You might also like
- Routh-Hurwitz Criterion: Name: Aamir Irshad Section:B SAB NO:70065601 REG NO:BSME-016-047 Assignment No:02Document8 pagesRouth-Hurwitz Criterion: Name: Aamir Irshad Section:B SAB NO:70065601 REG NO:BSME-016-047 Assignment No:02Äâmïř ÌřşhądNo ratings yet
- An Introduction to Linear Algebra and TensorsFrom EverandAn Introduction to Linear Algebra and TensorsRating: 1 out of 5 stars1/5 (1)
- Routh-Hurwitz CriteriaDocument7 pagesRouth-Hurwitz CriteriaRevathi KrishnanNo ratings yet
- Control Systems Theory: Transient Response Stability STB 35103Document68 pagesControl Systems Theory: Transient Response Stability STB 35103Muhammad Irvan FNo ratings yet
- Routh HurwitzDocument14 pagesRouth HurwitzVipul SinghalNo ratings yet
- 6 Module 6 Routh Hurwitz CriterionDocument30 pages6 Module 6 Routh Hurwitz CriterionJyotirmayee Panda100% (1)
- Lab 08 PDFDocument10 pagesLab 08 PDFAbdul Rehman AfzalNo ratings yet
- StabilityDocument66 pagesStabilityLiying ChewNo ratings yet
- Regulation and Control: by Tewedage SileshiDocument22 pagesRegulation and Control: by Tewedage SileshihermelaNo ratings yet
- Izmir University of Economics Eee 311 Laboratory Assignment IvDocument3 pagesIzmir University of Economics Eee 311 Laboratory Assignment IvPandimadevi GanesanNo ratings yet
- Lab Experiment 11Document10 pagesLab Experiment 11Sohail Afridi100% (1)
- CS II Lab Manual 5Document5 pagesCS II Lab Manual 5Ibtsaam ElahiNo ratings yet
- Chapter 6Document19 pagesChapter 6hari17101991No ratings yet
- Experiment No 1 Analysis of Control System ParametersDocument6 pagesExperiment No 1 Analysis of Control System Parameterspratik KumarNo ratings yet
- Chapter 7 - StabilityDocument42 pagesChapter 7 - Stabilityvenosyah devanNo ratings yet
- Stability Routh CriteriaDocument8 pagesStability Routh Criteriavk2you009No ratings yet
- Module-17 - Routh-Hurwitz Criterion: EE3101-Control Systems EngineeringDocument8 pagesModule-17 - Routh-Hurwitz Criterion: EE3101-Control Systems EngineeringhariNo ratings yet
- What Is Stability?: Stability Analysis in S-DomainDocument19 pagesWhat Is Stability?: Stability Analysis in S-DomainChetan GhatageNo ratings yet
- RH CriterionDocument2 pagesRH CriterionmailmadoNo ratings yet
- Chapter 5 - System StabilityDocument27 pagesChapter 5 - System StabilityANDREW LEONG CHUN TATT STUDENTNo ratings yet
- Ruth Herwitz Stability CriterionDocument22 pagesRuth Herwitz Stability CriterionMD MUSFIQUR RAHMANNo ratings yet
- StabilityDocument28 pagesStabilityDaniel MengeshaNo ratings yet
- Second Order 2Document30 pagesSecond Order 2rajneesh singhNo ratings yet
- Routh Hurwitz Stability Criteria - GATE Study Material in PDFDocument7 pagesRouth Hurwitz Stability Criteria - GATE Study Material in PDFPraveen AgrawalNo ratings yet
- Chapter 6 - : The Stability of Linear Feedback SystemsDocument19 pagesChapter 6 - : The Stability of Linear Feedback SystemsNikhil V NainoorNo ratings yet
- Lecture 7Document19 pagesLecture 7Derrick Maatla MoadiNo ratings yet
- Control System PracticalDocument19 pagesControl System PracticalYashNo ratings yet
- Routh-Hurwtz Criterion & Root-Locus Criteria: Stability of Feedback Control SystemsDocument19 pagesRouth-Hurwtz Criterion & Root-Locus Criteria: Stability of Feedback Control Systemsember_memoriesNo ratings yet
- Stability & Routh Hurwitz CriterionDocument5 pagesStability & Routh Hurwitz CriterionJawad SandhuNo ratings yet
- Control System PracticalDocument13 pagesControl System PracticalNITESH KumarNo ratings yet
- 11 StabilityDocument32 pages11 StabilityLufrenzNo ratings yet
- Stability of Linear Control System: Bounded-Input Bounded-Output (BIBO) StabilityDocument9 pagesStability of Linear Control System: Bounded-Input Bounded-Output (BIBO) Stabilitymeseret sisayNo ratings yet
- Stability of Linear Systems: DR K P Mohandas, Professor, NIT CalicutDocument7 pagesStability of Linear Systems: DR K P Mohandas, Professor, NIT Calicutsuresh1virdiNo ratings yet
- NMB 34203 Control Systems: System Stability: The Routh-Hurwitz CriterionDocument37 pagesNMB 34203 Control Systems: System Stability: The Routh-Hurwitz CriterionfatinNo ratings yet
- Stability: Term Paper - IPC Made by - Krishna Patel (18BCH045)Document28 pagesStability: Term Paper - IPC Made by - Krishna Patel (18BCH045)PATEL KRISHNANo ratings yet
- Control SystemDocument52 pagesControl SystemvijayNo ratings yet
- Chapter 4 Elements of Realizability TheoryDocument37 pagesChapter 4 Elements of Realizability TheoryEndeshaw KebedeNo ratings yet
- Con MCQDocument76 pagesCon MCQazeem sheikhNo ratings yet
- System StabilityDocument16 pagesSystem Stabilityeugeni madaNo ratings yet
- Stabilty Routh HurwitzDocument33 pagesStabilty Routh HurwitzAhmad SherNo ratings yet
- Control Systems (CS) : Lecture-17 Routh-Herwitz Stability CriterionDocument18 pagesControl Systems (CS) : Lecture-17 Routh-Herwitz Stability CriterionAdil KhanNo ratings yet
- Feedback Control Systems (FCS) : Lecture19-20 Routh-Herwitz Stability CriterionDocument24 pagesFeedback Control Systems (FCS) : Lecture19-20 Routh-Herwitz Stability CriterionRajNo ratings yet
- Control 05Document27 pagesControl 05أحمد تركي كحيوشNo ratings yet
- Experiment-4: Sabarivelan S 20BEI0059Document7 pagesExperiment-4: Sabarivelan S 20BEI0059sabarivelan sNo ratings yet
- MCQS (Control Engg.)Document166 pagesMCQS (Control Engg.)azeem sheikhNo ratings yet
- Ruth Herwitz Stability CriterionDocument24 pagesRuth Herwitz Stability Criterionpratik KumarNo ratings yet
- Cs 8343 Stability Concept AnalysisDocument59 pagesCs 8343 Stability Concept AnalysisCrescent MnyamaNo ratings yet
- Laplace TTDocument56 pagesLaplace TTFares AlghamdiNo ratings yet
- Control Systems Engineering: StabilityDocument30 pagesControl Systems Engineering: StabilityEren ÖzataNo ratings yet
- Lecture Ruth Herwitz Stability CriterionDocument22 pagesLecture Ruth Herwitz Stability CriterionIslam SaqrNo ratings yet
- Control Systems (CS) : Lecture-17 Routh-Herwitz Stability CriterionDocument30 pagesControl Systems (CS) : Lecture-17 Routh-Herwitz Stability CriterionKiranKumarNo ratings yet
- SME Official Layout Module+10Document20 pagesSME Official Layout Module+10JmbernabeNo ratings yet
- Lecture 4Document19 pagesLecture 4Houssam moussaNo ratings yet
- Chapter 6Document20 pagesChapter 6Duncan KingNo ratings yet
- Stability: Sistem Pengendalian Otomatik Departemen Teknik Fisika Ftirs - ItsDocument32 pagesStability: Sistem Pengendalian Otomatik Departemen Teknik Fisika Ftirs - ItsUliya Rifda HanifaNo ratings yet
- StabilityDocument10 pagesStabilityBUSHRA BATOOLNo ratings yet
- Control Engineering MT-353: StabilityDocument47 pagesControl Engineering MT-353: StabilityTahaKhanNo ratings yet
- Linear SystemsDocument9 pagesLinear SystemsAhmed M H Al-YousifNo ratings yet
- Chapter 6 System StabilityDocument32 pagesChapter 6 System StabilityIzzat AiresNo ratings yet
- Smart Menu and Automatic Ordering System.: 1 .Transmitter SectionDocument3 pagesSmart Menu and Automatic Ordering System.: 1 .Transmitter SectionMianNo ratings yet
- AC MotorsDocument19 pagesAC MotorsMianNo ratings yet
- Final YearDocument12 pagesFinal YearMianNo ratings yet
- Chapter No - 1Document16 pagesChapter No - 1MianNo ratings yet
- Lab Report No#10: ObjectivesDocument3 pagesLab Report No#10: ObjectivesMianNo ratings yet
- FR4 EpoxyDocument6 pagesFR4 EpoxyMianNo ratings yet
- Antenna Arrays Chapter No 5Document23 pagesAntenna Arrays Chapter No 5MianNo ratings yet
- Proposal 1Document8 pagesProposal 1MianNo ratings yet
- Literal EquationsDocument4 pagesLiteral Equationsapi-348347219No ratings yet
- Tut 202 Ass2 Sol PDFDocument16 pagesTut 202 Ass2 Sol PDFKhathutshelo KharivheNo ratings yet
- TUT 2 SolutionsDocument22 pagesTUT 2 SolutionsEE-19-66 SaqlainNo ratings yet
- 04 05 KomFis Gauss EliminationDocument85 pages04 05 KomFis Gauss EliminationalfianisaNo ratings yet
- Intro To ScilabDocument7 pagesIntro To Scilabchristine_straubNo ratings yet
- Commutative Algebra - BourbakiDocument324 pagesCommutative Algebra - Bourbakishd_strkh100% (4)
- Vector Mechanics by JohnsonDocument34 pagesVector Mechanics by JohnsonSushil AryanNo ratings yet
- R ConsoleDocument21 pagesR ConsoleBharath Krishna BezawadaNo ratings yet
- Algebra 2 TEKS From TEADocument9 pagesAlgebra 2 TEKS From TEAganesh8sundaresanNo ratings yet
- Lec# 8 (Higher Order DE)Document22 pagesLec# 8 (Higher Order DE)Faraz KashifNo ratings yet
- Multiplying and Factoring: AssignmentDocument3 pagesMultiplying and Factoring: AssignmentAaisha lakdawalaNo ratings yet
- Equations Transformable Into Quadratic Equations: Module in Mathematics 9Document24 pagesEquations Transformable Into Quadratic Equations: Module in Mathematics 9Dee En Martinez100% (1)
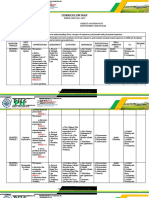
- Curriculum Map: Quarter: I Subject: Mathematics Grade Level: Grade 8 Department: Junior High Teacher: Epie S. MercaderDocument4 pagesCurriculum Map: Quarter: I Subject: Mathematics Grade Level: Grade 8 Department: Junior High Teacher: Epie S. MercaderLittle EpaiiNo ratings yet
- Advanced Mathematics - 2 July 2011Document2 pagesAdvanced Mathematics - 2 July 2011Prasad C MNo ratings yet
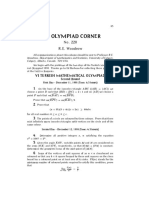
- THE OLYMPIAD CORNER - Canadian Mathematical Society (PDFDrive) PDFDocument64 pagesTHE OLYMPIAD CORNER - Canadian Mathematical Society (PDFDrive) PDFFustei BogdanNo ratings yet
- Section 1.1 Matrix Multiplication, Flop Counts and Block (Partitioned) MatricesDocument4 pagesSection 1.1 Matrix Multiplication, Flop Counts and Block (Partitioned) MatricesMococo CatNo ratings yet
- Sparse ArrayDocument2 pagesSparse ArrayzulkoNo ratings yet
- s.5 Submathematics End of Term 11 OriginalDocument3 pagess.5 Submathematics End of Term 11 OriginalNDYAMUSIIMA METHODIUSNo ratings yet
- Algorithm // Addition of Matrices: PseudocodeDocument4 pagesAlgorithm // Addition of Matrices: PseudocodeChiqui Elaine CabelaNo ratings yet
- CaseletsDocument11 pagesCaseletsapi-26456455No ratings yet
- Variables and Mathematical StatementsDocument5 pagesVariables and Mathematical StatementsJenica Mariel GabaisenNo ratings yet
- Year 6 Algebra AssignmentDocument3 pagesYear 6 Algebra AssignmentJoel OkohNo ratings yet
- Assignment 2 PRMODocument2 pagesAssignment 2 PRMOSubham Nag0% (1)
- WINSEM2020-21 MAT1014 TH VL2020210505929 Reference Material I 08-Apr-2021 1-Group Homomorphism Isomorphism and Related ExamplesDocument27 pagesWINSEM2020-21 MAT1014 TH VL2020210505929 Reference Material I 08-Apr-2021 1-Group Homomorphism Isomorphism and Related ExamplesMoulik AroraNo ratings yet
- Ma8151 Engg - Ineering Mathematics I MCQDocument120 pagesMa8151 Engg - Ineering Mathematics I MCQpriya dharshini80% (5)
- Lecture 3Document10 pagesLecture 3Hosam AlqNo ratings yet
- Applied Mathematics II (E5)Document2 pagesApplied Mathematics II (E5)eliyasworku2No ratings yet
- Coc-Pen Math1 Algebra Practice Exam1Document4 pagesCoc-Pen Math1 Algebra Practice Exam1Marlon AmpoNo ratings yet
- M 111 RevDocument13 pagesM 111 RevDexter BordajeNo ratings yet
- Vieta's Formula AddendumDocument2 pagesVieta's Formula AddendumjohnlimethanNo ratings yet
- Quantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsFrom EverandQuantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsRating: 4.5 out of 5 stars4.5/5 (3)
- Limitless Mind: Learn, Lead, and Live Without BarriersFrom EverandLimitless Mind: Learn, Lead, and Live Without BarriersRating: 4 out of 5 stars4/5 (6)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4.5 out of 5 stars4.5/5 (543)
- The Journeyman Electrician Exam Study Guide: Proven Methods for Successfully Passing the Journeyman Electrician Exam with ConfidenceFrom EverandThe Journeyman Electrician Exam Study Guide: Proven Methods for Successfully Passing the Journeyman Electrician Exam with ConfidenceNo ratings yet
- The Fast Track to Your Extra Class Ham Radio License: Covers All FCC Amateur Extra Class Exam Questions July 1, 2020 Through June 30, 2024From EverandThe Fast Track to Your Extra Class Ham Radio License: Covers All FCC Amateur Extra Class Exam Questions July 1, 2020 Through June 30, 2024No ratings yet
- Mental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)From EverandMental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)No ratings yet
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4 out of 5 stars4/5 (331)
- Build a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.From EverandBuild a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.Rating: 5 out of 5 stars5/5 (1)
- Electrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tFrom EverandElectrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tRating: 4.5 out of 5 stars4.5/5 (27)
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeFrom EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeRating: 4.5 out of 5 stars4.5/5 (10)
- Guide to the IET Wiring Regulations: IET Wiring Regulations (BS 7671:2008 incorporating Amendment No 1:2011)From EverandGuide to the IET Wiring Regulations: IET Wiring Regulations (BS 7671:2008 incorporating Amendment No 1:2011)Rating: 4 out of 5 stars4/5 (2)
- Power System Control and ProtectionFrom EverandPower System Control and ProtectionB. Don RussellRating: 4 out of 5 stars4/5 (11)
- A Mind at Play: How Claude Shannon Invented the Information AgeFrom EverandA Mind at Play: How Claude Shannon Invented the Information AgeRating: 4 out of 5 stars4/5 (53)
- Practical Electrical Wiring: Residential, Farm, Commercial, and IndustrialFrom EverandPractical Electrical Wiring: Residential, Farm, Commercial, and IndustrialRating: 3.5 out of 5 stars3.5/5 (3)
- Basic Math & Pre-Algebra Workbook For Dummies with Online PracticeFrom EverandBasic Math & Pre-Algebra Workbook For Dummies with Online PracticeRating: 4 out of 5 stars4/5 (2)
- Hacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsFrom EverandHacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsRating: 3.5 out of 5 stars3.5/5 (2)