You might also like
- 1.1.3.11 Lab - Draw A Process DiagramDocument4 pages1.1.3.11 Lab - Draw A Process DiagramJoshua ManalotoNo ratings yet
- Procedures or Subprograms: ObjectivesDocument65 pagesProcedures or Subprograms: ObjectivesFebwin VillaceranNo ratings yet
- Data Engineer ResumeDocument1 pageData Engineer ResumeRamy FahimNo ratings yet
- Instant Assessments for Data Tracking, Grade 3: MathFrom EverandInstant Assessments for Data Tracking, Grade 3: MathRating: 5 out of 5 stars5/5 (2)
- Sejal Divekar Resume1Document2 pagesSejal Divekar Resume1Jason StanleyNo ratings yet
- Rainfall PredictionDocument8 pagesRainfall PredictionANIKET DUBEYNo ratings yet
- Tan 2001Document6 pagesTan 2001t123medNo ratings yet
- Assignment 4/5 Statistics 5.301 Due: Nov. 29: Rule 1: If One or More of The Next Seven Samples Yield Values of The SampleDocument6 pagesAssignment 4/5 Statistics 5.301 Due: Nov. 29: Rule 1: If One or More of The Next Seven Samples Yield Values of The SamplePatih Agung SNo ratings yet
- Modelbuilder - Automate ProcessingDocument7 pagesModelbuilder - Automate ProcessingKhalid ChadliNo ratings yet
- Smart Cameras As Embedded Systems-REPORTDocument17 pagesSmart Cameras As Embedded Systems-REPORTRajalaxmi Devagirkar Kangokar100% (1)
- AWS Periodic TableDocument1 pageAWS Periodic Tabledouglas.dvferreiraNo ratings yet
- Apple's CSAM Detection MechanismDocument12 pagesApple's CSAM Detection MechanismMike WuertheleNo ratings yet
- Differential Privacy of Hierarchical Census Data: An Optimization ApproachDocument17 pagesDifferential Privacy of Hierarchical Census Data: An Optimization ApproachJohn SmithNo ratings yet
- ASIC Implementation of Shared LUT Based Distributed Arithmetic in FIR FilterDocument4 pagesASIC Implementation of Shared LUT Based Distributed Arithmetic in FIR Filtermuneeb rahmanNo ratings yet
- Create 360 ImageDocument2 pagesCreate 360 ImagejohnlopezNo ratings yet
- DataBase Jobs To Be MonitoredDocument28 pagesDataBase Jobs To Be MonitoredSurendraNo ratings yet
- 22 11 03-Assignmen (EC7502)Document1 page22 11 03-Assignmen (EC7502)ashu singhNo ratings yet
- Breanna Lee Fall 2023Document1 pageBreanna Lee Fall 2023api-355877355No ratings yet
- 04-2022 WIFS Y BelousovDocument6 pages04-2022 WIFS Y BelousovRémi CogranneNo ratings yet
- Traffic Assignment Algorithm ComparisonDocument36 pagesTraffic Assignment Algorithm ComparisonSiervo Andrés Aguirre BenavidesNo ratings yet
- Cholesky Decomposition and Linear Programming Onagpu: Jin Hyuk Jung, Scholarly Paper Directed by Dianne P. O'LearyDocument21 pagesCholesky Decomposition and Linear Programming Onagpu: Jin Hyuk Jung, Scholarly Paper Directed by Dianne P. O'LearyshivabglNo ratings yet
- App. Algorithms SummaryDocument37 pagesApp. Algorithms SummaryaliNo ratings yet
- My NotesDocument93 pagesMy NotesAlthaf AsharafNo ratings yet
- Gans + Final Practice Questions: Instructor: Preethi JyothiDocument28 pagesGans + Final Practice Questions: Instructor: Preethi JyothiSammy KNo ratings yet
- Denoising Diffusion Probabilistic ModelsDocument25 pagesDenoising Diffusion Probabilistic Modelsgovas53832No ratings yet
- Otn Fec Po Opt TM AeDocument1 pageOtn Fec Po Opt TM Aenobita3No ratings yet
- Cloud Testing PDFDocument13 pagesCloud Testing PDFLavanyenNo ratings yet
- MLOPSDocument56 pagesMLOPSPriyanshu BhatiaNo ratings yet
- Model Tuning - Mentum PlanetDocument36 pagesModel Tuning - Mentum Planettomarnitin19833526No ratings yet
- CarDocument25 pagesCardownload181No ratings yet
- Digium Failover Appliances Application BriefDocument3 pagesDigium Failover Appliances Application Briefmaple4VOIPNo ratings yet
- Advanced Lab GuideDocument21 pagesAdvanced Lab GuideionNo ratings yet
- Xun Huang Multimodal Unsupervised Image-To-Image ECCV 2018 PaperDocument18 pagesXun Huang Multimodal Unsupervised Image-To-Image ECCV 2018 PaperyonasNo ratings yet
- Power Pivot Client Server ArchitectureDocument2 pagesPower Pivot Client Server ArchitectureBalakrishna SappaNo ratings yet
- High-Resolution Radar System Modeling With Matlab/Simulink: ElectronicsDocument7 pagesHigh-Resolution Radar System Modeling With Matlab/Simulink: ElectronicsosamaNo ratings yet
- SNT Notes 2022Document7 pagesSNT Notes 2022OrlinNo ratings yet
- PIPAc Technical Note2Document1 pagePIPAc Technical Note2Jonayed Hossain SarkerNo ratings yet
- 02 - BDAV - Lab Submission 2Document38 pages02 - BDAV - Lab Submission 2zubairNo ratings yet
- Agile Technologies and SqlalchemyDocument34 pagesAgile Technologies and SqlalchemyColorTwist - Resolve DCTL ToolsNo ratings yet
- Status of LSS Cosmology With SDSS BOSS DDocument101 pagesStatus of LSS Cosmology With SDSS BOSS DShreyas BhattNo ratings yet
- Ivy Moss: Teksystems, Florida 6/2022-11/2022 4040 W Boy Scout BLVD, Tampa, FL 33607 (813) 636-3700 Qa ManagerDocument7 pagesIvy Moss: Teksystems, Florida 6/2022-11/2022 4040 W Boy Scout BLVD, Tampa, FL 33607 (813) 636-3700 Qa Managergeetu agarwalNo ratings yet
- Applied Cognitive Informatics and Cognitive Computing On Data ManagementDocument2 pagesApplied Cognitive Informatics and Cognitive Computing On Data ManagementMuthuram RNo ratings yet
- Practical Full Resolution Learned Lossless Image CompressionDocument14 pagesPractical Full Resolution Learned Lossless Image Compressionandreiarhire2708No ratings yet
- Z Resume March 2021Document1 pageZ Resume March 2021Ramy FahimNo ratings yet
- In Edit State:save Key: 0.4mV/V 6mV/VDocument5 pagesIn Edit State:save Key: 0.4mV/V 6mV/VJulian HortaNo ratings yet
- CGAD CGAT FAQsDocument2 pagesCGAD CGAT FAQsIgnacio TabuadaNo ratings yet
- Standard Commissioning Procedure For Daylighting ControlsDocument6 pagesStandard Commissioning Procedure For Daylighting ControlsCarolina HernándezNo ratings yet
- Cyber Security: Start Your Career inDocument2 pagesCyber Security: Start Your Career inMohamed Shafaathullah ShahNo ratings yet
- Whitepaper Cisco DataVault March 2015 V2Document36 pagesWhitepaper Cisco DataVault March 2015 V2OtaNo ratings yet
- Whitepaper Cisco DatavaultDocument36 pagesWhitepaper Cisco DatavaultnewelljjNo ratings yet
- Improving Deep Neural Networks: Hyperparameter Tuning, Regularization and OptimizationDocument1 pageImproving Deep Neural Networks: Hyperparameter Tuning, Regularization and OptimizationSharath Poikayil SatheeshNo ratings yet
- Agile MCQBankDocument15 pagesAgile MCQBankTasneem OsamaNo ratings yet
- Road Safety Forecasts in Five European Countries Using Structural Time-Series ModelsDocument1 pageRoad Safety Forecasts in Five European Countries Using Structural Time-Series ModelsEndashu KeneaNo ratings yet
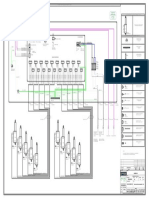
- GRE - eec.D.99.CL.P.07576.12.014.01 Tracker Controller Cable ConnectionsDocument1 pageGRE - eec.D.99.CL.P.07576.12.014.01 Tracker Controller Cable ConnectionsJason DaNny FloResNo ratings yet
- 5 - RESC - Teo - 2122Document50 pages5 - RESC - Teo - 2122paulo.jcr.oliveiraNo ratings yet
- Quantum Autoencoders With Enhanced Data EncodingDocument7 pagesQuantum Autoencoders With Enhanced Data EncodingfoobarukNo ratings yet
- Instant Assessments for Data Tracking, Grade 4: Language ArtsFrom EverandInstant Assessments for Data Tracking, Grade 4: Language ArtsRating: 5 out of 5 stars5/5 (1)
- Sensors 19 00783Document26 pagesSensors 19 00783rohit mittalNo ratings yet
- Machine Learning Project: Name-Rasmita Mallick Date - 5 September 2021Document47 pagesMachine Learning Project: Name-Rasmita Mallick Date - 5 September 2021Ashish Gupta100% (1)
- 3D Display Simulation Using Head Tracking With Microsoft Kinect (Printing)Document167 pages3D Display Simulation Using Head Tracking With Microsoft Kinect (Printing)Manfredas ZabarauskasNo ratings yet
- Kumar 2018Document6 pagesKumar 2018roliho3769No ratings yet
- 189 Cheat Sheet MinicardsDocument2 pages189 Cheat Sheet Minicardst rex422No ratings yet
- Detecting Phishing Websites Using Machine LearningDocument6 pagesDetecting Phishing Websites Using Machine LearningRohan KashyapNo ratings yet
- 05 Ensemble LearningDocument38 pages05 Ensemble LearningAdika StadevantNo ratings yet
- Driver Drowsiness DetectionDocument14 pagesDriver Drowsiness DetectionLaveen Prabhu SNo ratings yet
- Machine Learning PythonDocument48 pagesMachine Learning PythonNarendra WiganaNo ratings yet
- A Crop Recommendation System To Improve Crop ProduDocument5 pagesA Crop Recommendation System To Improve Crop ProduTarun SinghNo ratings yet
- Student Attendance System Using Face RecognitionDocument40 pagesStudent Attendance System Using Face RecognitionAdris NanqueNo ratings yet
- What's Up CAPTCHA? A CAPTCHA Based On Image OrientationDocument15 pagesWhat's Up CAPTCHA? A CAPTCHA Based On Image OrientationGopinath JammulaNo ratings yet
- QCMDocument24 pagesQCMe4201No ratings yet
- 1000 Machine Learning MCQ (Multiple Choice Questions) - SanfoundryDocument16 pages1000 Machine Learning MCQ (Multiple Choice Questions) - Sanfoundrynanimohammed240No ratings yet
- Enseble LEarningDocument57 pagesEnseble LEarningYASH GAIKWAD100% (1)
- An Introduction To Statistical Learning From A Reg PDFDocument25 pagesAn Introduction To Statistical Learning From A Reg PDFJawadNo ratings yet
- ENVI Extensions in IDL: C.1 InstallationDocument17 pagesENVI Extensions in IDL: C.1 InstallationOsman EjameNo ratings yet
- Improving Classification With AdaBoostDocument20 pagesImproving Classification With AdaBoostHawking BearNo ratings yet
- Survey On Face Detection AlgorithmsDocument7 pagesSurvey On Face Detection AlgorithmsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- ML TennisDocument6 pagesML TennisSangeetha KaligitiNo ratings yet
- Road Work ZoneeeeeeeeeeeeeeeeeDocument70 pagesRoad Work ZoneeeeeeeeeeeeeeeeeEugene LabradorNo ratings yet
- Cyberbullying Detection On Twitter Using Machine Learning A ReviewDocument5 pagesCyberbullying Detection On Twitter Using Machine Learning A ReviewInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Computational Data Analysis: Machine LearningDocument26 pagesComputational Data Analysis: Machine LearningVikash MovvaNo ratings yet
- Maximising Operational Uptime: A Strategic Approach To Mitigate Unplanned Machine Downtime and Boost Productivity Using Machine Learning TechniquesDocument13 pagesMaximising Operational Uptime: A Strategic Approach To Mitigate Unplanned Machine Downtime and Boost Productivity Using Machine Learning TechniquesInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Introduction To Machine Learning - BoostingDocument6 pagesIntroduction To Machine Learning - BoostingdNo ratings yet
- Bagging and BoostingDocument33 pagesBagging and BoostingNatali LourençoNo ratings yet
- Arduino Based Face Detection and Tracking SystemDocument45 pagesArduino Based Face Detection and Tracking Systembayissa hailuNo ratings yet
- Stock Market Prediction Using Ensemble LearningDocument48 pagesStock Market Prediction Using Ensemble LearningNoor Md GolamNo ratings yet
- Real Time Finger Tracking and Contour Detection For Gesture Recognition Using OpencvDocument4 pagesReal Time Finger Tracking and Contour Detection For Gesture Recognition Using OpencvRamírez Breña JosecarlosNo ratings yet
- MODULE 4-Dr - GMDocument23 pagesMODULE 4-Dr - GMgeetha megharajNo ratings yet