 5 MT Drives and Mechanisms 1Document11 pagesPart 5 MT Drives and Mechanisms 1Anonymous YaJlLHYNo ratings yet
- Moment of Inertia PDFDocument35 pagesMoment of Inertia PDFSwarnalatha SwarnalathaNo ratings yet
- Electric PotentialDocument41 pagesElectric Potentialbry uyNo ratings yet
- What Is Work ? (In Physics)Document20 pagesWhat Is Work ? (In Physics)spreemouseNo ratings yet
- Machine Design - Selection of MaterialDocument8 pagesMachine Design - Selection of MaterialSachin Chaturvedi100% (1)
- Hamilton's PrincipleDocument8 pagesHamilton's Principleletter_ashish4444No ratings yet
- Variational Principles and Lagrange's EquationsDocument102 pagesVariational Principles and Lagrange's EquationsMona AliNo ratings yet
- Ch.11 Virtual WorkDocument2 pagesCh.11 Virtual WorkTanTienNguyenNo ratings yet
- Chapter 01-3 Relative VelocityDocument2 pagesChapter 01-3 Relative VelocityalvinhimNo ratings yet
- Design of ClutchesDocument37 pagesDesign of ClutchesRintu MazumderNo ratings yet
- Disc BrakesDocument21 pagesDisc BrakesKaide Johar BohraNo ratings yet
- What Is FrictionDocument3 pagesWhat Is FrictionJOLLIBEL LLANERANo ratings yet
- Friction Gravity and Elastic Forces Power PoinDocument60 pagesFriction Gravity and Elastic Forces Power PoinMurniNo ratings yet
- CH 3Document22 pagesCH 3zijun yuNo ratings yet
- Classical 6Document10 pagesClassical 6AlexeiNo ratings yet
- Lecture No.01 Polymer EngineeringDocument16 pagesLecture No.01 Polymer Engineeringmm11_nedNo ratings yet
- Analytical Dynamics: Lagrange's Equation and Its Application - A Brief IntroductionDocument23 pagesAnalytical Dynamics: Lagrange's Equation and Its Application - A Brief IntroductionLisaNo ratings yet
- Lecture18 PDFDocument26 pagesLecture18 PDFGökçen Aslan AydemirNo ratings yet
- Activity #1: Naming of Words: ST THDocument15 pagesActivity #1: Naming of Words: ST THABDUL RAHIM G. ACOONNo ratings yet
- Module 3 With SolutionsDocument31 pagesModule 3 With SolutionsGovind GauravNo ratings yet
- CH 13-GearsDocument97 pagesCH 13-GearsGrezy MagnoNo ratings yet
- Gear Geometry & Profile TheoryDocument24 pagesGear Geometry & Profile Theoryansh1983100% (2)
- CH08 2Document52 pagesCH08 2abdallah ghannamNo ratings yet
- Chap-6 Gears 1Document30 pagesChap-6 Gears 1AlysNo ratings yet
- Lecture 05 Bevel GearsDocument26 pagesLecture 05 Bevel GearsAreeba MujtabaNo ratings yet
- Design of Spur GearDocument67 pagesDesign of Spur GearShubham DhurjadNo ratings yet
- 3 - Gear Design PDFDocument136 pages3 - Gear Design PDFRachit100% (1)
- Machine Design Lecture 02 Gears... Spur Gear-Force Analysis, Helical Gears-Terminologies & Force Analysis, Bevel Gears TerminologiesDocument30 pagesMachine Design Lecture 02 Gears... Spur Gear-Force Analysis, Helical Gears-Terminologies & Force Analysis, Bevel Gears TerminologiesMuhammad Naveed 952-FET/BSME/F20No ratings yet
- Tractors Axles: Price List W.E.F. 20-04-2022Document2 pagesTractors Axles: Price List W.E.F. 20-04-2022MM SparesNo ratings yet
- Involute Spline Shafts & Bushings: FeaturesDocument4 pagesInvolute Spline Shafts & Bushings: FeaturesSunilNo ratings yet
- Lesson 3: Power Train Drive SystemsDocument12 pagesLesson 3: Power Train Drive SystemsMaimun maimunNo ratings yet
- Spur Gear PDFDocument8 pagesSpur Gear PDFLovely BalajiNo ratings yet
- FME Ch14Document43 pagesFME Ch14Jessica Tatiana Muñoz OrtizNo ratings yet
- 2024-01-23Document698 pages2024-01-23robertoNo ratings yet
- MK 9Document34 pagesMK 9api-242597694No ratings yet
- Toothed GearingDocument80 pagesToothed GearingArjun RajuNo ratings yet
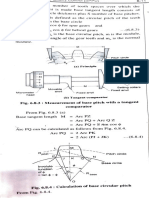
- Base Tangent LengthDocument1 pageBase Tangent LengthKalpesh BawankarNo ratings yet
- Gear TrainDocument26 pagesGear Trainraaz1007No ratings yet
- Spare Parts CatalogueDocument11 pagesSpare Parts CataloguedechetoNo ratings yet
- Bevel Gears - KHK PDFDocument50 pagesBevel Gears - KHK PDFSantiago MolinaNo ratings yet
- Automatic TransmissionDocument20 pagesAutomatic TransmissionDwy Bagus NNo ratings yet
- HMT NH26Document19 pagesHMT NH26Ajay KudalkarNo ratings yet
- Carretos Dente DireitoDocument4 pagesCarretos Dente DireitoNuno RegoNo ratings yet
- Lecture 4Document28 pagesLecture 4Hassan AliNo ratings yet
- Theory of Machines and Mechanisms 4thDocument10 pagesTheory of Machines and Mechanisms 4thseasorn kanyasornNo ratings yet
- 2 - 3 Involute Spur Gear 1Document13 pages2 - 3 Involute Spur Gear 1jiteshpaul100% (1)
- Gears and TransmissionsDocument27 pagesGears and TransmissionsAshish ChaturvediNo ratings yet
- GearsDocument78 pagesGearsL.K. Bhagi100% (1)
- Assembling Bevel Gears: American National StandardDocument49 pagesAssembling Bevel Gears: American National StandardLuis Testa100% (1)
- Gears, Types and ItsDocument22 pagesGears, Types and ItsBravo VermaNo ratings yet
- Non - InvoluteDocument10 pagesNon - InvolutePushparaj VigneshNo ratings yet
- GearDocument76 pagesGearShahzeb AlamgirNo ratings yet
- Combination of Spoket Yamaha LC 135Document1 pageCombination of Spoket Yamaha LC 135Ahmad FaizalNo ratings yet
- Unit - 1 HTDocument57 pagesUnit - 1 HTSoham PendseNo ratings yet
- Carraro Axle 139100 Part BookDocument9 pagesCarraro Axle 139100 Part BookOskars RozefeldsNo ratings yet
- Task 3 (Rev00)Document10 pagesTask 3 (Rev00)Muhammad Izzul HaqNo ratings yet