You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5813)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- DELMIA V5R19 Course CatalogDocument40 pagesDELMIA V5R19 Course CatalogRavi ChaurasiaNo ratings yet
- Reporte Motores v1Document69 pagesReporte Motores v1Eduardo GuidoNo ratings yet
- Training - Cum - Employment OpportunitiesDocument2 pagesTraining - Cum - Employment OpportunitiestarakNo ratings yet
- Relief Valve (Swing) - Test and Adjust: SMCS - 5454-036Document4 pagesRelief Valve (Swing) - Test and Adjust: SMCS - 5454-036Steven Manuputty100% (1)
- 16 S 10 Standard Earthing Philosophy of GETCODocument4 pages16 S 10 Standard Earthing Philosophy of GETCOTheresa WestNo ratings yet
- 01 Fingerprint Sensing TechniquesDocument47 pages01 Fingerprint Sensing TechniquesNileshNemadeNo ratings yet
- Maxwell Cone Crusher S SeriesDocument2 pagesMaxwell Cone Crusher S SeriesCHIRAG PATELNo ratings yet
- STS-4 Press KitDocument78 pagesSTS-4 Press KitBob Andrepont100% (1)
- 1 5 11 PDFDocument3 pages1 5 11 PDFAfshaNo ratings yet
- Geared Exciter PDFDocument1 pageGeared Exciter PDFYousef AlipourNo ratings yet
- Thesis DocumentsDocument136 pagesThesis DocumentsAnonymous MmlU8v9QfTNo ratings yet
- 97F 53motorhomeDocument224 pages97F 53motorhomerukford1No ratings yet
- Operating Instructions and Installation of ONE2 Heat Pump HotjetDocument29 pagesOperating Instructions and Installation of ONE2 Heat Pump HotjetBogdan GaragauNo ratings yet
- Catalogo Bombas DAB KDocument9 pagesCatalogo Bombas DAB Kalberto_03No ratings yet
- Fire Protection System: For IKEA TebrauDocument35 pagesFire Protection System: For IKEA TebrauLee Sien100% (1)
- DSD Reply Letter - HBP1 Technical AuditDocument2 pagesDSD Reply Letter - HBP1 Technical AuditKa HoNo ratings yet
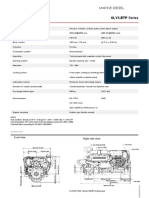
- 6LY3-ETP Series: Marine Diesel EnginesDocument4 pages6LY3-ETP Series: Marine Diesel EnginesJUNIOR OLIVONo ratings yet
- MicroProcessor MicroController LAB MANUAL MPMC Lab ManualDocument71 pagesMicroProcessor MicroController LAB MANUAL MPMC Lab ManualDossDossNo ratings yet
- Labour Output ConstantDocument14 pagesLabour Output ConstantJanesha100% (1)
- Steel Que BankDocument26 pagesSteel Que BankyawaleapurvastNo ratings yet
- Salvation by Peter F. Hamilton - 50 Page FridayDocument50 pagesSalvation by Peter F. Hamilton - 50 Page FridayRandom House Publishing Group50% (2)
- TheColumbianOrator 10052464Document301 pagesTheColumbianOrator 10052464Roberto TapiaNo ratings yet
- Vumii - Sensorii - User - Manual PDFDocument150 pagesVumii - Sensorii - User - Manual PDFHansel Manuel Torres EyssericNo ratings yet
- AN2085Document9 pagesAN2085ahseerhsgNo ratings yet
- Oster Classic Series Blender ManualDocument12 pagesOster Classic Series Blender ManualdigitaltextNo ratings yet
- Thermal Stresses in Hollow CylinderDocument20 pagesThermal Stresses in Hollow CylinderFernando DiezNo ratings yet
- Cyber Hunter InstallerDocument12 pagesCyber Hunter InstallerDaniel DantesNo ratings yet
- Precast Concrete Boxand Three Sided Culvert StructureDocument12 pagesPrecast Concrete Boxand Three Sided Culvert StructureHenry GutierrezNo ratings yet
- The LN ScaleDocument41 pagesThe LN ScaleRobert AdamsNo ratings yet
- Steel Making2Document147 pagesSteel Making2satish_trivediNo ratings yet