Professional Documents
Culture Documents
Luna Sheet 2
Uploaded by
Clans ClansCopyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Luna Sheet 2
Uploaded by
Clans ClansCopyright:
Available Formats
U.S.
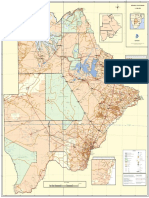
Department of the Interior Prepared for the Scientific Investigations Map 3316
U.S. Geological Survey National Aeronautics and Space Administration Sheet 2 of 2
180° 0°
55° –55°
Ro wland
21
0 °E 15
0°E MAP DESCRIPTION NOMENCLATURE 33
0°
E 30
°E
Clavius
60° This map is based on data from the Lunar Orbiter Laser Altimeter (LOLA; Smith and Names on this sheet are approved by the IAU. Only larger features shown. For a complete list –60°
others, 2010), an instrument on the National Aeronautics and Space Administration (NASA) of the IAU-approved nomenclature for the Moon, see the Gazetteer of Planetary Nomenclature at
Lunar Reconnaissance Orbiter (LRO) spacecraft (Tooley and others, 2010). The image used for http://planetarynames.wr.usgs.gov.
the base of this map represents more than 6.5 billion measurements gathered between July 2009
B i r k h o f f and July 2013, adjusted for consistency in the coordinate system described below, and then ACKNOWLEDGMENTS
Av o g a d r o converted to lunar radii (Mazarico and others, 2012). Elevations were computed by subtracting
This map was made possible with thanks to NASA, the LRO mission, and the LOLA team.
the lunar reference radius of 1737.4 kilometers (Lunar Reconnaissance Orbiter Project Lunar
The map was funded by NASA's Planetary Geology and Geophysics Cartography Program.
S o m m e r fe l d Geodesy and Cartography Working Group, 2008; Archinal and others, 2011) from the surface
radius measurements. Thus elevation values are the distance above or below the reference
sphere. The average accuracy of each point after crossover correction is better than 20 meters (m) REFERENCES
in horizontal position and ~1 m in radius (Mazarico and others, 2012). For the Mercator portion, Archinal, B.A. (Chair), A’Hearn, M.F., Bowell, E., Conrad, A., Consolmagno, G.J., Courtin, R.,
these measurements were converted into a digital elevation model (DEM; Neumann and others, Fukushima, T., Hestroffer, D., Hilton, J.L., Krasinsky, G.A., Neumann, G.A., Oberst, J.,
70° Gamo w 2011) using Generic Mapping Tools software (Wessel and Smith, 1998), with a resolution of Seidelmann, P.K., Stooke, P., Tholen, D.J., Thomas, P.C., and Williams, I.P., 2011, Report of –70°
0.015625 degrees per pixel, or 64 pixels per degree. In projection, the pixels are 473.8 m in size the IAU Working Group on cartographic coordinates and rotational elements—2009: Celestial
at the equator. Gaps between tracks of 1–2 km are common, and some gaps of as much as 4 km Mechanics and Dynamical Astronomy, v. 109, no. 2, p. 101–135, doi: 10.1007/s10569-010-
0°E
12
60
0°
occur near the equator. DEM points located in these gaps were filled by interpolation (Smith and 9320-4.
0°
°E
30
24
E
others, 2011). For the polar portion, the LOLA elevation points were used to create a DEM at Davies, M.E., and Colvin, T.R., 2000, Lunar coordinates in the regions of the Apollo landers:
240 meters per pixel. The high and low elevations noted on the map and listed on the scale bar Journal of Geophysical Research, v. 105, no. E8, p. 20,277–20,280.
are approximate.
Folkner, W.M., Williams, J.G., and Boggs, D.H., 2008, The planetary and lunar ephemeris DE 421:
Jet Propulsion Laboratory Memorandum IOM 343R-08-003, 31 p., at
PROJECTION
ftp://ssd.jpl.nasa.gov/pub/eph/planets/ioms/de421.iom.v1.pdf.
The Mercator projection is used between latitudes ±57°, with a central meridian at 0°
Folkner, W.M., Williams, J.G., and Boggs, D.H., 2009, The planetary and lunar ephemeris DE 421:
longitude and latitude equal to the nominal scale at 0°. The Polar Stereographic projection is used
Interplanetary Network Progress Report 42-178, 34 p., at
for the regions north of the +55° parallel and south of the –55° parallel with a central meridian
S c h w ar z s c h i l d http://ipnpr.jpl.nasa.gov/progress_report/42-178/178C.pdf. –80°
80° set for both at 0° and a latitude of true scale at +90° and -90° respectively. The adopted spherical
radius used to define the map scale is 1737.4 km (Lunar Reconnaissance Orbiter Project Lunar Lunar Reconnaissance Orbiter Project Lunar Geodesy and Cartography Working Group, 2008, A
B a i l l y
Co mpto n Geodesy and Cartography Working Group, 2008; Archinal and others, 2011). standardized lunar coordinate system for the Lunar Reconnaissance Orbiter and lunar datas-
ets: Lunar Reconnaissance Orbiter Project and Lunar Reconnaissance Orbiter Project Lunar
COORDINATE SYSTEM Geodesy and Cartography Working Group White Paper, v. 5, at
Po czo butt http://lunar.gsfc.nasa.gov/library/LunCoordWhitePaper-10-08.pdf.
The LOLA data were initially referenced to an internally consistent inertial coordinate
Ro z h d e s tv e n sk i y system, derived from tracking of the LRO spacecraft. By adopting appropriate values for the Mazarico, E., Rowlands, D.D., Neumann, G.A., Smith, D.E., Torrence, M.H., Lemoine, F.G., and
orientation of the Moon as defined by the International Astronomical Union (IAU; Archinal and Zuber, M.T., 2012, Orbit determination of the Lunar Reconnaissance Orbiter: Journal of
others, 2011), these inertial coordinates were converted into the planet-fixed coordinates Geodesy, v. 86, no. 3, p. 193–207.
(longitude and latitude) used on this map. The coordinate system defined for this product is the Neumann, G.A., 2011, Lunar Reconnaissance Orbiter Lunar Orbiter Laser Altimeter reduced data
mean Earth/polar axis (ME) system, sometimes called the mean Earth/rotation axis system. The record and derived products software interface specification, version 2.42, LRO-L-LOLA-4- Dry ga lski
Be l'ko v ich Ha use n
270°E 90°E ME system is the method most often used for cartographic products of the past (Davies and GDR-V1.0, NASA Planetary Data System (PDS), at 270°E 90°E
Bria ncho n Colvin, 2000). Values for the orientation of the Moon were derived from the Jet Propulsion http://imbrium.mit.edu/DOCUMENT/RDRSIS.PDF
Laboratory Developmental Ephemeris (DE) 421 planetary ephemeris (Williams and others, 2008; Smith, D.E., Zuber, M.T., Neumann, G.A., Lemoine, F.G., Mazarico, E., Torrence, M.H., McGarry,
Folkner and others, 2008; 2009) and rotated into the ME system. J.F., Rowlands, D.D., Head, J.W., III, Duxbury, T.H., Aharonson, O., Lucey, P.G., Robinson,
Longitude increases to the east and latitude is planetocentric as allowed in accordance with M.S., Barnouin, O.S., Cavanaugh, J.F., Sun, X., Liiva, P., Mao, D., Smith, J.C., and Bartels, Ashbroo k
Xenophane s current international and NASA standards (Lunar Reconnaissance Orbiter Project Lunar Geodesy A.E., 2010, Initial observations from the Lunar Orbiter Laser Altimeter (LOLA): Geophysical
MARE and Cartography Working Group, 2008; Archinal and others, 2011). The intersection of the lunar Research Letters, v. 37, no. L18204, doi:10.1029/2010GL043751. inge
r
röd
HUMBOLDTIANUM equator and prime meridian occurs at what can be called the Moon’s “mean sub-Earth point.” Sch
Smith, D.E., Zuber, M.T., Neumann, G.A., Mazarico, E., Head, J.W., III, Torrence, M.H., and the
The concept of a lunar “sub-Earth point” derives from the fact that the Moon’s rotation is tidally LOLA Science Team, 2011, Results from the Lunar Orbiter Laser Altimeter (LOLA)—global, Va l l
is
locked to the Earth. The actual sub-Earth point on the Moon varies slightly due to orbital high-resolution topographic mapping of the Moon [abs.]: Lunar Planetary Science Conference
eccentricity, inclination, and other factors, so a “mean sub-Earth point” is used to define the point XLII, Woodlands, Tex., Abstract 2350.
on the lunar surface where longitude equals 0°. This point does not coincide with any prominent
80° Tooley, C.R., Houghton, M.B., Saylor, R.S., Peddie, C., Everett, D.F., Baker, C.L., and Safdie, –80° Schrödinger
crater or other lunar surface feature (Lunar Reconnaissance Orbiter Project Lunar Geodesy and
K.N., 2010, Lunar Reconnaissance Orbiter mission and spacecraft design: Space Sciences Ze e man
Cartography Working Group, 2008; Archinal and others, 2011).
Review, v. 150, no. 1, p. 23–62, doi:10.1007/s11214-009-9624-4.
Py tha gora s
MAPPING TECHNIQUES Wessel, P., and Smith, W.H.F., 1998, New, improved version of Generic Mapping Tools released:
Eos, Transactions of the American Geophysical Union, v. 79, no. 47, p. 579.
To create the topographic base image, the original DEM that was produced by the LOLA
team in the Simple Cylindrical projection with a resolution of 64 pixels per degree, was projected Williams, J.G., Boggs, D.H., and Folkner, W.M., 2008, DE421 Lunar orbit, physical librations, and
Me ton surface coordinates: Jet Propulsion Laboratory Interoffice Memorandum IOM
into the Mercator and Polar Stereographic pieces. A shaded relief map was generated from each V
a
Ba bba ge 335-JW,DB,WF-20080314-001, at l l
DEM with a sun angle of 45° from horizontal and a sun azimuth of 270°, as measured clockwise i s
from north with no vertical exaggeration. The DEM values were then mapped to a global color ftp://ssd.jpl.nasa.gov/pub/eph/planets/ioms/de421_moon_coord_iom.pdf.
0°E
30
°E
24
look-up table, with each color representing a range of 1 km of elevation. These two files were P
0°E
l a
60
0°
12
lowest point n
then merged and scaled to 1:10,000,000 for the Mercator part, and 1:6,078,683 for the two Polar
E
+ c
k
70° Stereographic parts with a resolution of 300 pixels per inch. The two projections have a common –70°
Anto nia di
J. H e r s c h e l scale at ±56° latitude.
P l a n c k
W. B o n d
MA
RE
60° –60°
FR
33
0° IGO °E
21
0°E 0°E
E RIS 30 P o i n c a r é 15
55° –55°
0° ~ -9,130 Minimum ~ 10,780 Maximum 180°
SCALE 1:6 078 683 (1 mm = 6.078683 km) AT 90° LATITUDE SCALE 1:6 078 683 (1 mm = 6.078683 km) AT -90° LATITUDE
POLAR STEREOGRAPHIC PROJECTION POLAR STEREOGRAPHIC PROJECTION
–9000
–1000
5000
3000
–7000
1000
10000
7000
–5000
–3000
9000
1000 500 0 500 1000 KILOMETERS 1000 500 0 500 1000 KILOMETERS
90° 90° –90° –90°
70° 70° –70° –70°
55° 55° Elevation, in meters –55° –55°
NORTH POLAR REGION SOUTH POLAR REGION
North
180° 210°E 240°E 270°E 300°E 330°E 0° 30°E 60°E 90°E 120°E 150°E 180°
57° 57°
MARE
Birkhoff HUMBOLDTIANUM Co mpto n
MARE FRIGORIS
d'Ale mbe rt
SINUS RORIS
50° 50°
LACUS
SINUS
IRIDUM MORTIS
OC
EA
NU
MARE Ha rkhe bi
LACUS SOMNIORUM
S
L o r e n t z IMBRIUM
MARE
30° 30°
E
E NS
AR E
M OVI
SC
O
S E R E N I TAT IS M
MARE
PR
CRISIUM
OC
MARE
MARE
SINUS VAPORUM
MARGINIS
EL
AESTUUM MARE
LA
MARE
RU
TRANQUILLITATIS
+ highest point Me ndele e v
M
INS UL A RUM
H e r t z s p r u n g MARE
West
0° 0°
East
MARE
SMYTHII
Korolev
FECUNDITATIS
MARE
COGNITUM
MAR E
NECTARIS
MARE
ORIENTALE MARE
MARE
NUBIUM
HUMORUM
–30° –30°
MARE
INGENII
A p o l l o
MARE Le ibnitz
Schicka rd AUSTRALE
–50° –50°
P l a n c k P o i n c a r é
–57° –57°
180° 210°E 240°E 270°E 300°E 330°E 0° 30°E 60°E 90°E 120°E 150°E 180°
(150°W) (120°W) (90°W) (60°W) (30°W) South
Descriptions of nomenclature used on map are listed at SCALE 1:10 000 000 (1 mm = 10 km) AT 0˚ LATITUDE Prepared on behalf of the Planetary Geology and Geophysics Program,
http://planetarynames.wr.usgs.gov/ Solar System Exploration Division, Office of Space Science, National
MERCATOR PROJECTION
Aeronautics and Space Administration
2000 1000 500 0 500 1000 2000 KILOMETERS Edited by Kate Jacques; digital cartography by Vivian Nguyen
Manuscript approved for publication October 28, 2014
57° 57°
40° 40°
20° 20°
0° 0°
Topographic Map of the Moon
By Any use of trade, product, or firm names in this publication is for descriptive purposes only
and does not imply endorsement by the U.S. Government
Printed on recycled paper
Trent M. Hare,1 Rosalyn K. Hayward,1 Jennifer S. Blue,1 Brent A. Archinal,1 Mark S. Robinson,2 Emerson J. For sale by U.S. Geological Survey, Information Services, Box 25286, Federal Center,
Denver, CO 80225, 1–888–ASK–USGS
Digital files available at http://pubs.usgs.gov/sim/3316/
Speyerer,2 Robert V. Wagner,2 David E. Smith,3 Maria T. Zuber,3 Gregory A. Neumann,4 and Erwan Mazarico4 1
2
U.S. Geological Survey;
Arizona State University;
ISSN 2329-1311 (print)
Suggested citation: Hare, T.M., Hayward, R.K., Blue, J.S., Archinal, B.A., Robinson, M.S.,
Speyerer, E.J., Wagner, R.V., Smith, D.E., Zuber, M.T., Neumann, G.A., and Mazarico, E.,
3
Massachusetts Institute of Technology; 2015, Image mosaic and topographic map of the moon: U.S. Geological Survey Scientific
2015 4
NASA Goddard Space Flight Center
ISSN 2329-132X (online)
http://dx.doi.org/10.3133/sim3316 Investigations Map 3316, 2 sheets, http://dx.doi.org/10.3133/sim3316.
You might also like
- John RUTTER - Look at The World PDFDocument16 pagesJohn RUTTER - Look at The World PDFOscar Salgado RodriguezNo ratings yet
- 2012 Nautical AlmanacDocument136 pages2012 Nautical AlmanacRenato FonsecaNo ratings yet
- MEMORY - Barry ManilowDocument2 pagesMEMORY - Barry ManilowAlessandra MonteiroNo ratings yet
- Commonwealth High School Grade 10 Diagnostic Test focuses on plate tectonicsDocument3 pagesCommonwealth High School Grade 10 Diagnostic Test focuses on plate tectonicsAngela Elaine UrquiaNo ratings yet
- Sci 7 WorksheetsDocument4 pagesSci 7 WorksheetsAlea AguilarNo ratings yet
- Harta Azimutala Pe CampinaDocument1 pageHarta Azimutala Pe CampinaAnonymous XoW23y58ONo ratings yet
- Prevailing Wind: Left Center Right Color Code Gray Pink GrayDocument1 pagePrevailing Wind: Left Center Right Color Code Gray Pink GrayMary DenizeNo ratings yet
- Shop Drawing Daily Tank 10 Feb 2019-Bottom Plate (1.1)Document1 pageShop Drawing Daily Tank 10 Feb 2019-Bottom Plate (1.1)EnyNo ratings yet
- Azimuth Al MapDocument1 pageAzimuth Al MapTodd SpicerNo ratings yet
- Azimuthal Map Center: 90°0'0"N 0°0'0Document1 pageAzimuthal Map Center: 90°0'0"N 0°0'0vbugaianNo ratings yet
- Azimuthal MapDocument1 pageAzimuthal MapJorge MalucelliNo ratings yet
- Azimuthal map centered on 7°11'14"S 35°52'30Document1 pageAzimuthal map centered on 7°11'14"S 35°52'30Fetecra FeiraNo ratings yet
- AEP JakartaDocument1 pageAEP JakartaYosep BahtiarNo ratings yet
- Azimuthal MapDocument1 pageAzimuthal MapMihai BerarNo ratings yet
- Azimuthal Equidistant Map of The Flat EarthDocument1 pageAzimuthal Equidistant Map of The Flat Earthscuba776100% (3)
- Petroleum Exploration and Production Activities in South AfricaDocument1 pagePetroleum Exploration and Production Activities in South AfricaEthan van DiemenNo ratings yet
- Prevailing wind direction and intensity diagramDocument1 pagePrevailing wind direction and intensity diagramMary DenizeNo ratings yet
- Azimuthal Map of Southeast AsiaDocument1 pageAzimuthal Map of Southeast AsiaMike Parra CasasNo ratings yet
- SBXT Tma-Natal Arc 20231005Document1 pageSBXT Tma-Natal Arc 20231005Pedro AlbaniNo ratings yet
- Prevailing wind direction and key plan for structural analysisDocument3 pagesPrevailing wind direction and key plan for structural analysisMary DenizeNo ratings yet
- Azimuth Al MapDocument1 pageAzimuth Al MapPamela Catalán ContrerasNo ratings yet
- Azimuthal MapDocument1 pageAzimuthal MapMichaelRMilaniNo ratings yet
- General - Algeria AlgeriaDocument8 pagesGeneral - Algeria Algeriawaleed yehiaNo ratings yet
- Azimuthal Map: Center: 90°0'0"S 0°0'0"EDocument1 pageAzimuthal Map: Center: 90°0'0"S 0°0'0"EsikaNo ratings yet
- Drawings Jacket and MSFDocument6 pagesDrawings Jacket and MSFRajat Aryan SharmaNo ratings yet
- Mapa 01Document1 pageMapa 01Paulo E. GaldiniNo ratings yet
- Azimuthal MapDocument1 pageAzimuthal MapPy4ME Marcos R. SilvaNo ratings yet
- Moon GlobeDocument1 pageMoon GlobekvdangeloNo ratings yet
- AzimuthalMapDocument1 pageAzimuthalMapdominique.bellayNo ratings yet
- AzimuthalMap PDFDocument1 pageAzimuthalMap PDFCarlos Hugo CastilloNo ratings yet
- Unit 6210Document1 pageUnit 6210Khairul IdhamNo ratings yet
- Plant layout and elevation planDocument1 pagePlant layout and elevation planAsrolNo ratings yet
- Ubicacion y Localizacion FinalDocument1 pageUbicacion y Localizacion FinalteffigsNo ratings yet
- (Verify Roof Solar Panel Design) (Verify Roof Solar Panel Design)Document1 page(Verify Roof Solar Panel Design) (Verify Roof Solar Panel Design)rachellenoto25No ratings yet
- For Construction: N 841.000 Drawing LimitDocument1 pageFor Construction: N 841.000 Drawing LimitHimal Nilanka RathnayakaNo ratings yet
- TS 010029 2021Document2 pagesTS 010029 2021SrajeshKNo ratings yet
- Ms DD E4810 Act DWG 0006 - Rev1Document1 pageMs DD E4810 Act DWG 0006 - Rev1cahyo hutomoNo ratings yet
- Details of Pfj001 Details of Rfj001: FP-003A FP-004A 1 1 5 5Document1 pageDetails of Pfj001 Details of Rfj001: FP-003A FP-004A 1 1 5 5amit bagchiNo ratings yet
- Dry MC Intosh 2020Document1 pageDry MC Intosh 2020inforumdocsNo ratings yet
- Ims 0320-01-IsriDocument1 pageIms 0320-01-IsriJorge RamirezNo ratings yet
- A 01 PDFDocument1 pageA 01 PDFBono ReyesNo ratings yet
- Caterpillar. 950GIIHydrauDocument2 pagesCaterpillar. 950GIIHydrauIvoo oo100% (1)
- Seismic Hazard Map - 2Document1 pageSeismic Hazard Map - 2Ing Peter CucchiNo ratings yet
- Dz01plan PDFDocument8 pagesDz01plan PDFnaval consulNo ratings yet
- Kitchen Equipment Plumbing Requirements: Service HallDocument1 pageKitchen Equipment Plumbing Requirements: Service HallMohammed AzharNo ratings yet
- 93754-Geological Map of SaskatchewanDocument1 page93754-Geological Map of SaskatchewangfidekNo ratings yet
- RussiaDocument1 pageRussiaAlexander Krivov100% (18)
- SS 0200a South Sudan Health Facilities A1 20120321Document1 pageSS 0200a South Sudan Health Facilities A1 20120321YenThiLeNo ratings yet
- Detail of Earthing Lug Detail-A Base Plate Detail (Bp-1)Document1 pageDetail of Earthing Lug Detail-A Base Plate Detail (Bp-1)saravqwertyNo ratings yet
- CNS Unsanctioned Discoveries Including Small Pools: LegendDocument1 pageCNS Unsanctioned Discoveries Including Small Pools: LegendOdonkor NicholasNo ratings yet
- Robertson Basins and Plays PosterDocument1 pageRobertson Basins and Plays PosterHerbert MohriNo ratings yet
- 3-ModelDocument1 page3-Modeljoselito navarroNo ratings yet
- 1million - Edition7 28 08 2013 FINAL PDFDocument1 page1million - Edition7 28 08 2013 FINAL PDFT Rex Terror MolebatsiNo ratings yet
- ExampleDigitalMap PDFDocument1 pageExampleDigitalMap PDFSEBASNo ratings yet
- 10 723711 4800000299 PCC Ict DRG 102403 - DWG - 05 PS06Document1 page10 723711 4800000299 PCC Ict DRG 102403 - DWG - 05 PS06Zeeshan YasinNo ratings yet
- 3 2 N Pdms X (Left) Navis Pdms X (Right) Navis E: Pt. Mcdermott IndonesiaDocument1 page3 2 N Pdms X (Left) Navis Pdms X (Right) Navis E: Pt. Mcdermott IndonesiaAmri RsylnaNo ratings yet
- Sim3319 Sheet7Document1 pageSim3319 Sheet7faris nauvalNo ratings yet
- Sim3319 Sheet9Document1 pageSim3319 Sheet9faris nauvalNo ratings yet
- Aerodrome Obstacle Chart - Icao Type BDocument2 pagesAerodrome Obstacle Chart - Icao Type BLoïc GIROUDNo ratings yet
- Indonesia WAAF Airspaces PDFDocument1 pageIndonesia WAAF Airspaces PDFMuhammad Adnan ArumpadatuNo ratings yet
- 4124 AA DC 21130I002S01 IS01 - CheckprintDocument1 page4124 AA DC 21130I002S01 IS01 - CheckprintamitNo ratings yet
- J3B-AM-05-D-41124-2 - RO Building. 05-SP-124Document2 pagesJ3B-AM-05-D-41124-2 - RO Building. 05-SP-124Nauman TahirNo ratings yet
- Map - Continental-Europe-2 500 000Document1 pageMap - Continental-Europe-2 500 000andresrasconzambranaNo ratings yet
- MODULE 1: Assessment (15 Points) Circle The Letter That Corresponds To You AnswerDocument2 pagesMODULE 1: Assessment (15 Points) Circle The Letter That Corresponds To You AnswerMark Bryan S. Ogay IINo ratings yet
- Grade 7 I EclipsesDocument79 pagesGrade 7 I EclipsesMarty PanganNo ratings yet
- The Sun Terrestrial Planets The Solar System EarthDocument6 pagesThe Sun Terrestrial Planets The Solar System EarthJackie DumaguitNo ratings yet
- 2023 Monthly CalendarDocument11 pages2023 Monthly CalendarJoe SqueelyNo ratings yet
- Security and Surveillance by SlidesgoDocument56 pagesSecurity and Surveillance by SlidesgoIkram MaulidinNo ratings yet
- Earth and Life Science Module 1 PDFDocument9 pagesEarth and Life Science Module 1 PDFMhario MaurerNo ratings yet
- Why We Have SeasonsDocument6 pagesWhy We Have SeasonsAmmar AlalawiNo ratings yet
- Mercu RY: Prepared By: Arries Joy Almanzor John Paulo Bustamante Gillian Erika Jarilla Mojecah Jean PluciosDocument25 pagesMercu RY: Prepared By: Arries Joy Almanzor John Paulo Bustamante Gillian Erika Jarilla Mojecah Jean PluciosShiela Mae RegualosNo ratings yet
- Nigerian Modern Art HistoryDocument65 pagesNigerian Modern Art HistoryTosin EniolaNo ratings yet
- Cassini-Huygens Mission Reveals Saturn's MysteriesDocument2 pagesCassini-Huygens Mission Reveals Saturn's MysteriesPramit GhoshNo ratings yet
- Earth's History and Geologic TimeDocument13 pagesEarth's History and Geologic TimedhonaNo ratings yet
- The Sun: Guide For ReadingDocument2 pagesThe Sun: Guide For ReadingTUSHAR BANGERANo ratings yet
- Layers of The AtmosphereDocument25 pagesLayers of The AtmosphereandreasNo ratings yet
- p11 AlkaloidDocument44 pagesp11 AlkaloidVivian Velly HananiNo ratings yet
- Progressed Lunar PhasesDocument34 pagesProgressed Lunar Phasesozanguner100% (1)
- Space - Planet Fact CardsDocument4 pagesSpace - Planet Fact CardsJames KeruNo ratings yet
- Heavenly BodiesDocument43 pagesHeavenly BodiesEliza FloresNo ratings yet
- Almanac 1991Document136 pagesAlmanac 1991Shoaib hossainNo ratings yet
- Science5 Q4 Mod5 Cyclical Pattern of TheMoonToTheLength of The Month v4Document19 pagesScience5 Q4 Mod5 Cyclical Pattern of TheMoonToTheLength of The Month v4Aiza ConchadaNo ratings yet
- Explore The Moon in Google EarthDocument4 pagesExplore The Moon in Google EarthmarianNo ratings yet
- Earth's 5 Atmosphere Layers in a BookletDocument2 pagesEarth's 5 Atmosphere Layers in a BookletRusherNo ratings yet
- Climate Change ExplainedDocument38 pagesClimate Change ExplainedNetanya Gwyneth Catubuan100% (1)
- Asteroid Impact Hypothesis for Dinosaur ExtinctionDocument5 pagesAsteroid Impact Hypothesis for Dinosaur ExtinctionNurul IzatiNo ratings yet
- Kawaii Robots Pitch DeckDocument53 pagesKawaii Robots Pitch DeckammyNo ratings yet
- Umbanda - Planetary HoursDocument5 pagesUmbanda - Planetary Hourskemet215No ratings yet