You might also like
- Total Range: Expand Your Efficiency HorizonsDocument40 pagesTotal Range: Expand Your Efficiency Horizonsmaaathan100% (1)
- Tax Invoice/Bill of Supply/Cash Memo: (Original For Recipient)Document1 pageTax Invoice/Bill of Supply/Cash Memo: (Original For Recipient)maaathanNo ratings yet
- Motion and Vectors ExamDocument9 pagesMotion and Vectors ExamClaudia PinnaNo ratings yet
- RAM Connection Verification ManualDocument85 pagesRAM Connection Verification ManualI'm LuongNo ratings yet
- NASA Astronautic Structural Manual Volume 2Document1,026 pagesNASA Astronautic Structural Manual Volume 2David Russo100% (1)
- Panama Canal Regulations PDFDocument107 pagesPanama Canal Regulations PDFmaaathanNo ratings yet
- ZC 40243 NATO Picatinny Rail Stanag4694Document1 pageZC 40243 NATO Picatinny Rail Stanag4694Ahmet GençNo ratings yet
- Thermal Storage - Steam AccumulatorsDocument6 pagesThermal Storage - Steam Accumulatorsbigsteve9088No ratings yet
- Barden Bearing Failures Us enDocument31 pagesBarden Bearing Failures Us encakendriNo ratings yet
- API 650 12th Edition 2013 PTDocument2 pagesAPI 650 12th Edition 2013 PTRonel John Rodriguez CustodioNo ratings yet
- Database Management Systems: Understanding and Applying Database TechnologyFrom EverandDatabase Management Systems: Understanding and Applying Database TechnologyRating: 4 out of 5 stars4/5 (8)
- Modification For New Panama Canal Transit PDFDocument1 pageModification For New Panama Canal Transit PDFmaaathanNo ratings yet
- Modification For New Panama Canal Transit PDFDocument1 pageModification For New Panama Canal Transit PDFmaaathanNo ratings yet
- Scoble - Measurement of Blast DamageDocument6 pagesScoble - Measurement of Blast DamageJotha WallNo ratings yet
- How To Calculate Turbine Heat RateDocument2 pagesHow To Calculate Turbine Heat RateGeorge AniborNo ratings yet
- Mot PDFDocument85 pagesMot PDFJorge OsorioNo ratings yet
- Chemicals Zetag DATA Beads Zetag 7583 - 0410Document2 pagesChemicals Zetag DATA Beads Zetag 7583 - 0410PromagEnviro.comNo ratings yet
- Setting Additives Influence On The Thermomechanical Properties of Wet Shotcrete Refractory Castable MatricesDocument6 pagesSetting Additives Influence On The Thermomechanical Properties of Wet Shotcrete Refractory Castable MatricesBagas Prasetyawan Adi NugrohoNo ratings yet
- High Resolution X-Ray Diffractometry and Topography 1998Document278 pagesHigh Resolution X-Ray Diffractometry and Topography 1998Tal PeerNo ratings yet
- Ejercitación 1Document4 pagesEjercitación 1NATALIA GORDILLO CONTRERASNo ratings yet
- WILO Yonos PARA RKA, RS 25-6Document2 pagesWILO Yonos PARA RKA, RS 25-6Mirela Paul100% (1)
- Itr-Mw 242Document1 pageItr-Mw 242Ramzi ZoghlamiNo ratings yet
- Itr-Mw 242Document1 pageItr-Mw 242Ramzi ZoghlamiNo ratings yet
- 07.modulo G - CimientosDocument1 page07.modulo G - CimientosISIDRO YANPIER BENITES GUERRERONo ratings yet
- S40148e 3Document85 pagesS40148e 3Claudio AlmiciNo ratings yet
- S40148C 3Document81 pagesS40148C 3Claudio AlmiciNo ratings yet
- Tsales 05Document4 pagesTsales 05thiago rykelveNo ratings yet
- SCW Only Tween 80 SDS Ctab SCW Only Tween 80 SDS Ctab: Temperature (Oc) Temperature (Oc)Document4 pagesSCW Only Tween 80 SDS Ctab SCW Only Tween 80 SDS Ctab: Temperature (Oc) Temperature (Oc)alifNo ratings yet
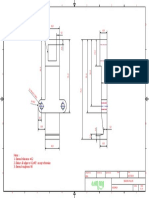
- Notes: 1. General Tolerance 0.2 2. Deburr All Edges To 0.2x45, Except Otherwise 3. General Roughness N8Document1 pageNotes: 1. General Tolerance 0.2 2. Deburr All Edges To 0.2x45, Except Otherwise 3. General Roughness N8faisal mujtamiNo ratings yet
- Estructuras Techo - Primera PlantaDocument1 pageEstructuras Techo - Primera PlantaKaterine Rocio Osores RiveraNo ratings yet
- Corte A-ADocument1 pageCorte A-ARocio Noemi MontalvoNo ratings yet
- Generation of Signals Aim:: All AllDocument5 pagesGeneration of Signals Aim:: All AllVishnu BalanNo ratings yet
- ChartsDocument58 pagesChartsSine EntertaimentNo ratings yet
- SHRPRO-V1 1120.13-A Shaft 1Document1 pageSHRPRO-V1 1120.13-A Shaft 1Wallace RobertoNo ratings yet
- Detaliu Grinda Fundare: E D C B A G G' FDocument1 pageDetaliu Grinda Fundare: E D C B A G G' Fdarhim2017No ratings yet
- WritingDocument3 pagesWritingDr. G. C. Vishnu Kumar Assistant Professor III - AERONo ratings yet
- Backup and Push Do BroDocument1 pageBackup and Push Do BroColNo ratings yet
- For What It's Worth V 3Document4 pagesFor What It's Worth V 3Reed MillerNo ratings yet
- Columna Tipica C-1 Columna Tipica C-2Document1 pageColumna Tipica C-1 Columna Tipica C-2drahcir123456789No ratings yet
- 2.abaco de Estabilidad para Cuñas Puramente Friccionantes (20°) PDFDocument1 page2.abaco de Estabilidad para Cuñas Puramente Friccionantes (20°) PDFMiguel Rivera ZetaNo ratings yet
- Aa - SS - Aa - LL 1Document1 pageAa - SS - Aa - LL 1Cesar NovilloNo ratings yet
- Py2aa CQ WW SSB 2006Document6 pagesPy2aa CQ WW SSB 2006Vitor Luis Aidar dos SantosNo ratings yet
- AE1110x 3c SlidesDocument11 pagesAE1110x 3c SlidesJB WeCaNcHANgeNo ratings yet
- PropuestaDocument4 pagesPropuestaArizoni Capaq de CuscoNo ratings yet
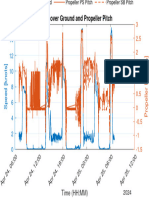
- Speed Over Ground and Propeller PitchDocument1 pageSpeed Over Ground and Propeller Pitchkunal.n.tiwariNo ratings yet
- Hasta Que Me OlvidesDocument1 pageHasta Que Me Olvidesmatiaszloto4118No ratings yet
- Swell Comp Position Pressure CombinedDocument1 pageSwell Comp Position Pressure Combinedkunal.n.tiwariNo ratings yet
- Earl Scruggs - Will The Circle Be UnbrokenDocument1 pageEarl Scruggs - Will The Circle Be UnbrokenJonathan BrunoNo ratings yet
- XL120RTFCBDocument1 pageXL120RTFCBBigPantsNo ratings yet
- CCDC Ubbm30 01Document4 pagesCCDC Ubbm30 01Luong LeNo ratings yet
- Cal I+d HCM01 Ple - V02Document2 pagesCal I+d HCM01 Ple - V02Janett Roselyn Cerna GarciaNo ratings yet
- 2.planta y CubiertaDocument1 page2.planta y CubiertaRosse's VillarroelNo ratings yet
- Tower 140 HHDocument2 pagesTower 140 HHBHIYA JINo ratings yet
- Crush - Beautiful (도깨비 OST)Document3 pagesCrush - Beautiful (도깨비 OST)Luke Isaiah S. ISMAELNo ratings yet
- لقطة شاشة 2023-10-07 في 5.40.07 مDocument4 pagesلقطة شاشة 2023-10-07 في 5.40.07 معبدالرحمن ابوالدهبNo ratings yet
- Assignment 6Document4 pagesAssignment 6Kimberly Meonada MagnayeNo ratings yet
- Canconeta by Bartolome CalatayudDocument1 pageCanconeta by Bartolome CalatayudErduandNo ratings yet
- DZI Dimesional DrawingDocument1 pageDZI Dimesional DrawingLý Chính ĐạoNo ratings yet
- You Created This PDF From An Application That Is Not Licensed To Print To Novapdf PrinterDocument1 pageYou Created This PDF From An Application That Is Not Licensed To Print To Novapdf PrinterEdward Sosa CoriNo ratings yet
- Screw PVC 4aDocument1 pageScrew PVC 4aEka imamullahNo ratings yet
- Orifice Plate With Carrier Ring Assembly PDFDocument1 pageOrifice Plate With Carrier Ring Assembly PDFaravindNo ratings yet
- Orifice Plate With Carrier Ring Assembly PDFDocument1 pageOrifice Plate With Carrier Ring Assembly PDFRajeev ChaudNo ratings yet
- Supplementary Figures: WT1 Ck7 WT1 Ck7Document21 pagesSupplementary Figures: WT1 Ck7 WT1 Ck7Valen EstevezNo ratings yet
- Curve Ncy Clop 09Document30 pagesCurve Ncy Clop 09smithap_ullalNo ratings yet
- Tab InsensatezDocument3 pagesTab InsensatezMichely CardosoNo ratings yet
- 01 电路图 强电电控箱的保险丝分布 PDFDocument13 pages01 电路图 强电电控箱的保险丝分布 PDF颜达广No ratings yet
- Etaj 1: Sala de ClasaDocument1 pageEtaj 1: Sala de ClasaMaria MateiNo ratings yet
- TP Cardboard Machine Spring (Long) Drawing v2Document1 pageTP Cardboard Machine Spring (Long) Drawing v2karthikNo ratings yet
- Calypso TRV-3 InstructionDocument2 pagesCalypso TRV-3 Instructionjimmy.hallberg.jhNo ratings yet
- Problem Projectile&Circular64Document2 pagesProblem Projectile&Circular64Sukon NgorsurachateNo ratings yet
- Construccion 2-Layout1Document1 pageConstruccion 2-Layout1Maria Celeste Ramirez HurtadoNo ratings yet
- Arrester TOV Simulator and Energy Dissipation CalculatorDocument10 pagesArrester TOV Simulator and Energy Dissipation CalculatorgilbertomjcNo ratings yet
- 1:1 4.013 1/1 A2 Base: Equipo 6Document1 page1:1 4.013 1/1 A2 Base: Equipo 6Rafa MartinezNo ratings yet
- 3 BenzDocument1 page3 BenzRay LatinoNo ratings yet
- Support MesinDocument1 pageSupport Mesinanon_666700113No ratings yet
- Plot SummaryDocument14 pagesPlot SummaryodimuthuNo ratings yet
- BWTS Sampling Procedure V1Document5 pagesBWTS Sampling Procedure V1maaathanNo ratings yet
- Hydro Marine Standard ItemsDocument9 pagesHydro Marine Standard ItemsmaaathanNo ratings yet
- Aalco Metals LTD - Aluminium Alloy DNV Certified Marine Extrusions Extrusions - 419Document3 pagesAalco Metals LTD - Aluminium Alloy DNV Certified Marine Extrusions Extrusions - 419maaathanNo ratings yet
- Bts - Ets - E210349 Plan Dsme2238 Bwts Retrofit (H.00123-E-113)Document2 pagesBts - Ets - E210349 Plan Dsme2238 Bwts Retrofit (H.00123-E-113)maaathanNo ratings yet
- RestrictedDocument7 pagesRestrictedmaaathanNo ratings yet
- RestrictedDocument5 pagesRestrictedmaaathanNo ratings yet
- Salvage Bags PDFDocument4 pagesSalvage Bags PDFmaaathanNo ratings yet
- Diving AccessoriesDocument18 pagesDiving AccessoriesmaaathanNo ratings yet
- 2020.06.11 - 15-25-181143 Corrigendum - 2Document7 pages2020.06.11 - 15-25-181143 Corrigendum - 2maaathanNo ratings yet
- Em Pmi375 T800 PDFDocument6 pagesEm Pmi375 T800 PDFmaaathanNo ratings yet
- HPV Hydrostatics Run2Document6 pagesHPV Hydrostatics Run2maaathanNo ratings yet
- Em Pmi375 T800 PDFDocument6 pagesEm Pmi375 T800 PDFmaaathanNo ratings yet
- United States Patent: Caro Et AlDocument13 pagesUnited States Patent: Caro Et AlmaaathanNo ratings yet
- Your Order Is Confirmed: #193190: Shipping ConfirmationDocument3 pagesYour Order Is Confirmed: #193190: Shipping ConfirmationmaaathanNo ratings yet
- Main Foundation Leg Will Clash With Fire Pump Valve RouteDocument1 pageMain Foundation Leg Will Clash With Fire Pump Valve RoutemaaathanNo ratings yet
- United States Patent: (12) (10) Patent No.: US 8,075,651 B2Document11 pagesUnited States Patent: (12) (10) Patent No.: US 8,075,651 B2maaathanNo ratings yet
- Order #139063 - Headphone Zone PDFDocument1 pageOrder #139063 - Headphone Zone PDFmaaathanNo ratings yet
- ArchimedesDocument5 pagesArchimedesvision100% (2)
- Euler Disk DynamicsDocument6 pagesEuler Disk DynamicsTanmay MathurNo ratings yet
- C V 5 - Earthquake Protection Devices ISOSISM Range - en v03Document24 pagesC V 5 - Earthquake Protection Devices ISOSISM Range - en v03Ilham HusseinNo ratings yet
- ER EPR Revisited: On The Entropy of An Einstein-Rosen BridgeDocument12 pagesER EPR Revisited: On The Entropy of An Einstein-Rosen BridgeKharanshuNo ratings yet
- Excavator Attachment Operation Manual - CompressedDocument13 pagesExcavator Attachment Operation Manual - CompressedRobin Sanchez100% (1)
- Experimental Correlation of Pool Boiling Heat Transfer For HFC134a On Enhanced Tubes Turbo EDocument8 pagesExperimental Correlation of Pool Boiling Heat Transfer For HFC134a On Enhanced Tubes Turbo EHany Elsawy AbdelrahmanNo ratings yet
- Load Combination Requirements in ASCE Standard 7-10: New DevelopmentsDocument7 pagesLoad Combination Requirements in ASCE Standard 7-10: New DevelopmentsAlekNo ratings yet
- GTU SyllabusDocument1 pageGTU Syllabusfly4rajNo ratings yet
- Untitled PresentationDocument10 pagesUntitled Presentationanurag singhNo ratings yet
- Filtration of Solid and Liquid Aerosol Mixtures: Pressure Drop Evolution and Influence of Solid/liquid RatioDocument3 pagesFiltration of Solid and Liquid Aerosol Mixtures: Pressure Drop Evolution and Influence of Solid/liquid RatiosafiraginaNo ratings yet
- Lecture#4 Strain MeasurementDocument5 pagesLecture#4 Strain MeasurementRenuga SubramaniamNo ratings yet
- Field Compaction ControlDocument2 pagesField Compaction ControlEftikarNo ratings yet
- Braggs Law Powerpoint PresentaDocument4 pagesBraggs Law Powerpoint PresentaNusra FaizNo ratings yet
- Bubble Point Calculation Using Goal SeekDocument1 pageBubble Point Calculation Using Goal SeekPranamNo ratings yet
- Compound Xi Kat101 C K Xi: Acetic Acid Methyl Acetate Iodomethane WaterDocument5 pagesCompound Xi Kat101 C K Xi: Acetic Acid Methyl Acetate Iodomethane WaterDương HoàngNo ratings yet
- H&H Compressor OilDocument2 pagesH&H Compressor Oilmister_no34No ratings yet
- инструкцияDocument60 pagesинструкцияVladimir100% (1)
- AFL Service Provider SolutionsDocument410 pagesAFL Service Provider Solutionsgirish_patkiNo ratings yet
- Taboada Jose NTNU Instruction ManualDocument53 pagesTaboada Jose NTNU Instruction ManualKarun NooneyNo ratings yet