You might also like
- Dockside Container CranesDocument12 pagesDockside Container Cranesthinh_vu5218No ratings yet
- UntitledDocument25 pagesUntitledRoshan MaindanNo ratings yet
- Guide to Single Point Mooring Systems (SPMsDocument14 pagesGuide to Single Point Mooring Systems (SPMsBanjoNo ratings yet
- Cranes at Unique Amsterdam TerminalDocument10 pagesCranes at Unique Amsterdam Terminalthinh_vu5218No ratings yet
- Container Crane Transport Options - Conference Paper PDFDocument10 pagesContainer Crane Transport Options - Conference Paper PDFmaxamaxaNo ratings yet
- SPMDocument24 pagesSPMMS75% (4)
- Rope-Towed Trolley or Machinery TrolleyDocument11 pagesRope-Towed Trolley or Machinery Trolleyflasnicug100% (1)
- Deck Machineries On Board Ship: Presented byDocument8 pagesDeck Machineries On Board Ship: Presented byRaphael Sebuc100% (1)
- Dockside Container Cranes PDFDocument12 pagesDockside Container Cranes PDFmaxamaxa0% (1)
- 5.13.shipyard InfrastructureDocument7 pages5.13.shipyard Infrastructureaimri_cochin100% (1)
- A Design of High Efficient Gantry Crane For Ultra Large Container Ship Young Jin Lee, Jin Ho Suh, Jin Woo Lee, Suk Gyu Lee, and Kwon Soon LeeDocument6 pagesA Design of High Efficient Gantry Crane For Ultra Large Container Ship Young Jin Lee, Jin Ho Suh, Jin Woo Lee, Suk Gyu Lee, and Kwon Soon LeeVictor Hugo ChoqueNo ratings yet
- Research - Ship Crane - CACERES, Gjon Jann D PDFDocument14 pagesResearch - Ship Crane - CACERES, Gjon Jann D PDFGjon Jann CaceresNo ratings yet
- Assignment 2Document4 pagesAssignment 2oconnorr81No ratings yet
- Cargo Handling and Stowage Learning ActivityDocument36 pagesCargo Handling and Stowage Learning ActivityFrednixen Bustamante GapoyNo ratings yet
- Single Point Mooring (SPM) CALM Buoy Systems - The Ultimate GuideDocument19 pagesSingle Point Mooring (SPM) CALM Buoy Systems - The Ultimate Guideprasad336100% (1)
- Rope Towed Trolley or Machinery Trolley PDFDocument11 pagesRope Towed Trolley or Machinery Trolley PDFAdhitya ReNo ratings yet
- Deck Machinery FunctionsDocument31 pagesDeck Machinery FunctionsZarul AshraffNo ratings yet
- Skidbeam LoadoutDocument5 pagesSkidbeam LoadoutBolarinwaNo ratings yet
- SPM Calm Buoy System The Ultimate GuideDocument21 pagesSPM Calm Buoy System The Ultimate Guidemospt100% (1)
- DP Operations Part 2 Paper NIDocument4 pagesDP Operations Part 2 Paper NIparareceberspamsNo ratings yet
- Dynamic PositioningDocument3 pagesDynamic PositioningultrapopeyeNo ratings yet
- Conventional and Emerging Container Terminal ConfigurationsDocument4 pagesConventional and Emerging Container Terminal Configurationsangelica16No ratings yet
- Types of Shipboard CranesDocument5 pagesTypes of Shipboard Cranesegyinspectoryahoo100% (1)
- Deck MachineryDocument16 pagesDeck MachineryMuhammad Basiir HarunNo ratings yet
- Ace-Lp-005 Frog LP Rev - 1Document11 pagesAce-Lp-005 Frog LP Rev - 1AzerNo ratings yet
- Pertemuan X Penanganan Proses Berlabuh JangkarDocument24 pagesPertemuan X Penanganan Proses Berlabuh JangkarRani TribuanaNo ratings yet
- Conceptual Planning of Jebel Ali New Container TerminalDocument8 pagesConceptual Planning of Jebel Ali New Container TerminalAlejandro GarnicaNo ratings yet
- Operate Sheer-Legs Crane BargeDocument3 pagesOperate Sheer-Legs Crane BargeVishal RamakrishnanNo ratings yet
- Ppt:-Deck MachineryDocument35 pagesPpt:-Deck Machineryaimri_cochin81% (32)
- Report On Gantry Crane and Overhead CraneDocument23 pagesReport On Gantry Crane and Overhead CraneAbhay UpadhyayNo ratings yet
- cargo final wordDocument14 pagescargo final worddevmarineacademyNo ratings yet
- Multi Tasker enDocument16 pagesMulti Tasker envicky khan0% (1)
- Port Cargo Handling and Mobile EquipmentsDocument14 pagesPort Cargo Handling and Mobile EquipmentsRoshan MaindanNo ratings yet
- Ferry Car Ramp Operating Mechanism Re Design Engineering EssayDocument13 pagesFerry Car Ramp Operating Mechanism Re Design Engineering EssayHND Assignment HelpNo ratings yet
- Tracklayer ENDocument20 pagesTracklayer ENAdenilson RibeiroNo ratings yet
- Container Handling Efficiency PDFDocument7 pagesContainer Handling Efficiency PDFRheza KhalidNo ratings yet
- ResumoDocument78 pagesResumoMarco Antonio Toscano100% (2)
- Unit 8Document16 pagesUnit 8sahidNo ratings yet
- Types of CraneDocument7 pagesTypes of CraneAltayeb YassinNo ratings yet
- TEU The Future or NotDocument13 pagesTEU The Future or NotVivek NairNo ratings yet
- Building Materials and Construction: Presentation On CranesDocument10 pagesBuilding Materials and Construction: Presentation On Cranesamit jainNo ratings yet
- Lifting PlanDocument66 pagesLifting Planklibi100% (6)
- CraneDocument14 pagesCraneMañas Godwin M.No ratings yet
- Standardized Tractor Tug Commands For Ship-Assist WorkDocument5 pagesStandardized Tractor Tug Commands For Ship-Assist WorkPoyraz Rüzgar100% (1)
- White Paper - DecomDocument12 pagesWhite Paper - DecomRavikumar mahadevNo ratings yet
- 23 ME TalDocument21 pages23 ME TalAndre ConingNo ratings yet
- Deck MachineryDocument10 pagesDeck Machineryaman kumarNo ratings yet
- HEAVY LIFT Loading and Discharge OperationsDocument17 pagesHEAVY LIFT Loading and Discharge OperationsReetam Bose67% (3)
- Simulator Study Done To Determine The Best Possible Manouvere On A Large Container Vessel - AmendedDocument25 pagesSimulator Study Done To Determine The Best Possible Manouvere On A Large Container Vessel - Amendedapi-219509070No ratings yet
- A Comparison Transnav 1 2019Document9 pagesA Comparison Transnav 1 2019rieza_fNo ratings yet
- Design and Development of 3-Way Dropping DumperDocument10 pagesDesign and Development of 3-Way Dropping Dumperlaukik_rautNo ratings yet
- The Knowledge: Craning A Crane: Van Daal Uses A Case Study To Illustrate Several of The Principles andDocument4 pagesThe Knowledge: Craning A Crane: Van Daal Uses A Case Study To Illustrate Several of The Principles andAnonymous UebIaD8A8CNo ratings yet
- Mobile: Truck-Mounted CraneDocument10 pagesMobile: Truck-Mounted CraneYoga RajNo ratings yet
- Tandem Lift ArticleDocument5 pagesTandem Lift ArticleAnh Tuan NguyenNo ratings yet
- Precautions for unloading long welded rail panelsDocument4 pagesPrecautions for unloading long welded rail panelsashokNo ratings yet
- Mhlume Rota-Tipper Cane Off-Loading SystemDocument4 pagesMhlume Rota-Tipper Cane Off-Loading Systembonginkosi mathunjwaNo ratings yet
- Solutions: HelicopterDocument4 pagesSolutions: HelicopterMohit SharmaNo ratings yet
- CargoDocument14 pagesCargoMahamiNo ratings yet
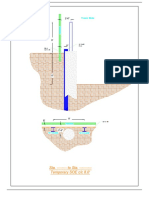
- Temporary SOE 8ft C-CDocument5 pagesTemporary SOE 8ft C-CsamNo ratings yet
- Transportation Considerations in Module Design: 1771 Structures Congress 2014 © ASCE 2014Document11 pagesTransportation Considerations in Module Design: 1771 Structures Congress 2014 © ASCE 2014samNo ratings yet
- 1 5026136777509830799 PDFDocument23 pages1 5026136777509830799 PDFsamNo ratings yet
- Chapter 08 Geotechnical LRFD DesignDocument21 pagesChapter 08 Geotechnical LRFD DesignsamNo ratings yet
- Bridge-Lrfd Theory-Deep FoundationsDocument172 pagesBridge-Lrfd Theory-Deep FoundationsovikbasuNo ratings yet
- Bridge-Lrfd Theory-Deep FoundationsDocument172 pagesBridge-Lrfd Theory-Deep FoundationsovikbasuNo ratings yet
- Design of Seismic Steel StructuresDocument107 pagesDesign of Seismic Steel StructuressamNo ratings yet
- Esr 2047Document22 pagesEsr 2047samNo ratings yet
- Hilti Anchor - KWIK TZDocument2 pagesHilti Anchor - KWIK TZsamNo ratings yet
- Redi RailDocument32 pagesRedi RailsamNo ratings yet
- Transportation Considerations in Module Design: 1771 Structures Congress 2014 © ASCE 2014Document11 pagesTransportation Considerations in Module Design: 1771 Structures Congress 2014 © ASCE 2014samNo ratings yet
- Telegram: BetonaraDocument45 pagesTelegram: BetonarasamNo ratings yet
- Standard Proctor TestDocument28 pagesStandard Proctor TestShuja MalikNo ratings yet
- Bee Line 22Document4 pagesBee Line 22samNo ratings yet
- 4 874952105972990000 PDFDocument181 pages4 874952105972990000 PDFsamNo ratings yet
- FHWA SA 95 037 GeoCirc 1 Dynamic Compaction PDFDocument108 pagesFHWA SA 95 037 GeoCirc 1 Dynamic Compaction PDFloketelokoNo ratings yet
- MRWA Backfill Specification 04-03.2Document34 pagesMRWA Backfill Specification 04-03.2JaybethGeminaBetinolNo ratings yet
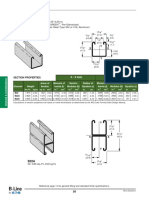
- 90° Angle Fittings: ZN GRN ZN GRNDocument1 page90° Angle Fittings: ZN GRN ZN GRNsamNo ratings yet
- MS Thesis Newgard, JeffreyDocument135 pagesMS Thesis Newgard, JeffreysamNo ratings yet
- Low-Vibration Methods of Soil Compaction for Urban Utility Projects: Phase 2Document145 pagesLow-Vibration Methods of Soil Compaction for Urban Utility Projects: Phase 2samNo ratings yet
- Earthfill and Rockfill Construction GuideDocument32 pagesEarthfill and Rockfill Construction GuidesamNo ratings yet
- Pipe Bedding and Backfill: Geotechnical Training Manual No. 7Document88 pagesPipe Bedding and Backfill: Geotechnical Training Manual No. 7AKASH FERAG100% (1)
- MS Thesis Newgard, JeffreyDocument135 pagesMS Thesis Newgard, JeffreysamNo ratings yet
- Flood CompactionDocument1 pageFlood CompactionsamNo ratings yet
- CompactionDocument24 pagesCompactionSuhaidi AliasNo ratings yet
- Understanding CNC Routers: Creating Forest Sector SolutionsDocument116 pagesUnderstanding CNC Routers: Creating Forest Sector Solutionssam100% (2)
- Elastic-Plastic Fracture Mechanics AnalysisDocument28 pagesElastic-Plastic Fracture Mechanics AnalysisAlberto HernandezNo ratings yet
- Pfuntner - 2014 Wsbs Final PDFDocument11 pagesPfuntner - 2014 Wsbs Final PDFJuan Gutier CcNo ratings yet
- Pole Assembly and Installation For Street Light PolesDocument3 pagesPole Assembly and Installation For Street Light Polestsraj10No ratings yet
- 12 ESCAP - Concepts and Methods For Designing and Operating Dry PortsDocument27 pages12 ESCAP - Concepts and Methods For Designing and Operating Dry Portsattiori fabriceNo ratings yet
- Penstock Erection Procedure - SUHEPDocument7 pagesPenstock Erection Procedure - SUHEPPrasanta MallaNo ratings yet
- Beton Precomprimat Post-TensionatDocument48 pagesBeton Precomprimat Post-TensionatCocis MirceaNo ratings yet
- METHOD STATEMENT FOR Installation of LV Power Cables and WiresDocument12 pagesMETHOD STATEMENT FOR Installation of LV Power Cables and Wiresmazen zaloudNo ratings yet
- RT 8050 T PDFDocument24 pagesRT 8050 T PDFSantiago Hernadez RodriguezNo ratings yet
- Chapter 1 FinalDocument13 pagesChapter 1 FinalThahzeen KazifNo ratings yet
- Comprehensive Safety and Health Program ConstructionDocument15 pagesComprehensive Safety and Health Program ConstructionNina CaliwagNo ratings yet
- Standard For Classification of Wind Turbine Installation UnitsDocument12 pagesStandard For Classification of Wind Turbine Installation UnitsMohammed Abdul SayeedNo ratings yet
- Machine Handling and Installation 4.0Document10 pagesMachine Handling and Installation 4.0Reza KühnNo ratings yet
- The Factories Act, 1965 - 230918 - 112659Document124 pagesThe Factories Act, 1965 - 230918 - 112659rahman2011018No ratings yet
- Method Statement For BR445 Lifting PlanDocument28 pagesMethod Statement For BR445 Lifting PlanJuan Dela Cruz100% (3)
- Ram Xvi and Ram Xvii: DimensionsDocument3 pagesRam Xvi and Ram Xvii: DimensionsNMHaNo ratings yet
- TIME DISTRIBUTION FOR RIG DOWN AT WELL ATD 07Document4 pagesTIME DISTRIBUTION FOR RIG DOWN AT WELL ATD 07Rudy IchwanNo ratings yet
- APMT Bahrain Lifting and Rigging StandardDocument27 pagesAPMT Bahrain Lifting and Rigging StandardYassinNo ratings yet
- Technical Description Ship To Shore Gantry CranesDocument4 pagesTechnical Description Ship To Shore Gantry CranesHerta Dwi SeptariNo ratings yet
- Varun DankeDocument5 pagesVarun DankeTuanHungNo ratings yet
- Best Practices for Securing Steel CargoesDocument108 pagesBest Practices for Securing Steel CargoesVitorloss100% (1)
- Catalog Prolift 2010 enDocument104 pagesCatalog Prolift 2010 engigi_shmen0% (1)
- RT760 Rough Terrain Crane Specs and DimensionsDocument22 pagesRT760 Rough Terrain Crane Specs and DimensionsAnibal Jose Cruz LarezNo ratings yet
- Articulating Crane Reference Manual: National Commission For The Certification of Crane Operators (Nccco)Document72 pagesArticulating Crane Reference Manual: National Commission For The Certification of Crane Operators (Nccco)kenanNo ratings yet
- Lifting & Rigging ProceduresDocument32 pagesLifting & Rigging ProceduresBrunoro DantasNo ratings yet
- WD600-6R Field Assembly (60001-Up)Document84 pagesWD600-6R Field Assembly (60001-Up)Cristobal SepulvedaNo ratings yet
- Liebherr Crane Planner 2.0 Feasibility StudyDocument2 pagesLiebherr Crane Planner 2.0 Feasibility StudyAndré SilvaNo ratings yet
- Jergi 7 - 024 Marine and Offshore Crane - Rev 0Document15 pagesJergi 7 - 024 Marine and Offshore Crane - Rev 0Dion Alfred EucogcoNo ratings yet
- West Oberon 87263Document3 pagesWest Oberon 87263Arturo Treviño MedinaNo ratings yet
- 2 0 2 0 Rigging Study & Lifting Study: SeptemberDocument57 pages2 0 2 0 Rigging Study & Lifting Study: SeptemberTaufan Arif ZulkarnainNo ratings yet
- Crane Matress DesignDocument37 pagesCrane Matress DesignNilesh Kumar100% (1)
- Jsa For LiftingDocument4 pagesJsa For Liftingshaibaz chafekarNo ratings yet
- Dismantling Method StatementDocument53 pagesDismantling Method Statementmilosevicsasa11100% (1)