You might also like
- Ci CD Pipeline DocumentationDocument18 pagesCi CD Pipeline DocumentationHenok GelanehNo ratings yet
- Cybersecurity ResumeDocument5 pagesCybersecurity Resumesrinu katamsNo ratings yet
- Kia Trouble Code InfoDocument12 pagesKia Trouble Code InfoGala Sn100% (2)
- TRAINING MANUAL PNEUMATICS PROJECT EXERCISESDocument17 pagesTRAINING MANUAL PNEUMATICS PROJECT EXERCISESSriram SastryNo ratings yet
- Aluminum BronzeDocument37 pagesAluminum Bronzepipedown456100% (1)
- Effective User Stories For Agile RequirementsDocument1 pageEffective User Stories For Agile RequirementstullballlNo ratings yet
- Liquid Level Control System V2Document14 pagesLiquid Level Control System V2Shisanu SenNo ratings yet
- Basic Pneumatic Examen PDFDocument34 pagesBasic Pneumatic Examen PDFRosalino Leonides Martinez Marquez100% (1)
- Pressure Control TrainerDocument44 pagesPressure Control TrainerAjeet KumarNo ratings yet
- 12 Air Starting of Diesel EnginesDocument26 pages12 Air Starting of Diesel EnginesCurtler PaquibotNo ratings yet
- Pneumatics Exercises 13Document6 pagesPneumatics Exercises 13KhamilleNo ratings yet
- 01.01 Introduction To Air Traffic ManagementDocument20 pages01.01 Introduction To Air Traffic ManagementRazvan MargauanNo ratings yet
- Anti Surge ControlDocument7 pagesAnti Surge Controlachueth100% (1)
- Create Models of Engineering Systems TutorialDocument28 pagesCreate Models of Engineering Systems TutorialarietoxNo ratings yet
- Protect centrifugal compressor from surgeDocument5 pagesProtect centrifugal compressor from surges1308b100% (2)
- Kaplan Turbine Test Rig Performance AnalysisDocument7 pagesKaplan Turbine Test Rig Performance AnalysisAaditya Aadi100% (1)
- Battery Maintenance Guide For DJI Enterprise DronesDocument10 pagesBattery Maintenance Guide For DJI Enterprise DronesChristiaan De Ridder100% (1)
- Verna Industrial EstateDocument2 pagesVerna Industrial Estatesushant adivirekarNo ratings yet
- Battery How To Measure State of ChargeDocument6 pagesBattery How To Measure State of ChargeGuillermo Lopez-FloresNo ratings yet
- The Source of Hydraulic PowerDocument16 pagesThe Source of Hydraulic Powersekar507100% (1)
- PMI Error CodesDocument1 pagePMI Error CodesLaurian Chirtop100% (1)
- Air Starting System Slide Set 3Document11 pagesAir Starting System Slide Set 3Jigar PatelNo ratings yet
- Steam Generators (Boilers) CLASE ADocument26 pagesSteam Generators (Boilers) CLASE AMiguel Angel ManNo ratings yet
- Lecture VI - PID Controller in Pneumatic System (Use Case)Document21 pagesLecture VI - PID Controller in Pneumatic System (Use Case)R.W. Saputra100% (1)
- Electro-Hydraulic Control System (EHDocument37 pagesElectro-Hydraulic Control System (EHTakeuchi Kyousuke Takato100% (1)
- Pneumatic Circuit Design GuideDocument120 pagesPneumatic Circuit Design GuideKubheran SelvathuraiNo ratings yet
- Actuators convert energy into motionDocument6 pagesActuators convert energy into motionpavan_1988No ratings yet
- TM480 Hydraulic Drive ControlDocument82 pagesTM480 Hydraulic Drive ControlDimas Prasetyo UtomoNo ratings yet
- Engine Lubrication System GuideDocument43 pagesEngine Lubrication System Guidekebaman1986No ratings yet
- Chapter 2 Physical Properties of Hydraulic FluidsDocument108 pagesChapter 2 Physical Properties of Hydraulic FluidsTùng TrầnNo ratings yet
- 1 2kiz6.textbook - Of.finite - Element.Analysis - by.P..Seshu PDFDocument340 pages1 2kiz6.textbook - Of.finite - Element.Analysis - by.P..Seshu PDFmathew1965100% (1)
- Java 3 Object Oriented Programming PDFDocument174 pagesJava 3 Object Oriented Programming PDFThe Underrated artistsNo ratings yet
- East West Institute of Technology: Sadp NotesDocument30 pagesEast West Institute of Technology: Sadp Notesmeghana S MNo ratings yet
- SKEM 3742 Electro Hydraulic LabsheetDocument6 pagesSKEM 3742 Electro Hydraulic Labsheetcikgu_relaNo ratings yet
- Control Lab Manual PDFDocument40 pagesControl Lab Manual PDFKareem TarekNo ratings yet
- Electropneumatic and Hydraulic DNT241: Experiment No. 4Document7 pagesElectropneumatic and Hydraulic DNT241: Experiment No. 4Izz Hanzalah AhmadNo ratings yet
- Automatic Bottle Filling System Using PLC Based Controller: Md. Liton Ahmed, Shantonu Kundu, Md. RafiquzzamanDocument8 pagesAutomatic Bottle Filling System Using PLC Based Controller: Md. Liton Ahmed, Shantonu Kundu, Md. Rafiquzzamanbishal shahNo ratings yet
- Meter in Circuit PDFDocument3 pagesMeter in Circuit PDFShashwat JainNo ratings yet
- Calculation of Indicated and Effective Engine Horse Power Using Indicator DiagramDocument3 pagesCalculation of Indicated and Effective Engine Horse Power Using Indicator DiagramyaelNo ratings yet
- Engine Testing ShopDocument5 pagesEngine Testing ShopSri Ram VikasNo ratings yet
- AMEE310 Lab5Document12 pagesAMEE310 Lab5tsunaseetNo ratings yet
- Hydraulic and Pneumatic SystemsDocument47 pagesHydraulic and Pneumatic SystemsnuncafalhaNo ratings yet
- Neutral Position in DCVDocument6 pagesNeutral Position in DCVAimee SpearsNo ratings yet
- PID Control of Water Level in A Coupled Tank SystemDocument9 pagesPID Control of Water Level in A Coupled Tank SystemEioAsan100% (1)
- Pelton TurbineDocument6 pagesPelton Turbineendoparasite50% (2)
- Solved Numericals in Electrical Topics MEO CLASS 2Document23 pagesSolved Numericals in Electrical Topics MEO CLASS 2sangeet singh Bhanwera100% (1)
- Al-Balqa Applied University Hydraulic and Pneumatic CourseDocument5 pagesAl-Balqa Applied University Hydraulic and Pneumatic CourseayhamNo ratings yet
- Pneumatic Electrical Signal ConversionDocument9 pagesPneumatic Electrical Signal ConversionNeal Christian Parato100% (1)
- تجارب مخبر الهيدروليك طالبDocument150 pagesتجارب مخبر الهيدروليك طالبjndalyfrasNo ratings yet
- Solenoid Lab ManualDocument17 pagesSolenoid Lab Manualbrandon999No ratings yet
- FLUID POWER SYSTEMS Theory and PracticeDocument31 pagesFLUID POWER SYSTEMS Theory and PracticeRAMAR MNo ratings yet
- Lab Report 2: BTM 2243 Fluid Power TechnologyDocument5 pagesLab Report 2: BTM 2243 Fluid Power TechnologyIbrahim AdhamNo ratings yet
- Automation and Robotics LabDocument38 pagesAutomation and Robotics LabRanjit KumarNo ratings yet
- Ihp Unit 6: Pneumatic CircuitsDocument35 pagesIhp Unit 6: Pneumatic CircuitsAkash MarkhaleNo ratings yet
- CHE3162.Lecture11 CascadeDocument33 pagesCHE3162.Lecture11 Cascadexhche7No ratings yet
- I C Engine Lab ManualDocument67 pagesI C Engine Lab ManualBikash ChoudhuriNo ratings yet
- Lecture10 StreamTurbines ReactionTurbineDocument7 pagesLecture10 StreamTurbines ReactionTurbineIjazzzAliNo ratings yet
- Engineering College CBC Scheme B.E. Degree Examination Turbo MachinesDocument25 pagesEngineering College CBC Scheme B.E. Degree Examination Turbo MachinesB K Santosh SanthuNo ratings yet
- Final Year Project ProposalDocument6 pagesFinal Year Project ProposalHarisSafiNo ratings yet
- Manual of Air Purge Level Indicator, DoneDocument8 pagesManual of Air Purge Level Indicator, DoneShoaib PathanNo ratings yet
- Chapter 7 - Hydraulic Operation Circuit and ApplicationDocument19 pagesChapter 7 - Hydraulic Operation Circuit and ApplicationMuhammad AbdullahNo ratings yet
- Homework Mechatronic Chapter 7,8,9 (Fatahul Arifin)Document5 pagesHomework Mechatronic Chapter 7,8,9 (Fatahul Arifin)Fatahul ArifinNo ratings yet
- Refrigerant Leakage and Its DetectionDocument8 pagesRefrigerant Leakage and Its DetectionDeepak0% (1)
- Full ThesisDocument174 pagesFull Thesishasan noahNo ratings yet
- Alpha Lubricator System Operation Manual MC EnginesDocument4 pagesAlpha Lubricator System Operation Manual MC EnginesshashishekharsinghNo ratings yet
- Lesson 8 Final Control ElementDocument9 pagesLesson 8 Final Control ElementRachel Renti CruzNo ratings yet
- Lab Name: Demonstration and Operation of 5KW Steam Power PlantDocument14 pagesLab Name: Demonstration and Operation of 5KW Steam Power PlantFarhan EdwinNo ratings yet
- Piston PumpDocument7 pagesPiston Pumpmohanadymt100% (1)
- Instruction Manual for Osborne Reynolds ApparatusDocument48 pagesInstruction Manual for Osborne Reynolds ApparatusMariel PalisocNo ratings yet
- Controllable Pitch Propeller Pneumatics SystemDocument69 pagesControllable Pitch Propeller Pneumatics SystemBahari Prabowo Aji100% (1)
- Kontrol Pneumatik dan Komponen Kontroler PneumatikDocument18 pagesKontrol Pneumatik dan Komponen Kontroler PneumatikM SONY JAYA WISUDANo ratings yet
- TET-I - 2022 NotificationDocument43 pagesTET-I - 2022 Notificationpavan_1988No ratings yet
- CamScanner Scans PDFs from PhotosDocument5 pagesCamScanner Scans PDFs from Photospavan_1988No ratings yet
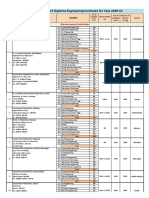
- Provisional List of Diploma Engineering Institutes For Year 2020-21Document13 pagesProvisional List of Diploma Engineering Institutes For Year 2020-21pavan_1988No ratings yet
- Petrochemical Engineering Petrochemical Engineering: 3 Years Diploma/6 Years Dual Degree inDocument2 pagesPetrochemical Engineering Petrochemical Engineering: 3 Years Diploma/6 Years Dual Degree inpavan_1988No ratings yet
- In Mechanical Engineering: About UsDocument2 pagesIn Mechanical Engineering: About Uspavan_1988No ratings yet
- Christi Richards FoeDocument10 pagesChristi Richards Foepavan_1988No ratings yet
- Patel Mihirkumar FoeDocument14 pagesPatel Mihirkumar Foepavan_1988No ratings yet
- 15 - Chapter 7 PDFDocument24 pages15 - Chapter 7 PDFpavan_1988No ratings yet
- Hardness and Wear Rate Od AL LM6 Hollow Cylinder Fabricated Using HDCDocument8 pagesHardness and Wear Rate Od AL LM6 Hollow Cylinder Fabricated Using HDCpavan_1988No ratings yet
- Serials & Reality: Super Gold PackDocument4 pagesSerials & Reality: Super Gold Packpavan_1988No ratings yet
- On The Relationship Between Microstructure, Strength and Toughness in AA7050 Aluminum AlloyDocument11 pagesOn The Relationship Between Microstructure, Strength and Toughness in AA7050 Aluminum Alloypavan_1988No ratings yet
- CAD/CAM Laboratory Manual/TITLEDocument72 pagesCAD/CAM Laboratory Manual/TITLEpavan_1988No ratings yet
- Mitsuhiro Okayasu Amr0204004Document15 pagesMitsuhiro Okayasu Amr0204004pavan_1988No ratings yet
- Pract 2 VBDocument1 pagePract 2 VBpavan_1988No ratings yet
- Wear Thesis PDFDocument68 pagesWear Thesis PDFpavan_1988No ratings yet
- Protecting Melted Zinc-Aluminium Based Foundry Alloys Against Hydrogen Pick-UpDocument3 pagesProtecting Melted Zinc-Aluminium Based Foundry Alloys Against Hydrogen Pick-Uppavan_1988No ratings yet
- Introduction To Pneumatic SystemDocument6 pagesIntroduction To Pneumatic Systempavan_1988No ratings yet
- CompressorsDocument5 pagesCompressorspavan_1988No ratings yet
- 11 - Chapter 2 Literature SurveyDocument29 pages11 - Chapter 2 Literature Surveypavan_1988No ratings yet
- Index: ST ND RDDocument24 pagesIndex: ST ND RDpavan_1988No ratings yet
- Hynne ElementsoftheperiodictableDocument2 pagesHynne ElementsoftheperiodictableHazel Marie EchavezNo ratings yet
- Factorial ExperimentDocument9 pagesFactorial Experimentpavan_1988No ratings yet
- Cad Program PDFDocument8 pagesCad Program PDFDarshan PatelNo ratings yet
- M.tech AMS Sem II Syllabus 2016 17Document11 pagesM.tech AMS Sem II Syllabus 2016 17pavan_1988No ratings yet
- 7th Chintan SibirDocument54 pages7th Chintan Sibirpavan_1988No ratings yet
- Microsoft Office Access 2003Document35 pagesMicrosoft Office Access 2003SharneeshriyaNo ratings yet
- ES6 Object DestructuringDocument4 pagesES6 Object DestructuringbhoomikasettyNo ratings yet
- Web-Based Orphanage Fundraising Information SystemDocument9 pagesWeb-Based Orphanage Fundraising Information SystemoluwoleNo ratings yet
- SRS Groupno1 (1,3,58,63,89)Document15 pagesSRS Groupno1 (1,3,58,63,89)MAYANK JAINNo ratings yet
- 1 InfoSec+Risk MGMTDocument145 pages1 InfoSec+Risk MGMTIslamNo ratings yet
- Tutorial 1 Project Management ConceptDocument13 pagesTutorial 1 Project Management ConceptJIA HUI NGNo ratings yet
- Questions and Bits Object Oriented Analysis and Design Venati SudhakarDocument15 pagesQuestions and Bits Object Oriented Analysis and Design Venati SudhakarcomputerstudentNo ratings yet
- Cadenas CadillacDocument27 pagesCadenas CadillacAlfredo SalasNo ratings yet
- PLC Based Intelligent Traffic Control System: Mirjam NilssonDocument12 pagesPLC Based Intelligent Traffic Control System: Mirjam NilssonMangesh PatilNo ratings yet
- Software Project ManagementDocument41 pagesSoftware Project ManagementGuruKPO100% (1)
- STQA SyllabusDocument2 pagesSTQA SyllabusNeha KumariNo ratings yet
- Class and Object DiagramsDocument19 pagesClass and Object Diagramssantosh581No ratings yet
- Java Quiz 1Document3 pagesJava Quiz 1V100% (2)
- MUL Vouch (Documentation)Document69 pagesMUL Vouch (Documentation)Muhammad saeedNo ratings yet
- IoT-Based Vehicle Diagnostic SystemDocument7 pagesIoT-Based Vehicle Diagnostic SystemSai DatlaNo ratings yet
- Exercise Meeting 5Document3 pagesExercise Meeting 5RanggaNo ratings yet
- Assignment No.3Document2 pagesAssignment No.3Bilal AmjadNo ratings yet
- 11 Most In-Demand Programming Languages in 2021 - Berkeley Boot CampsDocument7 pages11 Most In-Demand Programming Languages in 2021 - Berkeley Boot CampsRodrigo MaiaNo ratings yet
- Medical Store ManagementDocument70 pagesMedical Store ManagementqqwqwaNo ratings yet
- Control Systems (CS) : Lecture-6 Steady State ErrorDocument21 pagesControl Systems (CS) : Lecture-6 Steady State ErrorKiranKumarNo ratings yet
- ISC XII MindmapsDocument12 pagesISC XII Mindmapspraveena k j kiranNo ratings yet
- 1 s2.0 S2351978920301281 MainDocument10 pages1 s2.0 S2351978920301281 MainHa M ZaNo ratings yet
- Authorizations and Roles (BPM)Document6 pagesAuthorizations and Roles (BPM)Arjun GhoseNo ratings yet