You might also like
- General Relativity - Lecture NotesDocument3 pagesGeneral Relativity - Lecture NotesGraham Van GoffrierNo ratings yet
- Chapter 1 Cell StructureDocument195 pagesChapter 1 Cell StructureVersha 2021100% (1)
- Solution Manual Mechanical Engineering Design One 8th by ShigleyDocument288 pagesSolution Manual Mechanical Engineering Design One 8th by ShigleyAnonymous HH3dnvF50% (4)
- Presidents Accomplishments With Science and TechnologyDocument19 pagesPresidents Accomplishments With Science and TechnologyClarisse Sollano59% (29)
- Module 5 Developing Mission, Vision, and ValuesDocument25 pagesModule 5 Developing Mission, Vision, and ValuesMatthew ScarellaNo ratings yet
- Job Hazard Analysis Site InspectionDocument12 pagesJob Hazard Analysis Site InspectionNonsoufo eze100% (1)
- Pet Industry in India and ChinaDocument9 pagesPet Industry in India and Chinanetizenarjun20048945No ratings yet
- Six Sigma Presentation BasicsDocument39 pagesSix Sigma Presentation BasicsAnup Dash90% (21)
- Demo Teaching Lesson Plan in MTB Mle 1Document5 pagesDemo Teaching Lesson Plan in MTB Mle 1Aubrey Angel Wisemoron Redoña95% (42)
- Cubex 6200 Spec Sheet PDFDocument4 pagesCubex 6200 Spec Sheet PDFtharciocidreira0% (1)
- Applied Economics - First Summative Answer KeyDocument2 pagesApplied Economics - First Summative Answer KeyKarla BangFer93% (15)
- Six Sigma Presentation BasicsDocument39 pagesSix Sigma Presentation Basicsaliahmad422No ratings yet
- 417 NotesDocument61 pages417 NotesKai McDermottNo ratings yet
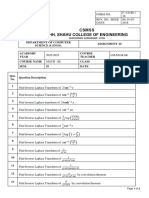
- Laplace Transform: Ñwskéwo%ÑñDocument5 pagesLaplace Transform: Ñwskéwo%ÑñCHAYANIN AKETANANUNNo ratings yet
- APT-Lecture 1Document12 pagesAPT-Lecture 1mujtabaiftikhar156No ratings yet
- Inverse Laplace TransformDocument2 pagesInverse Laplace TransformAdityaNo ratings yet
- Chp-4 Multirate Signal ProcessingDocument159 pagesChp-4 Multirate Signal Processingmhmtyvuzz01No ratings yet
- P Anta− Antb T (K) + Antc K y x γ P P: Antoine equation: Modified Raoults's lawDocument1 pageP Anta− Antb T (K) + Antc K y x γ P P: Antoine equation: Modified Raoults's lawKris PaulNo ratings yet
- Nortons TheoremDocument19 pagesNortons TheoremVitaliana VillaverdeNo ratings yet
- Adobe Scan 09 Sep 2021Document5 pagesAdobe Scan 09 Sep 2021Sunny KumarNo ratings yet
- Twin T Notch Okawa DenshiDocument2 pagesTwin T Notch Okawa DenshiAphagilNo ratings yet
- Circuit Analysis Using KCL (Node Voltage) MethodDocument3 pagesCircuit Analysis Using KCL (Node Voltage) MethodOshane So-confidential Sawyers100% (1)
- Kalibrasi Regresi LinearDocument10 pagesKalibrasi Regresi LinearKevin YouweNo ratings yet
- Drawing6 ObjetDocument1 pageDrawing6 Objetgenave7744No ratings yet
- Chapter 11, Solution 130.: Motion of Truck. AccelerationDocument2 pagesChapter 11, Solution 130.: Motion of Truck. AccelerationLUIS ALEXANDER RODRIGUEZ ZAPATANo ratings yet
- Me SolutionsDocument15 pagesMe SolutionsAnnapareddy RCNo ratings yet
- Adaptive Signal Processing Lect 1Document13 pagesAdaptive Signal Processing Lect 1sliu2002No ratings yet
- ASCII, Decimal, Hexadecimal, Octal, and Binary Conversion TableDocument12 pagesASCII, Decimal, Hexadecimal, Octal, and Binary Conversion TableValicherla NagasaiNo ratings yet
- Kalman Filter: Ekf, UkfDocument17 pagesKalman Filter: Ekf, UkfaerostarkNo ratings yet
- Eigen Value and Eigen VectorDocument19 pagesEigen Value and Eigen Vectorgirma workuNo ratings yet
- Robert Laskowski - Spin-Orbit Coupling and Non-Collinear Magnetism in Wien2kDocument39 pagesRobert Laskowski - Spin-Orbit Coupling and Non-Collinear Magnetism in Wien2kPo48HSDNo ratings yet
- Marco Morales 1161900-Sebastian Cepeda 1161898 Guia 3Document7 pagesMarco Morales 1161900-Sebastian Cepeda 1161898 Guia 3Marco MoralesNo ratings yet
- Interplay Between Theory and Experimentin AFM Nanomechanical Studies of PolymersDocument29 pagesInterplay Between Theory and Experimentin AFM Nanomechanical Studies of PolymersLIAKMANNo ratings yet
- The ParabolaDocument10 pagesThe ParabolaShoaib AhmadNo ratings yet
- Beam Deflection Tables: Cantilever BeamsDocument8 pagesBeam Deflection Tables: Cantilever BeamsBelle SolaceNo ratings yet
- Rizzoni Problemas Capítulo 16Document7 pagesRizzoni Problemas Capítulo 16nicole ortiz0% (1)
- Red AdalineDocument46 pagesRed AdalineJesus Romero MirandaNo ratings yet
- Earth's Magnetic Field: College of Arts and Sciences Mathematics, Statistics and Physics Department Physics ProgramDocument4 pagesEarth's Magnetic Field: College of Arts and Sciences Mathematics, Statistics and Physics Department Physics ProgramAbdulNo ratings yet
- Handout 01 316 1207 PDFDocument5 pagesHandout 01 316 1207 PDFIan CarlsenNo ratings yet
- Chapter 11, Solution 130.: Motion of Truck. AccelerationDocument2 pagesChapter 11, Solution 130.: Motion of Truck. AccelerationLUIS ALEXANDER RODRIGUEZ ZAPATANo ratings yet
- Outline: Week 10 - Laplace Transform Part 2 (Textbook: Ch. 6)Document16 pagesOutline: Week 10 - Laplace Transform Part 2 (Textbook: Ch. 6)siarwafaNo ratings yet
- Brown F.B. - Fundamentals of Monte Carlo Particle Transport. Lecture Notes For Monte Carlo Course PDFDocument403 pagesBrown F.B. - Fundamentals of Monte Carlo Particle Transport. Lecture Notes For Monte Carlo Course PDFnagatopein6No ratings yet
- 05-Laplace Transform and Its InverseDocument54 pages05-Laplace Transform and Its InverseBerentoNo ratings yet
- Reduced Words and Plane Partitions: 1. Main ResultDocument9 pagesReduced Words and Plane Partitions: 1. Main Resultnia rili putri irawanNo ratings yet
- Section 4-5: Solving Ivp'S With Laplace Transforms: F Sfs S F S F SF FDocument9 pagesSection 4-5: Solving Ivp'S With Laplace Transforms: F Sfs S F S F SF FzayedNo ratings yet
- Chapter 16 Application of Laplace TransformDocument68 pagesChapter 16 Application of Laplace TransformdaaanuNo ratings yet
- Econometrics For MPM, LNotes 2Document45 pagesEconometrics For MPM, LNotes 2Barkhad HassanNo ratings yet
- Beam Deflection Tables - MechaniCalcDocument7 pagesBeam Deflection Tables - MechaniCalcakramNo ratings yet
- Interpolation CurvefittingDocument34 pagesInterpolation CurvefittingOzzy JonesNo ratings yet
- Josephson Junctions: 1 Phenomenological DescriptionDocument4 pagesJosephson Junctions: 1 Phenomenological DescriptionAnonymous xgzR9y4No ratings yet
- Flutter Solution by Use of Eigenvalues and Eigenvectors of A Complex General MatrixDocument5 pagesFlutter Solution by Use of Eigenvalues and Eigenvectors of A Complex General MatrixK Laxmith Shetty ce19s002No ratings yet
- Calc Sheet F1 SimpleDocument57 pagesCalc Sheet F1 Simpleم.عمرو عبداللهNo ratings yet
- Lecture28 01Document3 pagesLecture28 01Abdul Raheem JunejoNo ratings yet
- Beam Deflection Tables - MechaniCalcqweqdsdDocument9 pagesBeam Deflection Tables - MechaniCalcqweqdsdKenneth LuceroNo ratings yet
- Quiz2-ECE209 F09 SolnsDocument1 pageQuiz2-ECE209 F09 SolnsrosediodesNo ratings yet
- Control SystemsDocument2 pagesControl SystemsathenalavegaNo ratings yet
- Standard Forms of Parabola With Vertex (0, 0) : 1 RightDocument8 pagesStandard Forms of Parabola With Vertex (0, 0) : 1 RightKenny CantilaNo ratings yet
- Second-Quantization KeyDocument45 pagesSecond-Quantization KeyPABLO ISMAEL LUJAN PRADONo ratings yet
- 2.8 Integrators and Differentiators: Reading AssignmentDocument50 pages2.8 Integrators and Differentiators: Reading AssignmentMiguel AldahirNo ratings yet
- Simplified Calculation of Linear Induction Drives CharacteristicsDocument4 pagesSimplified Calculation of Linear Induction Drives CharacteristicsDilipkumarSureshNo ratings yet
- Beam Deflection Tables - MechaniCalcDocument8 pagesBeam Deflection Tables - MechaniCalcHAFIZNo ratings yet
- PracClass 2 2019 3Document35 pagesPracClass 2 2019 3Maqsood ShaikNo ratings yet
- Exact Shape Functions For Timoshenko Beam Element: IOSR Journal of Computer Engineering May 2017Document10 pagesExact Shape Functions For Timoshenko Beam Element: IOSR Journal of Computer Engineering May 2017Prasant SahayNo ratings yet
- Fir and Iir Transfer Functions: Yn HKXNK Yz HZXZDocument39 pagesFir and Iir Transfer Functions: Yn HKXNK Yz HZXZKAKUL SHRIVASTAVANo ratings yet
- Coursework2 QUANTDocument14 pagesCoursework2 QUANTSamuel GsNo ratings yet
- Lecture13 03 PDFDocument35 pagesLecture13 03 PDFMichael FralaideNo ratings yet
- # Opus Dogru2018Document7 pages# Opus Dogru2018Dev DasNo ratings yet
- We Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For ScientistsDocument19 pagesWe Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For ScientistsDev DasNo ratings yet
- Fellowship Bible Church ConstitutionDocument8 pagesFellowship Bible Church ConstitutionDev DasNo ratings yet
- Organs of Respiration in AnimalsDocument7 pagesOrgans of Respiration in AnimalsDev DasNo ratings yet
- Maths P2 MP2Document21 pagesMaths P2 MP2Dev DasNo ratings yet
- Activity 1 CONDUCTING AN INTERVIEW WITH AN OFWDocument5 pagesActivity 1 CONDUCTING AN INTERVIEW WITH AN OFWSammuel De BelenNo ratings yet
- Chapter 24 - Glass and Glazing PDFDocument14 pagesChapter 24 - Glass and Glazing PDFpokemonNo ratings yet
- Polycab Pricelist 21-01-2019Document5 pagesPolycab Pricelist 21-01-2019KULDEEP TRIPATHINo ratings yet
- Google - Selftestengine.professional Cloud Network Engineer - Brain.dumps.2023 May 04.by - Jared.97q.vceDocument11 pagesGoogle - Selftestengine.professional Cloud Network Engineer - Brain.dumps.2023 May 04.by - Jared.97q.vceahme imtiazNo ratings yet
- William Blomquist: Education SUNY Plattsburgh Work Experience Costco WholesaleDocument1 pageWilliam Blomquist: Education SUNY Plattsburgh Work Experience Costco WholesaleWilliam BlomquistNo ratings yet
- SCIDDocument9 pagesSCIDgarimaupadhyay20002No ratings yet
- IPC Lab 9Document12 pagesIPC Lab 9abdullah1996No ratings yet
- Equipment ListDocument6 pagesEquipment ListJustin GordonNo ratings yet
- MTH 212 OdeDocument18 pagesMTH 212 OdeJames ojochegbNo ratings yet
- Ajna Meditation1Document3 pagesAjna Meditation1Daouda CISSENo ratings yet
- First Mass in The PhilippinesDocument8 pagesFirst Mass in The PhilippinesMj RepilNo ratings yet
- Google Maps Places Scraper 19 Jul 2022Document16 pagesGoogle Maps Places Scraper 19 Jul 2022K. SanjuNo ratings yet
- Mobile Wireless Communications 1St Edition Schwartz Solutions Manual Full Chapter PDFDocument22 pagesMobile Wireless Communications 1St Edition Schwartz Solutions Manual Full Chapter PDFelysiarorym2ek100% (9)
- BFS 6701 - Financial Analytics Using PythonDocument6 pagesBFS 6701 - Financial Analytics Using PythonAman MehtaNo ratings yet
- 01-Thermal Integrity Profiler PDI USF TIPDocument2 pages01-Thermal Integrity Profiler PDI USF TIPAlexandru PoenaruNo ratings yet
- Sumande - Field Work No.8 - Azimuth Traverse Using Theodolite and TapeDocument10 pagesSumande - Field Work No.8 - Azimuth Traverse Using Theodolite and TapeCedrix SumandeNo ratings yet
- How Could Auto Manufacturer Use Transportation To Increase The Efficiency of Supply Chain?Document25 pagesHow Could Auto Manufacturer Use Transportation To Increase The Efficiency of Supply Chain?guddianushaNo ratings yet
- N384518, DW616 RouterDocument7 pagesN384518, DW616 RouterOswaldo Diaz NievesNo ratings yet
- FDARDocument2 pagesFDARMikaella JumandosNo ratings yet
- Harold Bloom'S Psychoanalysis in Peri Sandi Huizhce'S Puisi EsaiDocument5 pagesHarold Bloom'S Psychoanalysis in Peri Sandi Huizhce'S Puisi EsaiAhmadNo ratings yet
- History of ComputerDocument19 pagesHistory of ComputerGarcia Mary Ann T.No ratings yet
- IntroDocument35 pagesIntroApoorvaNo ratings yet