You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5811)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Service SpecsDocument46 pagesService SpecsSonny Raymundo100% (1)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Pointer System ArticleDocument9 pagesPointer System ArticleKirangrafix100% (1)
- Contemporary Film TheoryDocument22 pagesContemporary Film TheoryAldyNo ratings yet
- 2010 9185 Moesm1 EsmDocument12 pages2010 9185 Moesm1 EsmMuhammad IqbalNo ratings yet
- CIC Cargo Securing Arrangement Report - P PDFDocument30 pagesCIC Cargo Securing Arrangement Report - P PDFRama KrishnaNo ratings yet
- Bucket 2Document1 pageBucket 2Rama KrishnaNo ratings yet
- B2B 072022 37asxpb9540p1zr GSTR2B 18092022Document7 pagesB2B 072022 37asxpb9540p1zr GSTR2B 18092022Rama KrishnaNo ratings yet
- SEN01996-01 10 Structure, Function and Maintenance StandardDocument1 pageSEN01996-01 10 Structure, Function and Maintenance StandardRama KrishnaNo ratings yet
- Iscode 2008, Partb, Sec 2.9.3Document8 pagesIscode 2008, Partb, Sec 2.9.3Rama KrishnaNo ratings yet
- Tendernotice 1Document58 pagesTendernotice 1Rama KrishnaNo ratings yet
- BucketDocument1 pageBucketRama KrishnaNo ratings yet
- Iw Rules July 2022-EditionDocument358 pagesIw Rules July 2022-EditionRama KrishnaNo ratings yet
- Cost Estimation For 100T OIL BARGEDocument2 pagesCost Estimation For 100T OIL BARGERama KrishnaNo ratings yet
- BoardingPass Journey11342356355278345 SQ2RUTDocument3 pagesBoardingPass Journey11342356355278345 SQ2RUTRama KrishnaNo ratings yet
- Bucket ADocument1 pageBucket ARama KrishnaNo ratings yet
- 6E 2423 1555 Hrs Zone 2 19B: Boarding Pass (Web Check In)Document2 pages6E 2423 1555 Hrs Zone 2 19B: Boarding Pass (Web Check In)Rama KrishnaNo ratings yet
- User Guide For UbooksDocument107 pagesUser Guide For UbooksRama KrishnaNo ratings yet
- 6E 2423 1555 Hrs Zone 2 19C: Boarding Pass (Web Check In)Document2 pages6E 2423 1555 Hrs Zone 2 19C: Boarding Pass (Web Check In)Rama KrishnaNo ratings yet
- Army Public School Clement TownDocument2 pagesArmy Public School Clement TownRama KrishnaNo ratings yet
- Drawing No:-MM/047/106 Rev.0 Page: 03 / 18: "SSVP" Tonnage ComputationsDocument1 pageDrawing No:-MM/047/106 Rev.0 Page: 03 / 18: "SSVP" Tonnage ComputationsRama KrishnaNo ratings yet
- 6 MX 2 MX 8 MMDocument1 page6 MX 2 MX 8 MMRama KrishnaNo ratings yet
- REPORTDocument3 pagesREPORTRama KrishnaNo ratings yet
- Iso 13795:2012 (E)Document2 pagesIso 13795:2012 (E)Rama KrishnaNo ratings yet
- Curriculum Vitae RamakrishnaDocument5 pagesCurriculum Vitae RamakrishnaRama KrishnaNo ratings yet
- Greement FOR OAD INE: (L L O V)Document8 pagesGreement FOR OAD INE: (L L O V)Rama KrishnaNo ratings yet
- Request For Classification: M/S. Sree Sree Venkata Padma TradersDocument5 pagesRequest For Classification: M/S. Sree Sree Venkata Padma TradersRama KrishnaNo ratings yet
- Crane Load Calculator: Provides A Visualisation of The Crane Position and Lifting CapabilitiesDocument2 pagesCrane Load Calculator: Provides A Visualisation of The Crane Position and Lifting CapabilitiesRama KrishnaNo ratings yet
- मतदाता सूचना/Voter InformationDocument1 pageमतदाता सूचना/Voter InformationRama KrishnaNo ratings yet
- Curriculum Vitae RamakrishnaDocument4 pagesCurriculum Vitae RamakrishnaRama KrishnaNo ratings yet
- ERP Benefits RealizationDocument11 pagesERP Benefits Realizationserge ziehiNo ratings yet
- Social Ontology Some Basic Problems by John SearleDocument8 pagesSocial Ontology Some Basic Problems by John SearleRockNo ratings yet
- 6523f06e1b687388faa39bd9 29457302436Document3 pages6523f06e1b687388faa39bd9 29457302436fahimNo ratings yet
- Disciplinesandideasinappliedsocialsciences12 - q1 - Mod2Document18 pagesDisciplinesandideasinappliedsocialsciences12 - q1 - Mod2Bithey BolivarNo ratings yet
- Strong and Weak Forms For One-Dimensional Problems: A First Course in Finite Elements J. Fish and T. BelytschkoDocument6 pagesStrong and Weak Forms For One-Dimensional Problems: A First Course in Finite Elements J. Fish and T. BelytschkoSahab HafeezNo ratings yet
- 002 - El-Hammamy 2010Document13 pages002 - El-Hammamy 2010Amr GamalNo ratings yet
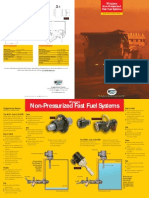
- Wiggins NP Fastfuel PDFDocument2 pagesWiggins NP Fastfuel PDFjokokeNo ratings yet
- LogDocument201 pagesLogdinaNo ratings yet
- RFID Card Reader 125Khz JT308Document2 pagesRFID Card Reader 125Khz JT308markpinoyskybalderasNo ratings yet
- The Multiplicity of Pathways in Urban Life: Interview With Ruth FinneganDocument14 pagesThe Multiplicity of Pathways in Urban Life: Interview With Ruth Finneganpgcosta180879No ratings yet
- Business LetterDocument2 pagesBusiness Letterharish chandraNo ratings yet
- TET Exercises - 2Document3 pagesTET Exercises - 2baotochi87No ratings yet
- FormationDocument26 pagesFormationSophiia MarieNo ratings yet
- Cable TP-D3 220KVDocument13 pagesCable TP-D3 220KVJhon Sanchez ChNo ratings yet
- Allsafe Lanyard DatasheetDocument4 pagesAllsafe Lanyard DatasheetFrans HermantoNo ratings yet
- Applications of Electronics UploadedDocument17 pagesApplications of Electronics UploadedMr. JC NiloNo ratings yet
- Laboratory Glassware and PorcelainDocument14 pagesLaboratory Glassware and PorcelainEduardo GuerraNo ratings yet
- OrificeDocument7 pagesOrificeVarsha GaikwadNo ratings yet
- WORK1Document2 pagesWORK1Edward MirandaNo ratings yet
- G9 Narra Demo LPDocument7 pagesG9 Narra Demo LPJhomar AlvarezNo ratings yet
- IE - Building Partnerships Through CollaborationDocument29 pagesIE - Building Partnerships Through CollaborationALPASLAN TOKERNo ratings yet
- Wulan Purwandari-650294101-Hotel Santika Radial Palembang-HOTEL - STANDALONEDocument2 pagesWulan Purwandari-650294101-Hotel Santika Radial Palembang-HOTEL - STANDALONEHadiyatno HalibNo ratings yet
- Upper and Lower BoundsDocument3 pagesUpper and Lower BoundsGeeth Chameendra0% (1)
- Sebu7687-08 BDocument4 pagesSebu7687-08 Bkevin jeyson merma aragon0% (1)
- Garment Over Dyed Orders SOPDocument3 pagesGarment Over Dyed Orders SOPMahibur RahmanNo ratings yet
- Seal CodingDocument3 pagesSeal CodingSreekanthMylavarapuNo ratings yet