You might also like
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- CMOS Logic StructuresDocument23 pagesCMOS Logic StructuressuprabhuNo ratings yet
- Basic Ccna Interview Questions and AnswersDocument4 pagesBasic Ccna Interview Questions and AnswersdevdasNo ratings yet
- Chapter4 Verilog SimulationDocument68 pagesChapter4 Verilog SimulationbigfatdashNo ratings yet
- Homework 4 Solution GuidelinesDocument12 pagesHomework 4 Solution GuidelinesSurya AhujaNo ratings yet
- Text To Speech ConversionDocument13 pagesText To Speech ConversionPrakhar Johari50% (2)
- Clock PowerDocument8 pagesClock PowerSathish BalaNo ratings yet
- Voltage ScalingDocument94 pagesVoltage Scalingvbharathi072100% (1)
- AWTG BenchmarkingDocument27 pagesAWTG BenchmarkingJayant VaishyaNo ratings yet
- How To Solve Setup & Hold Violations in The Design: PowerDocument20 pagesHow To Solve Setup & Hold Violations in The Design: PowerSujit Kumar100% (1)
- Equations and Impacts of Setup and Hold TimeDocument5 pagesEquations and Impacts of Setup and Hold TimeShravan Kumar AshannagariNo ratings yet
- DVD2 JNTU Set1 SolutionsDocument12 pagesDVD2 JNTU Set1 Solutionsకిరణ్ కుమార్ పగడాలNo ratings yet
- EEEE482 Lab7 Rev2 4Document12 pagesEEEE482 Lab7 Rev2 4coolliardNo ratings yet
- CompTIA Security+ Certification Training Course Outline - ONLCDocument7 pagesCompTIA Security+ Certification Training Course Outline - ONLCMuhammad0% (1)
- DFF Setup Hold ReviewDocument50 pagesDFF Setup Hold ReviewAkanksha221291No ratings yet
- Audi A4 3G+ MMI Entertainment SystemDocument6 pagesAudi A4 3G+ MMI Entertainment SystemJefUK100% (2)
- DFTDocument14 pagesDFTRahulNo ratings yet
- Sop - EceDocument2 pagesSop - Ecekrishnakk100No ratings yet
- Digital Design Interview QuestionsDocument25 pagesDigital Design Interview Questionsmanohar487No ratings yet
- STA FinalDocument66 pagesSTA FinalgauravkshriNo ratings yet
- AWS Solutions Architect Certification TrainingDocument13 pagesAWS Solutions Architect Certification TrainingAbdullaHanèèfaNo ratings yet
- TimingDocument15 pagesTimingSameer BadachiNo ratings yet
- Negative Skew For Setup: Propagation Delays Load Delays Interconnect DelaysDocument25 pagesNegative Skew For Setup: Propagation Delays Load Delays Interconnect DelaysRajni100% (1)
- 2016-04 DIAMETER ArchitectureDocument22 pages2016-04 DIAMETER ArchitectureVivek ShahNo ratings yet
- VLSI Design Interview Questions With AnswersDocument27 pagesVLSI Design Interview Questions With AnswersNitya SiddagangappaNo ratings yet
- Allplan 2015 Manual PDFDocument303 pagesAllplan 2015 Manual PDFAlbanNo ratings yet
- Tcu IntegrationDocument5 pagesTcu IntegrationSajid Saeed100% (9)
- QUALCOMM Interview Questions 1. Basic View of Compression?Document9 pagesQUALCOMM Interview Questions 1. Basic View of Compression?deepa100% (3)
- MIT6004 S 09 Tutor 06Document7 pagesMIT6004 S 09 Tutor 06Abhijith RanguduNo ratings yet
- Det FF PDFDocument5 pagesDet FF PDF09mitratNo ratings yet
- Setup and Hold Time BasicsDocument9 pagesSetup and Hold Time BasicsMahmoud MagdiNo ratings yet
- Metastability and SynchronizationDocument48 pagesMetastability and SynchronizationDollaRaiNo ratings yet
- Equations and Impacts of Setup and Hold Time: SkewDocument5 pagesEquations and Impacts of Setup and Hold Time: SkewVardhan KarnatiNo ratings yet
- Equations and Impacts of Setup and Hold TimeDocument5 pagesEquations and Impacts of Setup and Hold Timepavithra reddyNo ratings yet
- Lovely Professional University "Term Paper" ON " " (CSE-211)Document11 pagesLovely Professional University "Term Paper" ON " " (CSE-211)Sandeep KaurNo ratings yet
- RealDigital Module 8Document7 pagesRealDigital Module 8Sidney O. EbotNo ratings yet
- PAGE10Document4 pagesPAGE10praveenmorampudi42No ratings yet
- Sequential & Combinational Timing AnalysisDocument8 pagesSequential & Combinational Timing AnalysisSahil SharmaNo ratings yet
- Understanding Sequential Circuit TimingDocument8 pagesUnderstanding Sequential Circuit Timingchuku7No ratings yet
- Analysis and Optimization of Sequential Circuit Elements To Combat Single-Event Timing UpsetsDocument4 pagesAnalysis and Optimization of Sequential Circuit Elements To Combat Single-Event Timing UpsetsIlango KaruppasamyNo ratings yet
- Working of C MOS (Single Edge Triggered)Document4 pagesWorking of C MOS (Single Edge Triggered)Avinash BaldiNo ratings yet
- ClockGating CtsDocument8 pagesClockGating CtsSrikanth Reddy SarabudlaNo ratings yet
- Vlsi ReportDocument13 pagesVlsi ReportKadal ChaitraNo ratings yet
- Vlsi Final Notes Unit4Document21 pagesVlsi Final Notes Unit4RohitParjapatNo ratings yet
- Sequential Logic and Memory ComponentsDocument9 pagesSequential Logic and Memory ComponentsShashank MishraNo ratings yet
- Physical Realization of Logic GatesDocument4 pagesPhysical Realization of Logic GatesDebashish PalNo ratings yet
- Virtual Clock - Purpose and TimingDocument2 pagesVirtual Clock - Purpose and TimingvikasNo ratings yet
- Lecture 5: Physical Realisation of Logic Gates: DOC112: Computer Hardware Lecture 5 1Document4 pagesLecture 5: Physical Realisation of Logic Gates: DOC112: Computer Hardware Lecture 5 1Taqi Shah100% (1)
- Delay Calculation: - BY Venkata Surendra Amara (19555)Document36 pagesDelay Calculation: - BY Venkata Surendra Amara (19555)Venkata Surendra AmaraNo ratings yet
- Variable-Latency Adder (VL-Adder) : New Arithmetic Circuit Design Practice To Overcome NBTIDocument6 pagesVariable-Latency Adder (VL-Adder) : New Arithmetic Circuit Design Practice To Overcome NBTIRobin YadavNo ratings yet
- Power-Delay Efficient Overlap-Based Charge-Sharing Free Pseudo-Dynamic D Flip-FlopsDocument4 pagesPower-Delay Efficient Overlap-Based Charge-Sharing Free Pseudo-Dynamic D Flip-FlopsGopi PremalaNo ratings yet
- Timing DocumentationDocument14 pagesTiming DocumentationÆshok IncreĐible KingNo ratings yet
- Flip Flop PDFDocument5 pagesFlip Flop PDFarevazhagunvcNo ratings yet
- Race Hazards, Clock Skew, Cross Simulation & Intra-Assignment DelaysDocument4 pagesRace Hazards, Clock Skew, Cross Simulation & Intra-Assignment Delaysश्रेयस देशमुखNo ratings yet
- Design and Evaluation of Hysteresial Threshold Gate Based On Neuron MOSDocument5 pagesDesign and Evaluation of Hysteresial Threshold Gate Based On Neuron MOSMuthamil SelviNo ratings yet
- Iot Reference Model PDFDocument7 pagesIot Reference Model PDFKoush RastogiNo ratings yet
- Gated Clock Cloning For Timing Fixing 12 16Document19 pagesGated Clock Cloning For Timing Fixing 12 16Venkat Kiran SribhashyamNo ratings yet
- Ee6301 DLC Eee Iiist Au Unit IVDocument15 pagesEe6301 DLC Eee Iiist Au Unit IVNiharica SohalNo ratings yet
- Static Timing AnalysisDocument32 pagesStatic Timing AnalysisShantanu Sarkar100% (1)
- Synchronous Derived Clock and Synthesis of Low Power Sequential CircuitsDocument7 pagesSynchronous Derived Clock and Synthesis of Low Power Sequential CircuitsChaitanya ChavaNo ratings yet
- What Is MetastabilityDocument4 pagesWhat Is MetastabilityRakesh KumarNo ratings yet
- Design of A Crossbar VOQ Real-Time Switch With Clock-Driven Scheduling For A Guaranteed Delay BoundDocument19 pagesDesign of A Crossbar VOQ Real-Time Switch With Clock-Driven Scheduling For A Guaranteed Delay BoundmfhfhfNo ratings yet
- Stochastic Modelling and Its ApplicationsDocument30 pagesStochastic Modelling and Its ApplicationsMainak GhoshNo ratings yet
- Lect17 SeqDocument18 pagesLect17 SeqorengeneralNo ratings yet
- Clock Domain CrossingDocument5 pagesClock Domain CrossingRAGUL RAJ SNo ratings yet
- Clocking and Latches: Notes For EEC180B Spring 1999 University of California DavisDocument18 pagesClocking and Latches: Notes For EEC180B Spring 1999 University of California Davisrvs_093No ratings yet
- Chip Level Timing: ECE124 Digital Circuits and SystemsDocument18 pagesChip Level Timing: ECE124 Digital Circuits and SystemspdnoobNo ratings yet
- Performance 99Document7 pagesPerformance 99Tessla ArakalNo ratings yet
- Low Power Techniques For VLSI DesignDocument6 pagesLow Power Techniques For VLSI DesignjainatinNo ratings yet
- Clocks, Signals, and Delays: Figure 1 The Perfect Idealized ClockDocument5 pagesClocks, Signals, and Delays: Figure 1 The Perfect Idealized ClockRoshan RajuNo ratings yet
- WAN TECHNOLOGY FRAME-RELAY: An Expert's Handbook of Navigating Frame Relay NetworksFrom EverandWAN TECHNOLOGY FRAME-RELAY: An Expert's Handbook of Navigating Frame Relay NetworksNo ratings yet
- "The Emperor's New Mind": Computers, Minds, Mathematics and PhysicsDocument10 pages"The Emperor's New Mind": Computers, Minds, Mathematics and PhysicsbigfatdashNo ratings yet
- Dancing Shit OnDocument1 pageDancing Shit OnbigfatdashNo ratings yet
- Indeterminate Rusefodia RusepackaDocument1 pageIndeterminate Rusefodia RusepackabigfatdashNo ratings yet
- Tensor Calculus - Wikipedia, The Free EncyclopediaDocument1 pageTensor Calculus - Wikipedia, The Free EncyclopediabigfatdashNo ratings yet
- Gate Ece 1999 Paper SolutionsDocument16 pagesGate Ece 1999 Paper SolutionsbigfatdashNo ratings yet
- Min-Max Timing Analysis and An Application To Asynchronous CircuitsDocument13 pagesMin-Max Timing Analysis and An Application To Asynchronous CircuitsbigfatdashNo ratings yet
- 8 Bit Kogge Stone Adder - Final - ReportDocument8 pages8 Bit Kogge Stone Adder - Final - ReportbigfatdashNo ratings yet
- Multi-Cycle Implementation of MIPS: Revisit The 1-Cycle VersionDocument10 pagesMulti-Cycle Implementation of MIPS: Revisit The 1-Cycle VersionbigfatdashNo ratings yet
- Composer Schematic Capture: Dfii Design Framework IiDocument22 pagesComposer Schematic Capture: Dfii Design Framework IibigfatdashNo ratings yet
- Application Layer PDFDocument106 pagesApplication Layer PDFalolmani_oopNo ratings yet
- ASUS Windows 8.1 GuideDocument448 pagesASUS Windows 8.1 GuideNicolaescu GabrielNo ratings yet
- BSIT Nov Dec 2012 2nd CycleDocument59 pagesBSIT Nov Dec 2012 2nd CyclePiyush PriyankNo ratings yet
- How To Connect Two RoutersDocument7 pagesHow To Connect Two RoutersAdrianNo ratings yet
- Bixolon Thermal Mobile Printer Wireless PDFDocument2 pagesBixolon Thermal Mobile Printer Wireless PDFAnonymous WD109UakyNo ratings yet
- How To Replace The Default Oracle Logo With A Customized LogoDocument2 pagesHow To Replace The Default Oracle Logo With A Customized LogoimkhlaidNo ratings yet
- Manuel S. Enverga University Foundation: Logic Circuit & Switching Theory QuizDocument2 pagesManuel S. Enverga University Foundation: Logic Circuit & Switching Theory QuizApol MaañoNo ratings yet
- DataSnap in ActionDocument13 pagesDataSnap in ActionTauseeq ShahzadNo ratings yet
- TamTam BrochureDocument6 pagesTamTam BrochureBismark AgyeiNo ratings yet
- 1-Pngenalan Sis CellDocument23 pages1-Pngenalan Sis CellDeny SulisdyantoroNo ratings yet
- Omiga BattlecardDocument6 pagesOmiga BattlecardSalman AslamNo ratings yet
- PostScript Printer Description File Format SpecificationDocument240 pagesPostScript Printer Description File Format SpecificationAngsuman ChakrabortyNo ratings yet
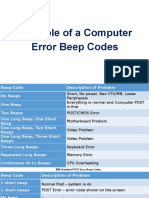
- Beep CodesDocument4 pagesBeep CodesJunNo ratings yet
- ask.com pptDocument43 pagesask.com pptNikhil ManjrekarNo ratings yet
- How To Stop C# Console Applications of Closing Automatically - Stack Overflow PDFDocument4 pagesHow To Stop C# Console Applications of Closing Automatically - Stack Overflow PDFNani LopesNo ratings yet
- Field Issues Avoid - EnhancementsDocument37 pagesField Issues Avoid - EnhancementsGolfur66No ratings yet
- YtsDocument2 pagesYtsVictor GuzmanNo ratings yet
- Códigos de TecladoDocument3 pagesCódigos de TecladosamuelsindraNo ratings yet
- Man Samsung WS-32Z348TDocument32 pagesMan Samsung WS-32Z348Tanon-632825No ratings yet
- Birla Institute of Technology, Mesra, Ranchi-835215 (India)Document5 pagesBirla Institute of Technology, Mesra, Ranchi-835215 (India)Sanam1378No ratings yet