You might also like
- Control Systems Stability AnalysisDocument66 pagesControl Systems Stability AnalysisLiying ChewNo ratings yet
- NMB 34203 Control Systems: System Stability: The Routh-Hurwitz CriterionDocument37 pagesNMB 34203 Control Systems: System Stability: The Routh-Hurwitz CriterionfatinNo ratings yet
- Chapter 7 - StabilityDocument42 pagesChapter 7 - Stabilityvenosyah devanNo ratings yet
- Chapter 5 - System StabilityDocument27 pagesChapter 5 - System StabilityANDREW LEONG CHUN TATT STUDENTNo ratings yet
- Stability Routh CriteriaDocument8 pagesStability Routh Criteriavk2you009No ratings yet
- 11 StabilityDocument32 pages11 StabilityLufrenzNo ratings yet
- 6 Module 6 Routh Hurwitz CriterionDocument30 pages6 Module 6 Routh Hurwitz CriterionJyotirmayee Panda100% (1)
- Control Systems Engineering: StabilityDocument30 pagesControl Systems Engineering: StabilityEren ÖzataNo ratings yet
- Lab 08 PDFDocument10 pagesLab 08 PDFAbdul Rehman AfzalNo ratings yet
- Lcs 9Document5 pagesLcs 9MianNo ratings yet
- Control Engineering MT-353: StabilityDocument47 pagesControl Engineering MT-353: StabilityTahaKhanNo ratings yet
- Lecture 14 StabilityDocument26 pagesLecture 14 StabilityHamza KhanNo ratings yet
- Chapter 6 System StabilityDocument32 pagesChapter 6 System StabilityIzzat AiresNo ratings yet
- Experiment No 1 Analysis of Control System ParametersDocument6 pagesExperiment No 1 Analysis of Control System Parameterspratik KumarNo ratings yet
- Regulation and Control: by Tewedage SileshiDocument22 pagesRegulation and Control: by Tewedage SileshihermelaNo ratings yet
- Stability Analysis Using Routh-Hurwitz CriterionDocument34 pagesStability Analysis Using Routh-Hurwitz CriterionNina ButtNo ratings yet
- Stability of Linear Control System: Bounded-Input Bounded-Output (BIBO) StabilityDocument9 pagesStability of Linear Control System: Bounded-Input Bounded-Output (BIBO) Stabilitymeseret sisayNo ratings yet
- Chapter 6Document20 pagesChapter 6Duncan KingNo ratings yet
- Nyquist Stability Criterion for Minimum Phase SystemsDocument8 pagesNyquist Stability Criterion for Minimum Phase SystemsÄâmïř ÌřşhądNo ratings yet
- Lecture 14, 15 StabilityDocument45 pagesLecture 14, 15 StabilityHamza KhanNo ratings yet
- Lecture 4Document19 pagesLecture 4Houssam moussaNo ratings yet
- Determine System Stability Using Routh-Hurwitz CriterionDocument28 pagesDetermine System Stability Using Routh-Hurwitz CriterionDaniel MengeshaNo ratings yet
- Stability Analysis MATLABDocument10 pagesStability Analysis MATLABSohail Afridi100% (1)
- CS II Lab Manual 5Document5 pagesCS II Lab Manual 5Ibtsaam ElahiNo ratings yet
- Cs 8343 Stability Concept AnalysisDocument59 pagesCs 8343 Stability Concept AnalysisCrescent MnyamaNo ratings yet
- Chapter 6Document19 pagesChapter 6hari17101991No ratings yet
- What Is Stability?: Stability Analysis in S-DomainDocument19 pagesWhat Is Stability?: Stability Analysis in S-DomainChetan GhatageNo ratings yet
- Stability: Dr. Issam ELGMATIDocument27 pagesStability: Dr. Issam ELGMATI7moud alajlaniNo ratings yet
- Ruth Herwitz Stability CriterionDocument24 pagesRuth Herwitz Stability Criterionpratik KumarNo ratings yet
- Chapter 6 - : The Stability of Linear Feedback SystemsDocument19 pagesChapter 6 - : The Stability of Linear Feedback SystemsNikhil V NainoorNo ratings yet
- Assessing Stability of Feedback SystemsDocument19 pagesAssessing Stability of Feedback SystemsDerrick Maatla MoadiNo ratings yet
- Stabilty Routh HurwitzDocument33 pagesStabilty Routh HurwitzAhmad SherNo ratings yet
- BCS Module Leader ContactDocument34 pagesBCS Module Leader ContactJpradha KamalNo ratings yet
- Stability: Sistem Pengendalian Otomatik Departemen Teknik Fisika Ftirs - ItsDocument32 pagesStability: Sistem Pengendalian Otomatik Departemen Teknik Fisika Ftirs - ItsUliya Rifda HanifaNo ratings yet
- STABILITY ANALYSISDocument30 pagesSTABILITY ANALYSISSumeyye AstalNo ratings yet
- Control Systems (CS) : Lecture-17 Routh-Herwitz Stability CriterionDocument18 pagesControl Systems (CS) : Lecture-17 Routh-Herwitz Stability CriterionAdil KhanNo ratings yet
- Stabilty Routh HurwitzDocument57 pagesStabilty Routh Hurwitzjinto0007No ratings yet
- Control Systems (CS) : Lecture-17 Routh-Herwitz Stability CriterionDocument30 pagesControl Systems (CS) : Lecture-17 Routh-Herwitz Stability CriterionKiranKumarNo ratings yet
- Week 6 - Stability of Linear Control Systems - PDFDocument45 pagesWeek 6 - Stability of Linear Control Systems - PDFgigoNo ratings yet
- Ruth Herwitz Stability CriterionDocument22 pagesRuth Herwitz Stability CriterionMD MUSFIQUR RAHMANNo ratings yet
- 2 - Stability of Linear Control SystemsDocument34 pages2 - Stability of Linear Control SystemsHassan El SayedNo ratings yet
- Laplace TTDocument56 pagesLaplace TTFares AlghamdiNo ratings yet
- 6 Stability Routh Hurwitz BasicDocument2 pages6 Stability Routh Hurwitz BasicathenalavegaNo ratings yet
- 0 7 Lec7 EE418 Routh - Herwitz - Stability - CriterionDocument58 pages0 7 Lec7 EE418 Routh - Herwitz - Stability - Criterionyoussef hossamNo ratings yet
- Routh-Hurwitz Stability Criterion ExplainedDocument24 pagesRouth-Hurwitz Stability Criterion ExplainedRajNo ratings yet
- Stability in Control SystemsDocument20 pagesStability in Control Systemssamir100% (1)
- Lecture Ruth Herwitz Stability CriterionDocument22 pagesLecture Ruth Herwitz Stability CriterionIslam SaqrNo ratings yet
- Routh-Hurwtz Criterion & Root-Locus Criteria: Stability of Feedback Control SystemsDocument19 pagesRouth-Hurwtz Criterion & Root-Locus Criteria: Stability of Feedback Control Systemsember_memoriesNo ratings yet
- Routh HurwitzDocument14 pagesRouth HurwitzVipul SinghalNo ratings yet
- Parta Roth Herwitz Stability CriterionDocument28 pagesParta Roth Herwitz Stability CriterionVeena Divya KrishnappaNo ratings yet
- Routh-Hurwitz Stability CriterionDocument30 pagesRouth-Hurwitz Stability CriterionKiranKumarNo ratings yet
- StabilityDocument20 pagesStabilityravalNo ratings yet
- Chapter 6 - StabilityDocument19 pagesChapter 6 - StabilityDL ArtsNo ratings yet
- Chapter 4 Elements of Realizability TheoryDocument37 pagesChapter 4 Elements of Realizability TheoryEndeshaw KebedeNo ratings yet
- Routh-Hurwitz Stability Criterion Explained (40Document29 pagesRouth-Hurwitz Stability Criterion Explained (40Kamran TariqNo ratings yet
- Control Systems (CS) : Lecture-7 Routh-Herwitz Stability CriterionDocument35 pagesControl Systems (CS) : Lecture-7 Routh-Herwitz Stability CriterionAhmed JamalNo ratings yet
- Transient & Steady State Response AnalysisDocument32 pagesTransient & Steady State Response AnalysisMisbah Sajid ChaudhryNo ratings yet
- Routh Hurwitz Stability Criteria - GATE Study Material in PDFDocument7 pagesRouth Hurwitz Stability Criteria - GATE Study Material in PDFPraveen AgrawalNo ratings yet
- Factorization of Boundary Value Problems Using the Invariant Embedding MethodFrom EverandFactorization of Boundary Value Problems Using the Invariant Embedding MethodNo ratings yet
- 1 + 1 = 1 An Introduction to Boolean Algebra and Switching CircuitsFrom Everand1 + 1 = 1 An Introduction to Boolean Algebra and Switching CircuitsRating: 4 out of 5 stars4/5 (2)
- Studi Eksperimental Pengaruh Temperatur ItsDocument2 pagesStudi Eksperimental Pengaruh Temperatur ItsMuhammad Irvan FNo ratings yet
- JADWAL PACK PTA1819terbaruDocument14 pagesJADWAL PACK PTA1819terbaruMuhammad Irvan FNo ratings yet
- Bucket elevator chains and components guideDocument45 pagesBucket elevator chains and components guideMuhammad Irvan FNo ratings yet
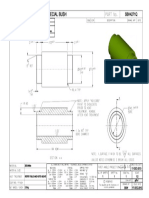
- DWG Bush Chain BT PDFDocument1 pageDWG Bush Chain BT PDFMuhammad Irvan FNo ratings yet
- Call Log ReportDocument44 pagesCall Log ReportHun JhayNo ratings yet
- MDP Module 2Document84 pagesMDP Module 2ADITYA RAJ CHOUDHARYNo ratings yet
- Sheet 5 SolvedDocument4 pagesSheet 5 Solvedshimaa eldakhakhnyNo ratings yet
- Spru I 11444Document24 pagesSpru I 11444aalvarcaNo ratings yet
- Chapter 5Document31 pagesChapter 5Marvin VinasNo ratings yet
- The Reading Process PDFDocument1 pageThe Reading Process PDFAdy OliveiraNo ratings yet
- BrochureDocument2 pagesBrochureNarayanaNo ratings yet
- Node - Js 8 The Right Way: Extracted FromDocument11 pagesNode - Js 8 The Right Way: Extracted FromRodrigo Románovich FiodorovichNo ratings yet
- Sophiajurgens Resume EdtDocument2 pagesSophiajurgens Resume Edtapi-506489381No ratings yet
- Customer: Id Email Password Name Street1 Street2 City State Zip Country Phone TempkeyDocument37 pagesCustomer: Id Email Password Name Street1 Street2 City State Zip Country Phone TempkeyAgus ChandraNo ratings yet
- Partlist Sym Vf3i 185Document83 pagesPartlist Sym Vf3i 185Jack Wilder100% (1)
- Achmad Nurdianto, S.PD: About MeDocument2 pagesAchmad Nurdianto, S.PD: About Medidon knowrezNo ratings yet
- Talento 371/372 Pro Talento 751/752 Pro: Installation and MountingDocument1 pageTalento 371/372 Pro Talento 751/752 Pro: Installation and MountingFareeha IrfanNo ratings yet
- Brain Size Evolution: How Fish Pay For Being Smart: Dispatch R63Document3 pagesBrain Size Evolution: How Fish Pay For Being Smart: Dispatch R63Nika AbashidzeNo ratings yet
- Technical Report Writing For Ca2 ExaminationDocument6 pagesTechnical Report Writing For Ca2 ExaminationAishee DuttaNo ratings yet
- Power Transformer Fundamentals: CourseDocument5 pagesPower Transformer Fundamentals: CoursemhNo ratings yet
- Switches Demystified Assembly PDFDocument1 pageSwitches Demystified Assembly PDFkocekoNo ratings yet
- Universiti Teknologi Mara Odl Test 1: Confidential 1 EM/ MAY 2020/MEM603Document4 pagesUniversiti Teknologi Mara Odl Test 1: Confidential 1 EM/ MAY 2020/MEM603000No ratings yet
- Daily DAWN News Vocabulary With Urdu Meaning (05 April 2020) PDFDocument6 pagesDaily DAWN News Vocabulary With Urdu Meaning (05 April 2020) PDFAEO Begowala100% (2)
- COE10205, Other Corrosion Monitoring TechniquesDocument62 pagesCOE10205, Other Corrosion Monitoring Techniquesامين100% (1)
- SC Project Closeout Report v6Document27 pagesSC Project Closeout Report v6SateeshIngoleNo ratings yet
- Electrical Tools, Eq, Sup and MatDocument14 pagesElectrical Tools, Eq, Sup and MatXylene Lariosa-Labayan100% (2)
- Phrase Structure AnalysisDocument2 pagesPhrase Structure Analysismerlino99No ratings yet
- The Effective of Geothermal Energy in BuDocument8 pagesThe Effective of Geothermal Energy in BuMeziane YkhlefNo ratings yet
- BIGuidebook Templates - BI Logical Data Model - Data Integration DesignDocument12 pagesBIGuidebook Templates - BI Logical Data Model - Data Integration DesignShahina H CrowneNo ratings yet
- Economics Not An Evolutionary ScienceDocument17 pagesEconomics Not An Evolutionary SciencemariorossiNo ratings yet
- Piperack Design PhiloshipyDocument10 pagesPiperack Design PhiloshipyGautam PaulNo ratings yet
- Function Apollo Amadeus: Sign In/OutDocument16 pagesFunction Apollo Amadeus: Sign In/OutMabs GaddNo ratings yet
- C 60 A/XF: The Siam Refractory Industry Co.,LtdDocument1 pageC 60 A/XF: The Siam Refractory Industry Co.,LtdGaluhNo ratings yet
- Six Sigma Statistical Methods Using Minitab 13 Manual4754Document95 pagesSix Sigma Statistical Methods Using Minitab 13 Manual4754vinaytoshchoudharyNo ratings yet