You might also like
- 05 Grain CargoDocument57 pages05 Grain Cargosaurabh1906100% (2)
- Okavango Owner - S Manual - Reduced SizeDocument122 pagesOkavango Owner - S Manual - Reduced SizeLambertGuevarra100% (1)
- Mates StabilityDocument21 pagesMates Stabilitypaulsimpson10192% (12)
- Project D1 - Ship Stability, Brem PavloDocument9 pagesProject D1 - Ship Stability, Brem PavloПавел БремNo ratings yet
- Stability BookletDocument153 pagesStability Booklettahtoh25100% (5)
- Bollard Pull Calculations For Towing OperationsDocument17 pagesBollard Pull Calculations For Towing Operationsgksaha0% (1)
- Understanding Intact & Damage Stability of ShipsDocument3 pagesUnderstanding Intact & Damage Stability of ShipsGiorgi KandelakiNo ratings yet
- Cargo ManifestDocument3 pagesCargo ManifestmotasimamuNo ratings yet
- 12 - StabilityDocument12 pages12 - StabilityWutangNo ratings yet
- Theory RaisulDocument5 pagesTheory Raisulshahrior.aetNo ratings yet
- Damaged StabilityDocument4 pagesDamaged StabilityUjjwal VermaNo ratings yet
- Loadcases TaskDocument8 pagesLoadcases TaskMALIK TALHA ALI SAJIDNo ratings yet
- Intact Stability: Additional ModuleDocument15 pagesIntact Stability: Additional ModuleAlessandroAleottiNo ratings yet
- General Intact Stability Criteria For All ShipsDocument7 pagesGeneral Intact Stability Criteria For All ShipsGiorgi KandelakiNo ratings yet
- ABS Stability GuidanceDocument2 pagesABS Stability GuidanceJasmine HaynesNo ratings yet
- NK Part U StabiltyDocument26 pagesNK Part U StabiltyDian Nafi' AhmadNo ratings yet
- Section 23 Intact and Damage Stability: I - Part 6 GL 2010 Page 23-1Document8 pagesSection 23 Intact and Damage Stability: I - Part 6 GL 2010 Page 23-1JAAK2005No ratings yet
- Section 2 I S: 1 General 2 Design CriteriaDocument6 pagesSection 2 I S: 1 General 2 Design Criteriasara_grNo ratings yet
- Intact Stability - TankersDocument3 pagesIntact Stability - TankersGiorgi KandelakiNo ratings yet
- Barge BallastingDocument2 pagesBarge Ballastingyuvraj koshti100% (2)
- MLC f4 3Document5 pagesMLC f4 3harry stamperNo ratings yet
- Intact Stability CriteriaDocument4 pagesIntact Stability CriteriaAmit TomerNo ratings yet
- Mates Stability 1 PDFDocument21 pagesMates Stability 1 PDFSergey Vasilievich ChetverichenkoNo ratings yet
- Example of Transport Force CalculationDocument2 pagesExample of Transport Force CalculationYanrong YuNo ratings yet
- Seam 3bDocument8 pagesSeam 3bjun franklin fundalNo ratings yet
- Intact StabilityDocument1 pageIntact StabilityislimaNo ratings yet
- Iscode 2008, Partb, Sec 2.9.3Document8 pagesIscode 2008, Partb, Sec 2.9.3Rama KrishnaNo ratings yet
- Preliminary Trim and Stability BookletDocument13 pagesPreliminary Trim and Stability Bookletmdmk2937100% (4)
- 02 StabilityDocument8 pages02 StabilityLucky BoatNo ratings yet
- Notes To Master of Ship PDFDocument14 pagesNotes To Master of Ship PDFSiva Pasagadugula100% (1)
- Day 3Document16 pagesDay 3MALIK TALHA ALI SAJIDNo ratings yet
- Buenaventura SEAM 2 MIDTERM Assignment 4Document2 pagesBuenaventura SEAM 2 MIDTERM Assignment 4Joshua CandagananNo ratings yet
- GL Guideline Crane Stability 1110 OCRDocument6 pagesGL Guideline Crane Stability 1110 OCRReza BabriNo ratings yet
- Maxsurf Stability Quick StartDocument5 pagesMaxsurf Stability Quick StartMALIK TALHA ALI SAJIDNo ratings yet
- EOC Naval 2Document13 pagesEOC Naval 2Aiman AriefNo ratings yet
- Submitted By-Ajendra Singh Mtech Ist YearDocument23 pagesSubmitted By-Ajendra Singh Mtech Ist YearaksasinghNo ratings yet
- 138Document3 pages138Moudgalya VedamNo ratings yet
- Assignment 2 Intact Stabilty Nurul AiyaniDocument4 pagesAssignment 2 Intact Stabilty Nurul AiyaniNURUL AIYANI ALIPHIANNo ratings yet
- Stability Talkie TalkieDocument46 pagesStability Talkie TalkieSakthi Javelin100% (1)
- Stability Theory With Ques and AnsDocument25 pagesStability Theory With Ques and AnsAnkit BatraNo ratings yet
- Bollard Pull Calculations For Towing OperationsDocument12 pagesBollard Pull Calculations For Towing OperationsIgnacio SantanaNo ratings yet
- Stability IntroDocument3 pagesStability Introsurferdoug1No ratings yet
- Phase 1 Stability - CompressedDocument16 pagesPhase 1 Stability - CompressedSam UelNo ratings yet
- Open Barge Stability PDFDocument2 pagesOpen Barge Stability PDFmaaathanNo ratings yet
- StabilityDocument3 pagesStabilityJeremy ParkerNo ratings yet
- Matlab TutorialDocument55 pagesMatlab TutorialSahil JawaNo ratings yet
- P020213 Stability BookDocument115 pagesP020213 Stability BookPETERNo ratings yet
- Selection of FenderDocument11 pagesSelection of FenderOkondu ChieduNo ratings yet
- What Is Baseline of A ShipDocument11 pagesWhat Is Baseline of A ShipSwarg Vibha100% (1)
- Stability Information Booklet: DATE: xx/xx/200XDocument24 pagesStability Information Booklet: DATE: xx/xx/200XacallevillNo ratings yet
- Week 5 OOW Transvers Statice StabilityDocument18 pagesWeek 5 OOW Transvers Statice StabilityAmin Al QawasmehNo ratings yet
- Selection of FenderDocument11 pagesSelection of FenderKpChuaNo ratings yet
- Stability Theory Notes: For SCOTVEC Stability ExamsDocument28 pagesStability Theory Notes: For SCOTVEC Stability ExamsRigel NathNo ratings yet
- Phase 2 Stability NotesDocument9 pagesPhase 2 Stability NotesmanNo ratings yet
- Stability CriteriaDocument7 pagesStability CriteriaSuperducksNo ratings yet
- IACS REC24 StabilityDocument2 pagesIACS REC24 StabilityAlinaNo ratings yet
- Type A and B ExplainDocument17 pagesType A and B ExplainAung Htet KyawNo ratings yet
- Scotvec (Stabiltiy) Theory: Table of ContentsDocument25 pagesScotvec (Stabiltiy) Theory: Table of ContentsMohan KrishnanNo ratings yet
- Proclamation 1258 — Rules for the Measurement of Vessels for the Panama CanalFrom EverandProclamation 1258 — Rules for the Measurement of Vessels for the Panama CanalNo ratings yet
- International Regulations for Preventing Collisions at SeaFrom EverandInternational Regulations for Preventing Collisions at SeaNo ratings yet
- Green Minimalist Professional Business Proposal PresentationDocument16 pagesGreen Minimalist Professional Business Proposal Presentationrainna merquitaNo ratings yet
- Green Minimalist Professional Business Proposal PresentationDocument16 pagesGreen Minimalist Professional Business Proposal Presentationrainna merquitaNo ratings yet
- Irpcs 1972Document7 pagesIrpcs 1972rainna merquitaNo ratings yet
- Irpcs 1972Document7 pagesIrpcs 1972rainna merquitaNo ratings yet
- WK 1 TOPIC Six Motions of A Ship & PricipalDimensionsDocument3 pagesWK 1 TOPIC Six Motions of A Ship & PricipalDimensionsrainna merquitaNo ratings yet
- WK 1 TOPIC Six Motions of A Ship & PricipalDimensionsDocument3 pagesWK 1 TOPIC Six Motions of A Ship & PricipalDimensionsrainna merquitaNo ratings yet
- Acs Periodic Table Poster - DownloadDocument1 pageAcs Periodic Table Poster - DownloaditechhacksNo ratings yet
- Buys Ballot'S LawDocument14 pagesBuys Ballot'S Lawrainna merquitaNo ratings yet
- WK 6 Topic - Parameters Related To Ship's StabilityDocument4 pagesWK 6 Topic - Parameters Related To Ship's Stabilityrainna merquitaNo ratings yet
- wkk5 BLANC TIDAL PREDICTION FORMDocument1 pagewkk5 BLANC TIDAL PREDICTION FORMrainna merquitaNo ratings yet
- TTTTDocument2 pagesTTTTrainna merquitaNo ratings yet
- Taxiing: Preflight: PreflightDocument8 pagesTaxiing: Preflight: PreflightSamson Hailu KNo ratings yet
- Index PDFDocument5 pagesIndex PDFSamir YehyaNo ratings yet
- Common CarriersDocument35 pagesCommon CarriersHazel Faye JardinicoNo ratings yet
- Vector Voyage Worksheet 1: North Europe AmericaDocument1 pageVector Voyage Worksheet 1: North Europe AmericaJecel LazarraNo ratings yet
- 69 Mustang Wiring Diagram (Colorized)Document1 page69 Mustang Wiring Diagram (Colorized)1piotr1No ratings yet
- 2022-06-27 FY22 SGR Project ManualDocument259 pages2022-06-27 FY22 SGR Project ManualMuhammad SulemanNo ratings yet
- Installation Notice: All Right ReservedDocument46 pagesInstallation Notice: All Right ReservedPaul CollinsNo ratings yet
- 0.35 A Comparative Study On Effectiveness of Underpass and Overpass AmongDocument17 pages0.35 A Comparative Study On Effectiveness of Underpass and Overpass AmongrajjaNo ratings yet
- Dom LabDocument29 pagesDom LabrkNo ratings yet
- Attention Important Information: Vehicles For The Visteon Satellite Kits 4068597 (Generic) & 4068598 (MUX/DVD)Document73 pagesAttention Important Information: Vehicles For The Visteon Satellite Kits 4068597 (Generic) & 4068598 (MUX/DVD)Fermin AbadíaNo ratings yet
- CDM 863 PAYLOADERDocument1 pageCDM 863 PAYLOADERTnek Onairda100% (1)
- Chapter 4Document10 pagesChapter 4daphneNo ratings yet
- BAW680 EGLL-LTBA (25 Oct 2016) #1Document13 pagesBAW680 EGLL-LTBA (25 Oct 2016) #1ironI666No ratings yet
- SS Marine JumperDocument2 pagesSS Marine JumperKevin HockerNo ratings yet
- Inventory Management MaterialDocument18 pagesInventory Management Material719 Sowmiya. SNo ratings yet
- Installation and Operation Manual: VRV IV System Air ConditionerDocument36 pagesInstallation and Operation Manual: VRV IV System Air Conditionerelectrowat engineeringNo ratings yet
- K R - 35H-V R Ough T Errain Crane: (Power Jib)Document17 pagesK R - 35H-V R Ough T Errain Crane: (Power Jib)Testing GmailNo ratings yet
- Containers March 2011Document50 pagesContainers March 2011Parminder singh parmarNo ratings yet
- Comparing The Costs To Transport Liquids Using Pipelines, Truck and ShipsDocument4 pagesComparing The Costs To Transport Liquids Using Pipelines, Truck and ShipsPedro GelsonNo ratings yet
- TI - How - To - Check - Off-headingOff-course-alarm-1st-Rev3 - 2Document4 pagesTI - How - To - Check - Off-headingOff-course-alarm-1st-Rev3 - 2tengizNo ratings yet
- Week2 Quiz Revise STAB IIIDocument1 pageWeek2 Quiz Revise STAB IIIRosh AlraisiNo ratings yet
- DIY - Hicas Ball Joint Removal & Replacement - Gktech Hicas Lock Bar Install. - Tutorials - DIY - FAQ - SAU CommunityDocument17 pagesDIY - Hicas Ball Joint Removal & Replacement - Gktech Hicas Lock Bar Install. - Tutorials - DIY - FAQ - SAU CommunitynareNo ratings yet
- AC GST Tax InvoiceDocument1 pageAC GST Tax InvoiceMohan.vNo ratings yet
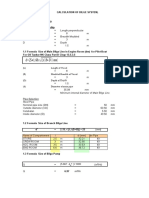
- D 25+1,68 X LX (B+D) (MM) : (L) Length of VesselDocument2 pagesD 25+1,68 X LX (B+D) (MM) : (L) Length of VesselAndika SatriyaNo ratings yet
- Flight International 21 - 04 - 2020Document36 pagesFlight International 21 - 04 - 2020V DNo ratings yet
- Graphical Inequalities 2 PDFDocument10 pagesGraphical Inequalities 2 PDFJo PatrickNo ratings yet
- BHEL Capital Budgeting ProjectDocument58 pagesBHEL Capital Budgeting ProjectRoyal Projects75% (12)
- Crash WorthinessDocument19 pagesCrash Worthinessrohit koraleNo ratings yet