You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (589)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (842)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5806)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
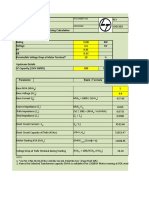
- Transformer Sizing CalculationDocument2 pagesTransformer Sizing CalculationAvishek Chowdhury100% (3)
- Natural Healing Through MacrobioticDocument189 pagesNatural Healing Through MacrobioticFady Nassar100% (9)
- A Review of Rolling Element Bearing Vibration Detection, Diagnosis and PrognosisDocument109 pagesA Review of Rolling Element Bearing Vibration Detection, Diagnosis and PrognosisVirgilioNo ratings yet
- Core Balance CTDocument2 pagesCore Balance CTMurugaraj Muthusamy100% (1)
- Chapter Test FORCEDocument5 pagesChapter Test FORCEArnulfo Villasfer SantiagoNo ratings yet
- Understanding To Equivalent Frame MethodDocument4 pagesUnderstanding To Equivalent Frame MethodNikhil KumbharNo ratings yet
- 7e Lesson PlanDocument9 pages7e Lesson PlanClarita Hablado PidorNo ratings yet
- Resistor FileDocument13 pagesResistor FileSatyajeet KushwahaNo ratings yet
- Water Treatment PlantDocument27 pagesWater Treatment PlantNikhil KumbharNo ratings yet
- Tutorials in Complex Photonic Media SPIE Press Monograph Vol PM194 PDFDocument729 pagesTutorials in Complex Photonic Media SPIE Press Monograph Vol PM194 PDFBadunoniNo ratings yet
- Basement WallDocument6 pagesBasement WallNikhil KumbharNo ratings yet
- Actuator Sizing PrinciplesDocument2 pagesActuator Sizing PrinciplesAntonio LebrunNo ratings yet
- Ansi C57.13-1978Document66 pagesAnsi C57.13-1978Jamila A. Smith100% (1)
- Short Circuit Current Calculation Theory & Techniques PDFDocument32 pagesShort Circuit Current Calculation Theory & Techniques PDFServasflores50% (2)
- Seismic Protection of Structures Using Adaptive Negative Stiffness SystemDocument5 pagesSeismic Protection of Structures Using Adaptive Negative Stiffness SystemNikhil KumbharNo ratings yet
- Determine The Displacement of Point C and The Slope at Point B. EI Is Constant. UseDocument14 pagesDetermine The Displacement of Point C and The Slope at Point B. EI Is Constant. UseNikhil KumbharNo ratings yet
- 1Document7 pages1Nikhil KumbharNo ratings yet
- Assignment III Shear Bond TorsionDocument2 pagesAssignment III Shear Bond TorsionNikhil KumbharNo ratings yet
- Tutorials IDocument4 pagesTutorials INikhil KumbharNo ratings yet
- Water Treatment Plant: Design of Concrete Infrastructural and Industrial StructuresDocument9 pagesWater Treatment Plant: Design of Concrete Infrastructural and Industrial StructuresNikhil KumbharNo ratings yet
- Navier SolutionDocument42 pagesNavier SolutionNikhil KumbharNo ratings yet
- GATE Toppers Mark 2015Document1 pageGATE Toppers Mark 2015Nikhil KumbharNo ratings yet
- Equilibrium and Compatibility TorsionDocument2 pagesEquilibrium and Compatibility TorsionNikhil KumbharNo ratings yet
- ContentDocument10 pagesContentNikhil KumbharNo ratings yet
- LOADSHANDOUTSDocument7 pagesLOADSHANDOUTSSam BarotillaNo ratings yet
- Asgmnt 1 NS EquationDocument2 pagesAsgmnt 1 NS EquationAbdul ArifNo ratings yet
- 1st Assess 2nd Term 2023 Y9Document10 pages1st Assess 2nd Term 2023 Y9Ahsan AhmedNo ratings yet
- 4842f - en - LSA 40 1ph CatalogDocument4 pages4842f - en - LSA 40 1ph CatalogFirst LastNo ratings yet
- Bee Cse Course FileDocument12 pagesBee Cse Course FileJulie OsborneNo ratings yet
- Submittal Rev 2Document264 pagesSubmittal Rev 2Haythamberg AhmedNo ratings yet
- MT Report CommentDocument4 pagesMT Report CommentAsad Bin Ala QatariNo ratings yet
- Smith ChartDocument35 pagesSmith Chartjainam sharma100% (1)
- Week 4 - Instructional Module - EE221 - EE222Document11 pagesWeek 4 - Instructional Module - EE221 - EE222AB CEDENo ratings yet
- 9702 w17 QP 13 PDFDocument20 pages9702 w17 QP 13 PDFDhito PramudyaNo ratings yet
- PhysicsElectromagnetismAH tcm4-726384Document51 pagesPhysicsElectromagnetismAH tcm4-726384Attar RahaNo ratings yet
- The Electrical Properties of Galvanized Steel Conductors For Overhead Transmission Lines.Document14 pagesThe Electrical Properties of Galvanized Steel Conductors For Overhead Transmission Lines.Gokul VenugopalNo ratings yet
- SCIELAS2Document8 pagesSCIELAS2Lorieley EugenioNo ratings yet
- Merowe Dam Project: 10 X 140MVADocument16 pagesMerowe Dam Project: 10 X 140MVAibrahimNo ratings yet
- The Dynamic Response Analysis of Curved Bridge Under The Moving Load, Ren, Jianying, Liu, XingDocument7 pagesThe Dynamic Response Analysis of Curved Bridge Under The Moving Load, Ren, Jianying, Liu, XingHuda AlrikabiNo ratings yet
- Chapter 7Document3 pagesChapter 7Fikri DadiNo ratings yet
- What Is ElectricityDocument22 pagesWhat Is ElectricityLudyLyn Petallana - Sanopo100% (1)
- UGS2009 Assessment of CCL C824 Boulevard Siding Earth Retaining System and Proposal For Strengthening Works, 2009Document8 pagesUGS2009 Assessment of CCL C824 Boulevard Siding Earth Retaining System and Proposal For Strengthening Works, 2009freezefreezeNo ratings yet