You might also like
- Proclamation 1258 — Rules for the Measurement of Vessels for the Panama CanalFrom EverandProclamation 1258 — Rules for the Measurement of Vessels for the Panama CanalNo ratings yet
- Section 2 I S: 1 General 2 Design CriteriaDocument6 pagesSection 2 I S: 1 General 2 Design Criteriasara_grNo ratings yet
- Intact Stability: Additional ModuleDocument15 pagesIntact Stability: Additional ModuleAlessandroAleottiNo ratings yet
- International Regulations for Preventing Collisions at SeaFrom EverandInternational Regulations for Preventing Collisions at SeaNo ratings yet
- Section 23 Intact and Damage Stability: I - Part 6 GL 2010 Page 23-1Document8 pagesSection 23 Intact and Damage Stability: I - Part 6 GL 2010 Page 23-1JAAK2005No ratings yet
- Case Studies in Fluid Mechanics with Sensitivities to Governing VariablesFrom EverandCase Studies in Fluid Mechanics with Sensitivities to Governing VariablesNo ratings yet
- ABS Stability GuidanceDocument2 pagesABS Stability GuidanceJasmine HaynesNo ratings yet
- GL Guideline Crane Stability 1110 OCRDocument6 pagesGL Guideline Crane Stability 1110 OCRReza BabriNo ratings yet
- Aircraft Weight and Balance Handbook: FAA-H-8083-1AFrom EverandAircraft Weight and Balance Handbook: FAA-H-8083-1ARating: 5 out of 5 stars5/5 (1)
- Intact Stability - Refers To The Stability of A Vessel inDocument4 pagesIntact Stability - Refers To The Stability of A Vessel inrainna merquitaNo ratings yet
- NK Part U StabiltyDocument26 pagesNK Part U StabiltyDian Nafi' AhmadNo ratings yet
- Guide To Mobile CranesDocument8 pagesGuide To Mobile CranesKintali VinodNo ratings yet
- Theory RaisulDocument5 pagesTheory Raisulshahrior.aetNo ratings yet
- Intact Stability - TankersDocument3 pagesIntact Stability - TankersGiorgi KandelakiNo ratings yet
- GL Marine Operations IV-6-10Document14 pagesGL Marine Operations IV-6-10ruovNo ratings yet
- S11 Longitudinal Strength Standard S11: Fs Are As Shown in Fig. 1Document13 pagesS11 Longitudinal Strength Standard S11: Fs Are As Shown in Fig. 1poovendanNo ratings yet
- Barge BallastingDocument2 pagesBarge Ballastingyuvraj koshti100% (2)
- OFFSHORE LOADS TITLEDocument8 pagesOFFSHORE LOADS TITLEnormaszuhailahNo ratings yet
- How To Build An Offshore CraneDocument6 pagesHow To Build An Offshore CranemrjohnwalshNo ratings yet
- Loadcases TaskDocument8 pagesLoadcases TaskMALIK TALHA ALI SAJIDNo ratings yet
- 10.4 Stability Requirements For Heavy Lift OperationsDocument2 pages10.4 Stability Requirements For Heavy Lift OperationsBradley GoldenNo ratings yet
- Section 2 I S: 1 General 2 Design CriteriaDocument6 pagesSection 2 I S: 1 General 2 Design CriteriaMihailo PopovacNo ratings yet
- General Intact Stability Criteria For All ShipsDocument7 pagesGeneral Intact Stability Criteria For All ShipsGiorgi KandelakiNo ratings yet
- C H D CDocument9 pagesC H D CJonathanNo ratings yet
- Intact StabilityDocument1 pageIntact StabilityislimaNo ratings yet
- Accommodation Ladder Inspection RequirementsDocument5 pagesAccommodation Ladder Inspection RequirementsansarALLAAHNo ratings yet
- Design Airspeeds and Maneuvering Loads for Aircraft CertificationDocument9 pagesDesign Airspeeds and Maneuvering Loads for Aircraft CertificationJonathanNo ratings yet
- Design Airspeeds and Limit Load Factors for AircraftDocument9 pagesDesign Airspeeds and Limit Load Factors for AircraftJonathanNo ratings yet
- Safe Loads and ControlsDocument21 pagesSafe Loads and ControlsBayu Arya SNo ratings yet
- Section 2 H S: ULL AND TabilityDocument9 pagesSection 2 H S: ULL AND TabilityFederico BabichNo ratings yet
- HahaDocument9 pagesHahaJonathanNo ratings yet
- How To Build An Offshore CraneDocument5 pagesHow To Build An Offshore CraneWestMarineNo ratings yet
- C H D CDocument9 pagesC H D CJonathanNo ratings yet
- Longitudinal StrengthDocument24 pagesLongitudinal StrengthSiddhant AgarwalNo ratings yet
- Great DesignomicsDocument95 pagesGreat DesignomicsChristopher Allen VarsoviaNo ratings yet
- 12 - StabilityDocument12 pages12 - StabilityWutangNo ratings yet
- Bridge Analysis & Design ProcedureDocument6 pagesBridge Analysis & Design ProcedurePrakash Singh Rawal80% (5)
- LOCG-GEN-Guideline-005 Rev 0 - Gravity Base StructuresDocument32 pagesLOCG-GEN-Guideline-005 Rev 0 - Gravity Base StructuresTomkel Voon100% (1)
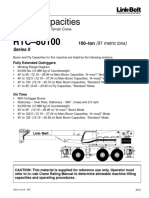
- Lifting Capacities: Series IIDocument28 pagesLifting Capacities: Series IIsrikanthc85No ratings yet
- Comentários MODU ABSDocument5 pagesComentários MODU ABSLucas TarcioNo ratings yet
- Crane Operating Conditions and Counterballasting Criteria for Lifting OperationsDocument3 pagesCrane Operating Conditions and Counterballasting Criteria for Lifting OperationsPrabhakar TiwariNo ratings yet
- Critical KG Curves for Stability AssessmentDocument3 pagesCritical KG Curves for Stability AssessmentNAUTASNo ratings yet
- Bollard Pull Calculations For Towing OperationsDocument17 pagesBollard Pull Calculations For Towing Operationsgksaha0% (1)
- MLC f4 3Document5 pagesMLC f4 3harry stamperNo ratings yet
- Landing Gear Concept SelectionDocument10 pagesLanding Gear Concept SelectionAbo NajjarNo ratings yet
- Guide To Mobile CranesDocument7 pagesGuide To Mobile CranesvigneshNo ratings yet
- AENG 521 - 3 Aircraft Design Ii: Symmetrical & Unsymmetrical Flight Conditions Far Part 23 & 25Document11 pagesAENG 521 - 3 Aircraft Design Ii: Symmetrical & Unsymmetrical Flight Conditions Far Part 23 & 25JonathanNo ratings yet
- Flight Load Standards for Aircraft DesignDocument11 pagesFlight Load Standards for Aircraft DesignJonathanNo ratings yet
- AENG 521 - 3: Symmetrical & Unsymmetrical Flight Conditions Far Part 23 & 25Document11 pagesAENG 521 - 3: Symmetrical & Unsymmetrical Flight Conditions Far Part 23 & 25JonathanNo ratings yet
- S 3 - H G L: Ection ULL Irder OadsDocument3 pagesS 3 - H G L: Ection ULL Irder OadsclinthenNo ratings yet
- Design-Loads Eot CraneDocument11 pagesDesign-Loads Eot CranesteelageNo ratings yet
- Notes To Master of Ship PDFDocument14 pagesNotes To Master of Ship PDFSiva Pasagadugula100% (1)
- Tower Crane Technical Information Note: Construction Plant-Hire AssociationDocument2 pagesTower Crane Technical Information Note: Construction Plant-Hire Associationmuh tahirNo ratings yet
- Airworthiness Standards: Transport Category AirplanesDocument6 pagesAirworthiness Standards: Transport Category AirplanesJonathanNo ratings yet
- Aeng 5: Symmetrical & Unsymmetrical Flightditions Far Part 23 & 25Document11 pagesAeng 5: Symmetrical & Unsymmetrical Flightditions Far Part 23 & 25JonathanNo ratings yet
- Airworthiness Standards: Transport Category AirplanesDocument6 pagesAirworthiness Standards: Transport Category AirplanesJonathanNo ratings yet
- 25.331 Symmetric maneuvering conditionsDocument6 pages25.331 Symmetric maneuvering conditionsJonathanNo ratings yet
- Bollard Pull Calculations For Towing OperationsDocument12 pagesBollard Pull Calculations For Towing OperationsIgnacio SantanaNo ratings yet
- SEN01996-01 Structure Function MaintenanceDocument1 pageSEN01996-01 Structure Function MaintenanceRama KrishnaNo ratings yet
- Omae2013 10035Document7 pagesOmae2013 10035Rama KrishnaNo ratings yet
- BucketDocument1 pageBucketRama KrishnaNo ratings yet
- B2B 072022 37asxpb9540p1zr GSTR2B 18092022Document7 pagesB2B 072022 37asxpb9540p1zr GSTR2B 18092022Rama KrishnaNo ratings yet
- Structure, function and maintenance standard for excavator models PC300-8 and PC350-8Document1 pageStructure, function and maintenance standard for excavator models PC300-8 and PC350-8Rama KrishnaNo ratings yet
- Iw Rules July 2022-EditionDocument358 pagesIw Rules July 2022-EditionRama KrishnaNo ratings yet
- SEN01996-01 10 Structure, Function and Maintenance StandardDocument1 pageSEN01996-01 10 Structure, Function and Maintenance StandardRama KrishnaNo ratings yet
- Cost Estimation For 100T OIL BARGEDocument2 pagesCost Estimation For 100T OIL BARGERama KrishnaNo ratings yet
- Tendernotice 1Document58 pagesTendernotice 1Rama KrishnaNo ratings yet
- Ex1200-6 Specifications: Backhoe Bucket Capacity (Heaped)Document12 pagesEx1200-6 Specifications: Backhoe Bucket Capacity (Heaped)husenNo ratings yet
- BoardingPass Journey11342356355278345 SQ2RUTDocument3 pagesBoardingPass Journey11342356355278345 SQ2RUTRama KrishnaNo ratings yet
- 6E 2423 1555 Hrs Zone 2 19C: Boarding Pass (Web Check In)Document2 pages6E 2423 1555 Hrs Zone 2 19C: Boarding Pass (Web Check In)Rama KrishnaNo ratings yet
- 6E 2423 1555 Hrs Zone 2 19B: Boarding Pass (Web Check In)Document2 pages6E 2423 1555 Hrs Zone 2 19B: Boarding Pass (Web Check In)Rama KrishnaNo ratings yet
- User Guide For UbooksDocument107 pagesUser Guide For UbooksRama KrishnaNo ratings yet
- Drawing No:-MM/047/106 Rev.0 Page: 03 / 18: "SSVP" Tonnage ComputationsDocument1 pageDrawing No:-MM/047/106 Rev.0 Page: 03 / 18: "SSVP" Tonnage ComputationsRama KrishnaNo ratings yet
- Report Card of Army Public School StudentDocument2 pagesReport Card of Army Public School StudentRama KrishnaNo ratings yet
- 6 MX 2 MX 8 MMDocument1 page6 MX 2 MX 8 MMRama KrishnaNo ratings yet
- Inclining test resultsDocument3 pagesInclining test resultsRama KrishnaNo ratings yet
- Iso 13795:2012 (E)Document2 pagesIso 13795:2012 (E)Rama KrishnaNo ratings yet
- CIC Cargo Securing Arrangement Report - P PDFDocument30 pagesCIC Cargo Securing Arrangement Report - P PDFRama KrishnaNo ratings yet
- Request For Classification: M/S. Sree Sree Venkata Padma TradersDocument5 pagesRequest For Classification: M/S. Sree Sree Venkata Padma TradersRama KrishnaNo ratings yet
- Microsoft Word - Ch0 Cover TitleDocument1 pageMicrosoft Word - Ch0 Cover TitleRama KrishnaNo ratings yet
- Guidelines For Lifting Operations by Floating Vessels CranesDocument36 pagesGuidelines For Lifting Operations by Floating Vessels CranesKin Lai KongNo ratings yet
- Rigging ShipsDocument28 pagesRigging Shipsgeorgekc77No ratings yet
- BP USPL Lifting and Rigging Safety Manual Key RequirementsDocument19 pagesBP USPL Lifting and Rigging Safety Manual Key RequirementsbalasubramaniamNo ratings yet
- ProfileDocument6 pagesProfileRama KrishnaNo ratings yet
- Barge Stability GuidelinesDocument10 pagesBarge Stability Guidelinesnautilus73100% (2)
- Crane Load Calculator: Provides A Visualisation of The Crane Position and Lifting CapabilitiesDocument2 pagesCrane Load Calculator: Provides A Visualisation of The Crane Position and Lifting CapabilitiesRama KrishnaNo ratings yet
- SANPRIDE Trim & Stability Book: Fully Loaded Departure With 100% ConsumablesDocument55 pagesSANPRIDE Trim & Stability Book: Fully Loaded Departure With 100% ConsumablesRama KrishnaNo ratings yet
- Site Selection and Layout Planning for Small BusinessesDocument4 pagesSite Selection and Layout Planning for Small Businesseseric swaNo ratings yet
- Filtra Ajri: Mann Code Cmimi/lekDocument4 pagesFiltra Ajri: Mann Code Cmimi/lekLori NaciNo ratings yet
- PML - Assessment of Civil Engineering ProjectsDocument33 pagesPML - Assessment of Civil Engineering Projectsjosean_mNo ratings yet
- Electric Car vs. Hydrogen Fuel Cell CarsDocument4 pagesElectric Car vs. Hydrogen Fuel Cell CarsBen GalNo ratings yet
- Cape Argus Reporting June-July 2009Document22 pagesCape Argus Reporting June-July 2009Richie DuchonNo ratings yet
- Gb-Ema-Em4: M 0 0 1 NhubDocument2 pagesGb-Ema-Em4: M 0 0 1 Nhub18harriscNo ratings yet
- History of PuneDocument64 pagesHistory of PuneAlex LeeNo ratings yet
- Let There Be Light Lamp Shade CompanyDocument3 pagesLet There Be Light Lamp Shade CompanyVy KhánhNo ratings yet
- Coca - Cola: Brindavan Bottlers Pvt. Ltd. Summer Internship Report On Vertical Growth ofDocument86 pagesCoca - Cola: Brindavan Bottlers Pvt. Ltd. Summer Internship Report On Vertical Growth ofKarishma SinghNo ratings yet
- No Part Number Deskripsi Price List Disc 25% Net Price PPN 10% Total Price RemarksDocument1 pageNo Part Number Deskripsi Price List Disc 25% Net Price PPN 10% Total Price Remarksksdgroup 8No ratings yet
- List of Award Winners OF Rajiv Gandhi National Quality AwardsDocument19 pagesList of Award Winners OF Rajiv Gandhi National Quality AwardsAjay KaushikNo ratings yet
- Rear Axle Operation PDFDocument4 pagesRear Axle Operation PDFparchure123No ratings yet
- Procedure Ship Security Officer Training Module WorkbookDocument19 pagesProcedure Ship Security Officer Training Module WorkbookBao TranNo ratings yet
- SEMAC Newsletter Mar-Apr 2010Document14 pagesSEMAC Newsletter Mar-Apr 2010aussibobNo ratings yet
- LC4 - Port of Ravens Bluff PDFDocument68 pagesLC4 - Port of Ravens Bluff PDFChevere5100% (3)
- Role of IcdDocument23 pagesRole of Icdrajeev230375% (4)
- Petrobras 1Document52 pagesPetrobras 1xxx100% (1)
- Impaired Driving Prevention MonthDocument1 pageImpaired Driving Prevention MonthWWMTNo ratings yet
- Catalogo de MotoresDocument234 pagesCatalogo de MotoresRosa SilvaNo ratings yet
- What Is DTS-iDocument8 pagesWhat Is DTS-iGaurao WarungaseNo ratings yet
- Mathews Roller ConveyorsDocument136 pagesMathews Roller ConveyorsSergio Fernandes PereiraNo ratings yet
- Engine Cooling System: SectionDocument28 pagesEngine Cooling System: SectionLino Bello RezamanoNo ratings yet
- Earthworks Operation and EquipmentDocument37 pagesEarthworks Operation and EquipmentCarol Tumaneng100% (1)
- Catalogo de SelecciónDocument24 pagesCatalogo de SelecciónOscar Ernesto RamírezNo ratings yet
- Ras Bufontas: Discover Qatar Free ZonesDocument2 pagesRas Bufontas: Discover Qatar Free Zonesnzm1No ratings yet
- RFCL ASSISTANT MANAGER (ELECTRICAL) PDFDocument5 pagesRFCL ASSISTANT MANAGER (ELECTRICAL) PDFSwarup NayakNo ratings yet
- EriaduDocument1 pageEriadup_haganNo ratings yet
- Handout For Writing Task 1 For CILACSDocument11 pagesHandout For Writing Task 1 For CILACSaddi.No ratings yet
- Key Word Transformations For b1 Connect SeriesDocument2 pagesKey Word Transformations For b1 Connect SeriescooladillaNo ratings yet
- Government Approval for New Petrol StationDocument4 pagesGovernment Approval for New Petrol Stationsandeep bandaruNo ratings yet
- Shorting the Grid: The Hidden Fragility of Our Electric GridFrom EverandShorting the Grid: The Hidden Fragility of Our Electric GridRating: 4.5 out of 5 stars4.5/5 (2)
- Introduction to Power System ProtectionFrom EverandIntroduction to Power System ProtectionRating: 5 out of 5 stars5/5 (1)
- Idaho Falls: The Untold Story of America's First Nuclear AccidentFrom EverandIdaho Falls: The Untold Story of America's First Nuclear AccidentRating: 4.5 out of 5 stars4.5/5 (21)
- Power of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesFrom EverandPower of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesRating: 4.5 out of 5 stars4.5/5 (21)
- OFF-GRID PROJECTS: A Comprehensive Beginner's Guide to Learn All about OffGrid Living from A-Z and Live a Life of Self-SufficiencyFrom EverandOFF-GRID PROJECTS: A Comprehensive Beginner's Guide to Learn All about OffGrid Living from A-Z and Live a Life of Self-SufficiencyNo ratings yet
- Asset Integrity Management for Offshore and Onshore StructuresFrom EverandAsset Integrity Management for Offshore and Onshore StructuresNo ratings yet
- Nuclear Energy in the 21st Century: World Nuclear University PressFrom EverandNuclear Energy in the 21st Century: World Nuclear University PressRating: 4.5 out of 5 stars4.5/5 (3)
- Build Your Own Electric Vehicle, Third EditionFrom EverandBuild Your Own Electric Vehicle, Third EditionRating: 4.5 out of 5 stars4.5/5 (3)
- The Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialFrom EverandThe Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialNo ratings yet
- The New 3D Layout for Oil & Gas Offshore Projects: How to ensure successFrom EverandThe New 3D Layout for Oil & Gas Offshore Projects: How to ensure successRating: 4.5 out of 5 stars4.5/5 (3)
- Renewable Energy: A Very Short IntroductionFrom EverandRenewable Energy: A Very Short IntroductionRating: 4.5 out of 5 stars4.5/5 (12)
- Implementing an Integrated Management System (IMS): The strategic approachFrom EverandImplementing an Integrated Management System (IMS): The strategic approachRating: 5 out of 5 stars5/5 (2)
- The Grid: The Fraying Wires Between Americans and Our Energy FutureFrom EverandThe Grid: The Fraying Wires Between Americans and Our Energy FutureRating: 3.5 out of 5 stars3.5/5 (48)
- The Boy Who Harnessed the Wind: Creating Currents of Electricity and HopeFrom EverandThe Boy Who Harnessed the Wind: Creating Currents of Electricity and HopeRating: 4 out of 5 stars4/5 (130)
- The Rare Metals War: the dark side of clean energy and digital technologiesFrom EverandThe Rare Metals War: the dark side of clean energy and digital technologiesRating: 5 out of 5 stars5/5 (2)
- Industrial Piping and Equipment Estimating ManualFrom EverandIndustrial Piping and Equipment Estimating ManualRating: 5 out of 5 stars5/5 (7)
- ISO 50001: A strategic guide to establishing an energy management systemFrom EverandISO 50001: A strategic guide to establishing an energy management systemNo ratings yet
- Handbook on Battery Energy Storage SystemFrom EverandHandbook on Battery Energy Storage SystemRating: 4.5 out of 5 stars4.5/5 (2)
- Energy, Light and Electricity - Introduction to Physics - Physics Book for 12 Year Old | Children's Physics BooksFrom EverandEnergy, Light and Electricity - Introduction to Physics - Physics Book for 12 Year Old | Children's Physics BooksNo ratings yet
- Machine Learning and Data Science in the Oil and Gas Industry: Best Practices, Tools, and Case StudiesFrom EverandMachine Learning and Data Science in the Oil and Gas Industry: Best Practices, Tools, and Case StudiesPatrick BangertRating: 3 out of 5 stars3/5 (2)
- Formulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsFrom EverandFormulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsNo ratings yet
- Solar Electricity Basics: Powering Your Home or Office with Solar EnergyFrom EverandSolar Electricity Basics: Powering Your Home or Office with Solar EnergyRating: 5 out of 5 stars5/5 (3)
- Well Control for Completions and InterventionsFrom EverandWell Control for Completions and InterventionsRating: 4 out of 5 stars4/5 (10)
- Oil and Gas Pipelines and Piping Systems: Design, Construction, Management, and InspectionFrom EverandOil and Gas Pipelines and Piping Systems: Design, Construction, Management, and InspectionRating: 4.5 out of 5 stars4.5/5 (16)