You might also like
- NX 9 for Beginners - Part 3 (Additional Features and Multibody Parts, Modifying Parts)From EverandNX 9 for Beginners - Part 3 (Additional Features and Multibody Parts, Modifying Parts)No ratings yet
- Tutorial 0 - Skew Plate: Physical Introduction To The ProblemDocument6 pagesTutorial 0 - Skew Plate: Physical Introduction To The Problemcen1510353No ratings yet
- STAAD Pro Tutorial - Lesson 02 - Simple Continuous Beam AnalysisDocument8 pagesSTAAD Pro Tutorial - Lesson 02 - Simple Continuous Beam AnalysisEBeeNo ratings yet
- NX 9 for Beginners - Part 2 (Extrude and Revolve Features, Placed Features, and Patterned Geometry)From EverandNX 9 for Beginners - Part 2 (Extrude and Revolve Features, Placed Features, and Patterned Geometry)No ratings yet
- BuildDocument32 pagesBuildapi-3857201No ratings yet
- Autodesk Inventor - It's All in The PresentationDocument10 pagesAutodesk Inventor - It's All in The PresentationNdianabasi UdonkangNo ratings yet
- Calculation of Flow and Morphological Change of River Bed in A Meandering ChannelDocument12 pagesCalculation of Flow and Morphological Change of River Bed in A Meandering Channeltri radinal saputraNo ratings yet
- U of A ANSYS Tutorials - Two Dimensional TrussDocument17 pagesU of A ANSYS Tutorials - Two Dimensional TrussNaxief IsmailNo ratings yet
- Working Model Tutorial: 1. InstallationDocument10 pagesWorking Model Tutorial: 1. InstallationfernandojNo ratings yet
- ME EN 3200 Working Model TutorialDocument10 pagesME EN 3200 Working Model Tutorialkhan shahrukhNo ratings yet
- Analysis of Trusses Using SAP2000Document20 pagesAnalysis of Trusses Using SAP2000ran71681No ratings yet
- CFAC Solidworks LearningDocument50 pagesCFAC Solidworks LearningJaneth AbadNo ratings yet
- Assignment 4: Character Animation and Simulation: CS 248 Winter 2017-2018 Due Date: Monday, 26 February by 6:30pmDocument3 pagesAssignment 4: Character Animation and Simulation: CS 248 Winter 2017-2018 Due Date: Monday, 26 February by 6:30pmclaudia tapiaNo ratings yet
- Catia Part07Document19 pagesCatia Part07Suresh RajagopalNo ratings yet
- TUT (Eng) SCIA21.1 - Integration MemberDocument11 pagesTUT (Eng) SCIA21.1 - Integration MemberFusyNo ratings yet
- Assembly Design by VidyaputraDocument18 pagesAssembly Design by VidyaputraPraveenraj PraveenrajNo ratings yet
- Experiment - 5: AIM-To Study Forward KinematicsDocument7 pagesExperiment - 5: AIM-To Study Forward Kinematicsvarunmonga90No ratings yet
- STAR-CCM+ User Guide Cyclone Separator TutorialDocument79 pagesSTAR-CCM+ User Guide Cyclone Separator TutorialHayderAlSamawiNo ratings yet
- Amanuel Temesgen Simulation and Modeling 2Document33 pagesAmanuel Temesgen Simulation and Modeling 2Yonael MezmureNo ratings yet
- Design Animation Guide-DikonversiDocument37 pagesDesign Animation Guide-Dikonversiindra adriansyahNo ratings yet
- Creo Mechanism For Pratice PDFDocument11 pagesCreo Mechanism For Pratice PDFVinothkumarNo ratings yet
- Animation GuideDocument37 pagesAnimation Guidehiren_mistry55No ratings yet
- Autodesk Inventor - Using Splines and SurfacesDocument20 pagesAutodesk Inventor - Using Splines and SurfacesNdianabasi UdonkangNo ratings yet
- It's All in The PresentationDocument14 pagesIt's All in The PresentationkaoblekstenaNo ratings yet
- Blender 3D Animations CartoonsDocument5 pagesBlender 3D Animations Cartoonsmaria100% (3)
- 04 - Initial Data Analysis - 2010Document9 pages04 - Initial Data Analysis - 2010Marcelo Saez100% (1)
- Handout 2946 MA2946-L PDFDocument24 pagesHandout 2946 MA2946-L PDFClaudio ColuccioNo ratings yet
- 4bar Veloc Wiper CMDocument22 pages4bar Veloc Wiper CMManik SinghNo ratings yet
- Patran Lesson01-301 Geo SatelliteDocument28 pagesPatran Lesson01-301 Geo SatellitellaadharNo ratings yet
- Rigid Surfaces in Ansys WorkbenchDocument5 pagesRigid Surfaces in Ansys WorkbenchburcakozkokNo ratings yet
- Mirror Animation System DocumentationDocument10 pagesMirror Animation System DocumentationTal ShabiNo ratings yet
- Tutorial 1.1a Thin Conventional ShellDocument5 pagesTutorial 1.1a Thin Conventional Shellalenio003No ratings yet
- Two Dimentional TrussDocument24 pagesTwo Dimentional TrussajmalNo ratings yet
- GraphWorX64 - Collision Detection in 3DDocument4 pagesGraphWorX64 - Collision Detection in 3DsudirmanpriyoNo ratings yet
- RISA 2D Truss AnalysisDocument161 pagesRISA 2D Truss AnalysisIam engineerNo ratings yet
- Dynamic Assembly Constraints: DownloadDocument5 pagesDynamic Assembly Constraints: DownloadNdianabasi UdonkangNo ratings yet
- SAP 2000 Beam Analysis ManualDocument9 pagesSAP 2000 Beam Analysis ManualNatchimuthu KannanNo ratings yet
- Human Pose EstimationDocument4 pagesHuman Pose EstimationPranshu SharmaNo ratings yet
- Bolt Pretension AnsysDocument2 pagesBolt Pretension Ansys001tabNo ratings yet
- DocumentationDocument1 pageDocumentationjpNo ratings yet
- ME 266 SOLID MECHANICS LAB VIRTUAL TENSILE TESTDocument9 pagesME 266 SOLID MECHANICS LAB VIRTUAL TENSILE TESTDeva RajNo ratings yet
- Lin Pro HelpDocument8 pagesLin Pro HelpjoeNo ratings yet
- Special Course Implementation of NURBS-Based Iso-Geometric Analysis (IGA)Document16 pagesSpecial Course Implementation of NURBS-Based Iso-Geometric Analysis (IGA)Antonio BenigniNo ratings yet
- Whitepaper Bolted ConnectionsDocument18 pagesWhitepaper Bolted ConnectionsdanaosajoNo ratings yet
- Concrete For StartersDocument38 pagesConcrete For StartersUmpahPah75No ratings yet
- Testdrive SeDocument214 pagesTestdrive Sevul1234No ratings yet
- Cylinder Flow Mesh CreationDocument10 pagesCylinder Flow Mesh CreationRadheshyam JuturuNo ratings yet
- Forward and Inverse Modeling of Gravity DataDocument14 pagesForward and Inverse Modeling of Gravity DataMuhamad Firdaus Al-HakimNo ratings yet
- 2 - Subframe and EngineDocument20 pages2 - Subframe and EngineminhnguyenvonhatNo ratings yet
- Introduction to Solid Motion Using COSMOSMotionDocument30 pagesIntroduction to Solid Motion Using COSMOSMotionPhan Dinh SyNo ratings yet
- Motion Tools MDS v2.0: Motiondesign - SchoolDocument5 pagesMotion Tools MDS v2.0: Motiondesign - SchoolshashankNo ratings yet
- ABAQUS simulation of rigid sphere impactDocument7 pagesABAQUS simulation of rigid sphere impactabhishek rajNo ratings yet
- 05 - Initial Data Analysis-Day 2Document10 pages05 - Initial Data Analysis-Day 2Thắng NguyễnNo ratings yet
- LUSAS HelpDocument5 pagesLUSAS HelpadaNo ratings yet
- 2016 FAQ Midas CivilDocument67 pages2016 FAQ Midas Civillamkinpark3373No ratings yet
- Intro To Fluent Tutorial Tutiafflen24Document18 pagesIntro To Fluent Tutorial Tutiafflen24Fausto LojaNo ratings yet
- 6.7 Creating Midsurfaces Before MeshingDocument29 pages6.7 Creating Midsurfaces Before Meshingjingyong123No ratings yet
- BASIC ANSA Geometry Cleanup and Shell Meshing TutorialDocument59 pagesBASIC ANSA Geometry Cleanup and Shell Meshing TutorialTiberiu Mircea Pamint0% (1)
- Aircraft Seating Design IndexDocument110 pagesAircraft Seating Design IndexShiva Shankar100% (2)
- Permas ContactDocument14 pagesPermas ContactvenkyNo ratings yet
- Static and Structural Analysis of CamshaftDocument4 pagesStatic and Structural Analysis of CamshaftvenkyNo ratings yet
- CamshaftDocument3 pagesCamshaftvenkyNo ratings yet
- Non Linear Transient Analysis of a Camshaft AssemblyDocument3 pagesNon Linear Transient Analysis of a Camshaft AssemblyvenkyNo ratings yet
- Kulwinder 800981015 PDFDocument95 pagesKulwinder 800981015 PDFvenkyNo ratings yet
- 30 Design of Welded JointsDocument8 pages30 Design of Welded JointsPRASAD326No ratings yet
- Bolted FlangeDocument3 pagesBolted FlangevenkyNo ratings yet
- Finite Element Analysis Notes and Question BankDocument375 pagesFinite Element Analysis Notes and Question Bankfgh fghfghfNo ratings yet
- Bolted Connections PDFDocument56 pagesBolted Connections PDFÃvēđÆñ ŤhåķųřNo ratings yet
- Fracture Mechanics-Book PDFDocument402 pagesFracture Mechanics-Book PDFAXEL RIVERANo ratings yet
- Amplitude - PhaseDocument6 pagesAmplitude - Phasemuhammad awaisNo ratings yet
- Basic Ultrasonic TrainingDocument42 pagesBasic Ultrasonic TrainingAzrul HanifNo ratings yet
- Tổng hợp tải trọng Summation phần mềm MIDASDocument8 pagesTổng hợp tải trọng Summation phần mềm MIDASAnonymous DNb6yWERfBNo ratings yet
- Materials QDocument41 pagesMaterials QEses SNo ratings yet
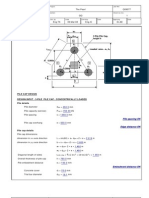
- Pile Cap Design 1Document6 pagesPile Cap Design 1kjpatel2100% (2)
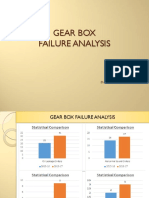
- Gear Box Failure AnalysisDocument39 pagesGear Box Failure AnalysisAli Hasnain100% (1)
- Acceleration QuizDocument2 pagesAcceleration QuizlinlinycNo ratings yet
- 180 TOP Concrete Technology & Design of Concrete SDocument49 pages180 TOP Concrete Technology & Design of Concrete SQaria shehzadiNo ratings yet
- © 2016 Pearson Education, LTDDocument48 pages© 2016 Pearson Education, LTDArvind KumarNo ratings yet
- Problem Set Strength of MaterialsDocument2 pagesProblem Set Strength of MaterialsRoku Dee13% (8)
- P1370 10S Unit 1 MotionDocument11 pagesP1370 10S Unit 1 Motiondevbones18No ratings yet
- Revised Profile Capacity-UpdateDocument2 pagesRevised Profile Capacity-UpdateRitwick BhattacharyaNo ratings yet
- Rotational Mechanics Course on Unacademy Free Learning PlatformDocument10 pagesRotational Mechanics Course on Unacademy Free Learning PlatformEkta ManglaniNo ratings yet
- 02-Lignos EtAl-11NCEE ATC PaperRev1Document12 pages02-Lignos EtAl-11NCEE ATC PaperRev1faisaladeNo ratings yet
- Principle of Operation of An AccelerometerDocument5 pagesPrinciple of Operation of An AccelerometersangeethsreeniNo ratings yet
- Concrete Shell Structures-Practice and Commentary: @seismicisolationDocument9 pagesConcrete Shell Structures-Practice and Commentary: @seismicisolationEnzo Llanos100% (1)
- Euler-Bernoulli Beam Theory - Simple English Wikipedia, The Free EncyclopediaDocument2 pagesEuler-Bernoulli Beam Theory - Simple English Wikipedia, The Free EncyclopediaCordy Jourvel Itoua-TseleNo ratings yet
- Introduction To Quantum Field Theory: Marina Von Steinkirch State University of New York at Stony Brook March 3, 2011Document121 pagesIntroduction To Quantum Field Theory: Marina Von Steinkirch State University of New York at Stony Brook March 3, 2011cifarha venantNo ratings yet
- Exact Solution For The Nonlinear PendulumDocument4 pagesExact Solution For The Nonlinear Pendulumlev501No ratings yet
- İç Kuvvet Diyagramları: Betonarme YapılarDocument46 pagesİç Kuvvet Diyagramları: Betonarme YapılarGafaöNo ratings yet
- Control of Closed-Loop Differential Drive Mobile Robot Using Forward and Reverse KinematicsDocument4 pagesControl of Closed-Loop Differential Drive Mobile Robot Using Forward and Reverse KinematicsElias GarcíaNo ratings yet
- Che201 Test-1Document4 pagesChe201 Test-1Fawziyyah AgboolaNo ratings yet
- 26-08-23 JR - Super60 Nucleus BT Jee-Main Wtm-06 Key & Sol'sDocument12 pages26-08-23 JR - Super60 Nucleus BT Jee-Main Wtm-06 Key & Sol'sSanthosh KasulavadhaNo ratings yet
- Appendix B Design Example Lifting LugDocument6 pagesAppendix B Design Example Lifting LugfernandoNo ratings yet
- Light PPT 120108205852 Phpapp01Document13 pagesLight PPT 120108205852 Phpapp01padmja4purohit100% (1)
- FLT Grade 11 Physics Chapter 2 and 3 UNIT, DIMENSION, Motion in A Straight Line SET 1Document3 pagesFLT Grade 11 Physics Chapter 2 and 3 UNIT, DIMENSION, Motion in A Straight Line SET 1FredrickNo ratings yet
- Dark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseFrom EverandDark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseRating: 3.5 out of 5 stars3.5/5 (69)
- The Physics of God: How the Deepest Theories of Science Explain Religion and How the Deepest Truths of Religion Explain ScienceFrom EverandThe Physics of God: How the Deepest Theories of Science Explain Religion and How the Deepest Truths of Religion Explain ScienceRating: 4.5 out of 5 stars4.5/5 (23)
- Strange Angel: The Otherworldly Life of Rocket Scientist John Whiteside ParsonsFrom EverandStrange Angel: The Otherworldly Life of Rocket Scientist John Whiteside ParsonsRating: 4 out of 5 stars4/5 (94)
- Summary and Interpretation of Reality TransurfingFrom EverandSummary and Interpretation of Reality TransurfingRating: 5 out of 5 stars5/5 (5)
- Quantum Spirituality: Science, Gnostic Mysticism, and Connecting with Source ConsciousnessFrom EverandQuantum Spirituality: Science, Gnostic Mysticism, and Connecting with Source ConsciousnessRating: 4 out of 5 stars4/5 (6)
- The Tao of Physics: An Exploration of the Parallels between Modern Physics and Eastern MysticismFrom EverandThe Tao of Physics: An Exploration of the Parallels between Modern Physics and Eastern MysticismRating: 4 out of 5 stars4/5 (500)
- Lost in Math: How Beauty Leads Physics AstrayFrom EverandLost in Math: How Beauty Leads Physics AstrayRating: 4.5 out of 5 stars4.5/5 (125)
- Packing for Mars: The Curious Science of Life in the VoidFrom EverandPacking for Mars: The Curious Science of Life in the VoidRating: 4 out of 5 stars4/5 (1395)
- Midnight in Chernobyl: The Story of the World's Greatest Nuclear DisasterFrom EverandMidnight in Chernobyl: The Story of the World's Greatest Nuclear DisasterRating: 4.5 out of 5 stars4.5/5 (409)
- A Brief History of Time: From the Big Bang to Black HolesFrom EverandA Brief History of Time: From the Big Bang to Black HolesRating: 4 out of 5 stars4/5 (2193)
- Quantum Physics for Beginners Who Flunked Math And Science: Quantum Mechanics And Physics Made Easy Guide In Plain Simple EnglishFrom EverandQuantum Physics for Beginners Who Flunked Math And Science: Quantum Mechanics And Physics Made Easy Guide In Plain Simple EnglishRating: 4.5 out of 5 stars4.5/5 (18)
- Quantum Physics: What Everyone Needs to KnowFrom EverandQuantum Physics: What Everyone Needs to KnowRating: 4.5 out of 5 stars4.5/5 (48)
- The Magick of Physics: Uncovering the Fantastical Phenomena in Everyday LifeFrom EverandThe Magick of Physics: Uncovering the Fantastical Phenomena in Everyday LifeNo ratings yet
- The End of Everything: (Astrophysically Speaking)From EverandThe End of Everything: (Astrophysically Speaking)Rating: 4.5 out of 5 stars4.5/5 (155)
- Black Holes: The Key to Understanding the UniverseFrom EverandBlack Holes: The Key to Understanding the UniverseRating: 4.5 out of 5 stars4.5/5 (13)
- Too Big for a Single Mind: How the Greatest Generation of Physicists Uncovered the Quantum WorldFrom EverandToo Big for a Single Mind: How the Greatest Generation of Physicists Uncovered the Quantum WorldRating: 4.5 out of 5 stars4.5/5 (8)
- Infinite Powers: How Calculus Reveals the Secrets of the UniverseFrom EverandInfinite Powers: How Calculus Reveals the Secrets of the UniverseRating: 4.5 out of 5 stars4.5/5 (126)
- Bedeviled: A Shadow History of Demons in ScienceFrom EverandBedeviled: A Shadow History of Demons in ScienceRating: 5 out of 5 stars5/5 (5)
- In Search of Schrödinger’s Cat: Quantum Physics and RealityFrom EverandIn Search of Schrödinger’s Cat: Quantum Physics and RealityRating: 4 out of 5 stars4/5 (380)
- Philosophy of Physics: A Very Short IntroductionFrom EverandPhilosophy of Physics: A Very Short IntroductionRating: 4.5 out of 5 stars4.5/5 (12)
- Starry Messenger: Cosmic Perspectives on CivilizationFrom EverandStarry Messenger: Cosmic Perspectives on CivilizationRating: 4.5 out of 5 stars4.5/5 (158)
- Professor Maxwell's Duplicitous Demon: The Life and Science of James Clerk MaxwellFrom EverandProfessor Maxwell's Duplicitous Demon: The Life and Science of James Clerk MaxwellRating: 4.5 out of 5 stars4.5/5 (20)
- The Holographic Universe: The Revolutionary Theory of RealityFrom EverandThe Holographic Universe: The Revolutionary Theory of RealityRating: 4.5 out of 5 stars4.5/5 (75)