You might also like
- Lorin W. Anderson, David R. Krathwohl-A Taxonomy For Learning Teaching and Assessing - A Revision of Bloom's Taxonomy of Educational Objetives-Longman (2001)Document168 pagesLorin W. Anderson, David R. Krathwohl-A Taxonomy For Learning Teaching and Assessing - A Revision of Bloom's Taxonomy of Educational Objetives-Longman (2001)Samo Ja100% (5)
- Taxonomy of Educational Objectives, Handbook 1, Cognitive Domain - 0582280109Document111 pagesTaxonomy of Educational Objectives, Handbook 1, Cognitive Domain - 0582280109ALAVALOS100% (21)
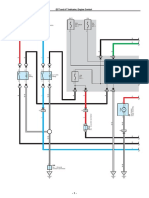
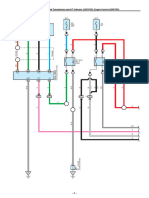
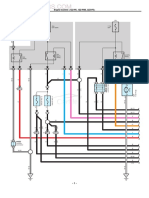
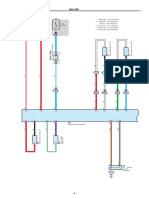
- 6 Vios / Yaris (Cont. Next Page) : Engine ControlDocument5 pages6 Vios / Yaris (Cont. Next Page) : Engine ControlHenryHutabaratNo ratings yet
- Contextualising Critical Design Matt MalpassDocument272 pagesContextualising Critical Design Matt Malpassmjaffarali100% (1)
- Ecu Toyota Nuevo Motor JDM 1NZ 1NZFE JDM Corolla-Yaris-Echo-Scion PDFDocument13 pagesEcu Toyota Nuevo Motor JDM 1NZ 1NZFE JDM Corolla-Yaris-Echo-Scion PDFJaime Villalba FlorNo ratings yet
- Engine Control (1NZ-FE)Document13 pagesEngine Control (1NZ-FE)Mas YadNo ratings yet
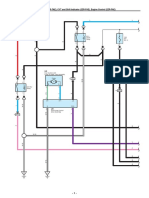
- ECT and A/T Indicator, Engine ControlDocument26 pagesECT and A/T Indicator, Engine ControlTrương Công ĐạtNo ratings yet
- 2GR-FKS ECU Wiring Diagram - ColorDocument45 pages2GR-FKS ECU Wiring Diagram - ColorluzpachecoblNo ratings yet
- Engine Control (1zz-Fe, 1zz-Fbe, 3zz-Fe)Document15 pagesEngine Control (1zz-Fe, 1zz-Fbe, 3zz-Fe)Mas YadNo ratings yet
- 7-Cor PRM-B Me308-309 Air Kotor - r5Document2 pages7-Cor PRM-B Me308-309 Air Kotor - r5adi1darmawan-1No ratings yet
- Ecs 2GDDocument29 pagesEcs 2GDImam DedyNo ratings yet
- Building Plans3Document1 pageBuilding Plans3Evanrey EnriquezNo ratings yet
- Head washer ղࢶQU ৮ࢿػࠂઁೞৈ 1Buigjoefs6Ojuf৻ࢶઁ Qu "MjhotusplfpvutjefDocument22 pagesHead washer ղࢶQU ৮ࢿػࠂઁೞৈ 1Buigjoefs6Ojuf৻ࢶઁ Qu "MjhotusplfpvutjefasdsdsNo ratings yet
- Cruise Control, CVT and Shift Indicator, Engine ControlDocument27 pagesCruise Control, CVT and Shift Indicator, Engine ControlRicardoNo ratings yet
- Diagrama SiennaDocument18 pagesDiagrama SiennaAchinga AquelachingaNo ratings yet
- (TOYOTA) Manual de Taller Diagrama Electrico Toyota Prius 2010 PDFDocument466 pages(TOYOTA) Manual de Taller Diagrama Electrico Toyota Prius 2010 PDFjuaneromarinero100% (1)
- Afs BDocument15 pagesAfs BMaiChiVuNo ratings yet
- Ecu Toyota Corolla Modelo Nuevo 1Document13 pagesEcu Toyota Corolla Modelo Nuevo 1MauricioDiniz100% (1)
- Mezzanine FloorDocument1 pageMezzanine FloormcgNo ratings yet
- Manitou MLT 740h LsuDocument14 pagesManitou MLT 740h LsuCalin SilviuNo ratings yet
- Tab & Notation: The Collab Series Vol.2Document7 pagesTab & Notation: The Collab Series Vol.2Juan Camilo Bernal TellezNo ratings yet
- Abs TMC Made, Trac TMC Made, VSC TMC MadeDocument13 pagesAbs TMC Made, Trac TMC Made, VSC TMC MadeTùng Lâm LêNo ratings yet
- Brake Esc Mitsubishi MNB 17-18H AaaDocument4 pagesBrake Esc Mitsubishi MNB 17-18H Aaathanggimme.phanNo ratings yet
- Stern Display Controller BDDocument3 pagesStern Display Controller BDapi-3713719No ratings yet
- Ls 460Document29 pagesLs 460khan asadNo ratings yet
- 43un7310psc 43un7300psc 43un7300pdc: Aa AaaDocument2 pages43un7310psc 43un7300psc 43un7300pdc: Aa AaaHarley Jhoan Orjuela BallesterosNo ratings yet
- 29 Avanza (Cont. Next Page) : Engine Control (From Aug. 2015 Production)Document5 pages29 Avanza (Cont. Next Page) : Engine Control (From Aug. 2015 Production)Eko Bambang KiswantoNo ratings yet
- Avanza 2015 PDFDocument5 pagesAvanza 2015 PDFargya AwangNo ratings yet
- Ampeg PF-350 Jack Board SchematicsDocument1 pageAmpeg PF-350 Jack Board SchematicsArif SusiloNo ratings yet
- Engine Control (2UZ-FE) : 2003 4RUNNER (EWD514U)Document12 pagesEngine Control (2UZ-FE) : 2003 4RUNNER (EWD514U)Luis RocaNo ratings yet
- Engine Control (2AZ-FE)Document14 pagesEngine Control (2AZ-FE)Pamela Coronado GonzalesNo ratings yet
- 7sj641 ConnectionDocument1 page7sj641 Connectionfreyde alvarez vasquezNo ratings yet
- 15 Chapter 43-10 41-95 PDFDocument16 pages15 Chapter 43-10 41-95 PDFjunior9742No ratings yet
- VFD 1 External GA 230524 141756Document1 pageVFD 1 External GA 230524 141756saravananNo ratings yet
- Wiring ABS CalyaDocument7 pagesWiring ABS Calyakurnia wanNo ratings yet
- Engine Control Toyota Cuiser 2007 - 1GR - FeDocument6 pagesEngine Control Toyota Cuiser 2007 - 1GR - Fe35.Hoàng Xuân TânNo ratings yet
- Engine Control (2002 MR2 Spyder)Document7 pagesEngine Control (2002 MR2 Spyder)Jay MobNo ratings yet
- SGGDocument29 pagesSGGAprilia LarasatiNo ratings yet
- A E B A B: For Comments/Legends For Comments/LegendsDocument1 pageA E B A B: For Comments/Legends For Comments/LegendsChirag MalviyaNo ratings yet
- Cutout Cutout: Slab Reinforcement Schedule:-All Salbs Are 150Mm - Thick.Otherwise SpecifiedDocument1 pageCutout Cutout: Slab Reinforcement Schedule:-All Salbs Are 150Mm - Thick.Otherwise SpecifiedChirag MalviyaNo ratings yet
- A D B C A D B C: Foundation Plan Second Floor Framing PlanDocument1 pageA D B C A D B C: Foundation Plan Second Floor Framing PlanMark Allan RojoNo ratings yet
- Ctr-01-Ba - Edu-Ea - 11110-Rev2 - One Line Diagram Protection & MeasurDocument1 pageCtr-01-Ba - Edu-Ea - 11110-Rev2 - One Line Diagram Protection & MeasurEduardo Ysla VenturaNo ratings yet
- F Electrical Wiring Diagram (System Circuits) (Cont. Next Page) F Electrical Wiring Diagram (System Circuits) (Cont'd)Document1 pageF Electrical Wiring Diagram (System Circuits) (Cont. Next Page) F Electrical Wiring Diagram (System Circuits) (Cont'd)Waleed AlshgaaaNo ratings yet
- Cruise Control, ECT and A/T Indicator, Engine ControlDocument26 pagesCruise Control, ECT and A/T Indicator, Engine ControlJoséLuisNo ratings yet
- Cruise Control, ECT and A/T Indicator, Engine ControlDocument26 pagesCruise Control, ECT and A/T Indicator, Engine ControlKim TâmNo ratings yet
- Manual MotorDocument28 pagesManual Motorelfio bianchiniNo ratings yet
- Diagrama Hilux 2012 (1KD-FTV-DPF - 2KD-FTV VN Turbocharger DPF)Document19 pagesDiagrama Hilux 2012 (1KD-FTV-DPF - 2KD-FTV VN Turbocharger DPF)roger lopez100% (1)
- Ecs 1KD DPFDocument20 pagesEcs 1KD DPFISAAC SIDIBENo ratings yet
- Linea 18 PDFDocument1 pageLinea 18 PDFSergio LealNo ratings yet
- Andre N Solo Section TabDocument7 pagesAndre N Solo Section TabCarlos Iafelice Junior Musica e LazerNo ratings yet
- Earthing Layout & Equipment Earthing Detail PDFDocument1 pageEarthing Layout & Equipment Earthing Detail PDFwaqas_a_shaikh4348No ratings yet
- B.Tech II Year II Semester (R15) Regular Examinations May/June 2017Document2 pagesB.Tech II Year II Semester (R15) Regular Examinations May/June 2017sssssNo ratings yet
- Exterior Perspective Interior Perspective: Edwin M. GumilaDocument10 pagesExterior Perspective Interior Perspective: Edwin M. GumilatintinNo ratings yet
- Ecs 2zrfae 1Document1 pageEcs 2zrfae 1Jehozafat RiscoNo ratings yet
- IOFirebug Engine For Universal Robots Datasheet EnglishDocument2 pagesIOFirebug Engine For Universal Robots Datasheet EnglishMatic DražnikNo ratings yet
- Philips FW-M355 FW-V355Document78 pagesPhilips FW-M355 FW-V355f17439100% (2)
- Take 5 BortolamiDocument4 pagesTake 5 BortolamiStipe TrogrlićNo ratings yet
- 10T500 Briggs Engine Operators ManualDocument28 pages10T500 Briggs Engine Operators Manualcharles blairNo ratings yet
- FlamingDocument11 pagesFlaminghjw45329293No ratings yet
- An Approach For Post Mining of Combined PatternsDocument7 pagesAn Approach For Post Mining of Combined PatternsInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Blooms Taxonomy Question StemsDocument2 pagesBlooms Taxonomy Question StemsMutiara KasihNo ratings yet
- Bloom TaxonomyDocument24 pagesBloom TaxonomyDeepak SharmaNo ratings yet
- Halliday, Matthiessen-Field, Tenor, ModeDocument6 pagesHalliday, Matthiessen-Field, Tenor, ModeBelén SalituriNo ratings yet
- Nursing DXDocument897 pagesNursing DXDuandy Sukma Pradewa100% (1)
- 1.privacy Preservation For Abstracting Anonymization Techniques Using Generalization Algorithm - IJIEMR - Dr. K. Bhavana RajDocument12 pages1.privacy Preservation For Abstracting Anonymization Techniques Using Generalization Algorithm - IJIEMR - Dr. K. Bhavana RajDr. Bhavana Raj KNo ratings yet
- MHealth Taxonomy 2014Document10 pagesMHealth Taxonomy 2014Brhayan Elias Periñan RuizNo ratings yet
- Blooms and SAMR SheetDocument1 pageBlooms and SAMR SheetLouiLordNelson100% (1)
- Taxonomies of Educational ObjectivesDocument7 pagesTaxonomies of Educational ObjectivesrajNo ratings yet
- NATE Module 1 - Week3Document20 pagesNATE Module 1 - Week3Nilesh GhugeNo ratings yet
- Objectives, Evaluation, and The Improvement of Education: Studies in Educational EvaluationDocument12 pagesObjectives, Evaluation, and The Improvement of Education: Studies in Educational EvaluationSandro ToninNo ratings yet
- Bloom's Taxonomy For CS Assessment: Errol Thompson Andrew Luxton-Reilly Jacqueline L. WhalleyDocument8 pagesBloom's Taxonomy For CS Assessment: Errol Thompson Andrew Luxton-Reilly Jacqueline L. Whalleymariana henteaNo ratings yet
- Sherwin 2009 Legal Taxonomy FulltextDocument30 pagesSherwin 2009 Legal Taxonomy FulltextWanda Ayu ANo ratings yet
- Bloom's Revised TaxonomyDocument11 pagesBloom's Revised TaxonomyLyka LaoNo ratings yet
- Bloom's Revised Taxonomy of Educational ObjectivesDocument17 pagesBloom's Revised Taxonomy of Educational ObjectivesRea GoNo ratings yet
- One2 PDFDocument6 pagesOne2 PDFPriya NarayananNo ratings yet
- Bloom's Taxonomy: Educational Objectives (Handbook One, Pp. 201-207)Document3 pagesBloom's Taxonomy: Educational Objectives (Handbook One, Pp. 201-207)Md. Main Uddin BhuiyanNo ratings yet
- Designing Knowledge Assessment Tests (Kats)Document8 pagesDesigning Knowledge Assessment Tests (Kats)Jhedzle Manuel BuenaluzNo ratings yet
- Bloom's Taxonomy of Educational Objectives-RevisedDocument22 pagesBloom's Taxonomy of Educational Objectives-RevisedMiley05100% (2)
- Intended Learning Outcomes: and Student AssessmentDocument43 pagesIntended Learning Outcomes: and Student AssessmentDrr Abd ElmeguiedNo ratings yet
- Prat Et Al. - 2015 - A Taxonomy of Evaluation Methods For Information SDocument40 pagesPrat Et Al. - 2015 - A Taxonomy of Evaluation Methods For Information SNicki GraczykNo ratings yet
- The Second Principle: Anderson and Krathwohl - Bloom's Taxonomy RevisedDocument15 pagesThe Second Principle: Anderson and Krathwohl - Bloom's Taxonomy RevisedRichard VarronNo ratings yet
- Vasconcelos 2016Document13 pagesVasconcelos 2016HochimidNo ratings yet
- Veldpaus L. - In: Heritage: Heritage Taxonomy: Towards A Common Language?Document10 pagesVeldpaus L. - In: Heritage: Heritage Taxonomy: Towards A Common Language?MilicaBožićMarojevićNo ratings yet
- An Overview of Ontology Based Approach To Organize TheDocument6 pagesAn Overview of Ontology Based Approach To Organize TheKrisna AdiyartaNo ratings yet
- Autonomy IDOL Server Technical Brief 1204 Rev1Document6 pagesAutonomy IDOL Server Technical Brief 1204 Rev1Mark AldissNo ratings yet
- A Taxonomy of Financial Market Manipulations: Establishing Trust and Market Integrity in The Financialized Economy Through Automated Fraud DetectionDocument19 pagesA Taxonomy of Financial Market Manipulations: Establishing Trust and Market Integrity in The Financialized Economy Through Automated Fraud DetectionmohammpooyaNo ratings yet