You might also like
- Ener ConDocument7 pagesEner ConArgel Linard Francisco MabagaNo ratings yet
- Voltage FluctuationsDocument8 pagesVoltage Fluctuationssandeep kumar mishraNo ratings yet
- Experiment V Current Control of An SCR I. ObjectiveDocument4 pagesExperiment V Current Control of An SCR I. ObjectiveDenisse Torizo Olan100% (1)
- Week6 Unsymmetricalfault 160318151132Document57 pagesWeek6 Unsymmetricalfault 160318151132Hardik MachNo ratings yet
- Center-Tapped Full-Wave RectifierDocument3 pagesCenter-Tapped Full-Wave RectifierPrimoNo ratings yet
- Section 7: Thyristors and SwitchesDocument18 pagesSection 7: Thyristors and Switcheschrist9088No ratings yet
- Protective Devices: Characteristics and Principles of Operation and ApplicationDocument5 pagesProtective Devices: Characteristics and Principles of Operation and Applicationnathanael tayorNo ratings yet
- Electrical Machine Design Design of Armature For DC Generator ContinuationDocument40 pagesElectrical Machine Design Design of Armature For DC Generator Continuationchristian diaz100% (1)
- Lab AssignmentDocument1 pageLab AssignmentbharathNo ratings yet
- Assignment 2 On Electromechanical InstrumentsDocument3 pagesAssignment 2 On Electromechanical InstrumentsSumit RaiNo ratings yet
- Michael Ernie F. Rodriguez: C N L NDocument4 pagesMichael Ernie F. Rodriguez: C N L Njin subaNo ratings yet
- EC8553 Electron Devices and Circuits Question BankDocument24 pagesEC8553 Electron Devices and Circuits Question BankRaja PirianNo ratings yet
- Zener Diode and Diode ApplicationDocument62 pagesZener Diode and Diode Applicationnibar dyllanNo ratings yet
- Network Laws & TheoremsDocument14 pagesNetwork Laws & Theoremstroy guillNo ratings yet
- Ee Laws Module IDocument28 pagesEe Laws Module ITsalachNo ratings yet
- BLOCKTRANSFERANDSEARCHDocument7 pagesBLOCKTRANSFERANDSEARCHNaomi Aira Gole CruzNo ratings yet
- EE MAC 2 Final Examination QuestionDocument33 pagesEE MAC 2 Final Examination QuestionKim OpenaNo ratings yet
- Experiment 9 14 PLC Quiz 3fDocument30 pagesExperiment 9 14 PLC Quiz 3fKevin Johnson PuraNo ratings yet
- DC Tutorial ProblemsDocument63 pagesDC Tutorial ProblemsKenneth Paul Dela CruzNo ratings yet
- Problems AC CircuitDocument8 pagesProblems AC Circuitसुमित नेमाNo ratings yet
- Semiconductor DiodeDocument6 pagesSemiconductor DiodeChlarisse Dianne SanchezNo ratings yet
- SW-Project-Proposal-Template-2016-rationale MarifeDocument2 pagesSW-Project-Proposal-Template-2016-rationale MarifeMarife dela CruzNo ratings yet
- Mdefbod Quiz 1Document1 pageMdefbod Quiz 1Heiro KeystrifeNo ratings yet
- Darkness Sensor CircuitDocument11 pagesDarkness Sensor CircuitBAKTHA SINGHNo ratings yet
- Medium TransmissionDocument15 pagesMedium TransmissionPerez Trisha Mae D.No ratings yet
- EPIRA (R.a 9136) - DOE - Department of Energy PortalDocument4 pagesEPIRA (R.a 9136) - DOE - Department of Energy PortalJc AlvarezNo ratings yet
- Chapter 7: DC Machinery Fundamentals: V 48 M 5 - 0 M 25 - 0 500 Rad/sDocument12 pagesChapter 7: DC Machinery Fundamentals: V 48 M 5 - 0 M 25 - 0 500 Rad/sGiordano Brito RodriguezNo ratings yet
- ECEN 20093 - Lesson 4 Unit 1-4 - Salamat, Andre Agassi DDocument1 pageECEN 20093 - Lesson 4 Unit 1-4 - Salamat, Andre Agassi DandreagassiNo ratings yet
- Correl 2 Compile Ip PDFDocument549 pagesCorrel 2 Compile Ip PDFpclr07No ratings yet
- Medium Transmission LinesDocument8 pagesMedium Transmission LinesJPR EEENo ratings yet
- Engg Management - Chapter - 10Document9 pagesEngg Management - Chapter - 10John Rexel CaroNo ratings yet
- Instrumentation (Finale)Document20 pagesInstrumentation (Finale)Jonathan BacusNo ratings yet
- Topic 1 - Electric CircuitsDocument70 pagesTopic 1 - Electric CircuitsKavinesh AnanthanNo ratings yet
- Cap 5Document29 pagesCap 5deberes ucacueNo ratings yet
- Assignment 1Document1 pageAssignment 1Vikash TiwariNo ratings yet
- Basic Principles of Signal Reproduction: Skirts Are The Sides of A Tuned Circuit Response Curve (See Figure 4.0)Document4 pagesBasic Principles of Signal Reproduction: Skirts Are The Sides of A Tuned Circuit Response Curve (See Figure 4.0)DARANo ratings yet
- Capacitors PDFDocument84 pagesCapacitors PDFNaseerUddin100% (1)
- VedantuDocument52 pagesVedantuMovie SensexNo ratings yet
- Ladder Logic ProblemsDocument4 pagesLadder Logic ProblemsEngr. Naveed Mazhar0% (1)
- Lab Report#1 - CSDocument6 pagesLab Report#1 - CSFahad Siddiq100% (1)
- Civil-V-Transportation Engineering-1 (10CV56) - SolutionDocument92 pagesCivil-V-Transportation Engineering-1 (10CV56) - SolutionLokesh KNo ratings yet
- IES - Objective Paper I & II Electrical - 1997 - 2008Document343 pagesIES - Objective Paper I & II Electrical - 1997 - 2008hasinimangaNo ratings yet
- Sound Pressure Meter (08-4c4)Document10 pagesSound Pressure Meter (08-4c4)Sri Krishna RakeshNo ratings yet
- Edited-Course Outline & Learning OutcomeDocument9 pagesEdited-Course Outline & Learning OutcomeMalik AnasNo ratings yet
- Experiment 4Document10 pagesExperiment 4djelbouNo ratings yet
- Final Exam Part 1 StudentDocument4 pagesFinal Exam Part 1 StudentRJ Balbedina100% (1)
- CH-2-DC MachineDocument83 pagesCH-2-DC MachineÙm ØrthøbøyNo ratings yet
- GSM Network Architecture: GSM (Global System For Mobile)Document5 pagesGSM Network Architecture: GSM (Global System For Mobile)mard gharibNo ratings yet
- The Equations of The Currents in Two Parallel Connected Electric Devices Are I1Document3 pagesThe Equations of The Currents in Two Parallel Connected Electric Devices Are I1Tim Picar100% (1)
- Fuse CutoutDocument2 pagesFuse CutoutDiana Akmaliah0% (1)
- Activity No 1 - Setting Up and Programming Controllers-1Document6 pagesActivity No 1 - Setting Up and Programming Controllers-1RUEL ALEJANDRONo ratings yet
- ES Lab ManualDocument117 pagesES Lab ManualSri JalakamNo ratings yet
- Project ReportDocument84 pagesProject ReportHitesh JkNo ratings yet
- Unit 46 Assignment Embedded SystemsDocument7 pagesUnit 46 Assignment Embedded SystemsHeba AzizNo ratings yet
- EEL4742-Lab-Manual-Embedded SystemsDocument101 pagesEEL4742-Lab-Manual-Embedded SystemsSusie KNo ratings yet
- Auto Intensity Control of Street LightDocument53 pagesAuto Intensity Control of Street LightNikhith ReddyNo ratings yet
- 2.projects Steps: 2.1. Define The TaskDocument4 pages2.projects Steps: 2.1. Define The TaskGirija VaniNo ratings yet
- Higher National Diploma in Engineering: Assessment BriefDocument4 pagesHigher National Diploma in Engineering: Assessment Briefvan hangNo ratings yet
- Competency-Based Learning Material: Sector: Qualification: Unit of Competency: Module TitleDocument59 pagesCompetency-Based Learning Material: Sector: Qualification: Unit of Competency: Module Titlerj libayNo ratings yet
- Iot Lab SyllabusDocument17 pagesIot Lab SyllabusSiva RamanNo ratings yet
- Throughput Call Quality - Opus: (Excellent) MsDocument1 pageThroughput Call Quality - Opus: (Excellent) MsALlan ABiangNo ratings yet
- Ch11.data Link Control PDFDocument32 pagesCh11.data Link Control PDFALlan ABiangNo ratings yet
- What Is PrepositionDocument1 pageWhat Is PrepositionALlan ABiangNo ratings yet
- Operations Management and TQM: New Era University College of Accountancy 2 SemesterDocument36 pagesOperations Management and TQM: New Era University College of Accountancy 2 SemesterALlan ABiangNo ratings yet
- Smart Solar Impulsive Water Quality Monitoring System Using Water Flow Sensor With DC MotorDocument5 pagesSmart Solar Impulsive Water Quality Monitoring System Using Water Flow Sensor With DC MotorALlan ABiangNo ratings yet
- Ch09.data Link LayerDocument22 pagesCh09.data Link LayerALlan ABiangNo ratings yet
- Technological Institute of The PhilippinesDocument1 pageTechnological Institute of The PhilippinesALlan ABiangNo ratings yet
- Design Project I - PDRDocument10 pagesDesign Project I - PDRALlan ABiangNo ratings yet
- Name: Course/ Section: Activity: Laboratory Experiment No. Instructor: Engr. Sheryl G. Velasquez Title: DateDocument1 pageName: Course/ Section: Activity: Laboratory Experiment No. Instructor: Engr. Sheryl G. Velasquez Title: DateALlan ABiangNo ratings yet
- Fil Mur Filter FM Alt P61e5Document23 pagesFil Mur Filter FM Alt P61e5ALlan ABiangNo ratings yet
- Physical Fitness and WellnessDocument7 pagesPhysical Fitness and WellnessALlan ABiangNo ratings yet
- Module 3 UTSDocument4 pagesModule 3 UTSALlan ABiangNo ratings yet
- Technological Institute of The Philippines: Nicanor ReyesDocument1 pageTechnological Institute of The Philippines: Nicanor ReyesALlan ABiangNo ratings yet
- Flyback CCMVSDCM Rev1p2 PDFDocument18 pagesFlyback CCMVSDCM Rev1p2 PDFALlan ABiangNo ratings yet
- Substitute To The Heroes of DevelopmentDocument1 pageSubstitute To The Heroes of DevelopmentALlan ABiangNo ratings yet
- Reflection Paper For Power 2Document1 pageReflection Paper For Power 2ALlan ABiangNo ratings yet
- Runge Kutta 2nd OrderDocument16 pagesRunge Kutta 2nd OrderALlan ABiangNo ratings yet
- Lab 3 EnerconDocument2 pagesLab 3 EnerconALlan ABiangNo ratings yet
- Numerical Methods Lab4Document2 pagesNumerical Methods Lab4ALlan ABiangNo ratings yet
- Conflict Is The Major Role of Central CharactersDocument2 pagesConflict Is The Major Role of Central CharactersALlan ABiangNo ratings yet
- Date Performed: - Rating: - Date SubmittedDocument39 pagesDate Performed: - Rating: - Date SubmittedALlan ABiangNo ratings yet
- Numerical Methods Lab2Document2 pagesNumerical Methods Lab2ALlan ABiangNo ratings yet
- Temporizadores KuhnkeDocument18 pagesTemporizadores KuhnkeRachit DhondNo ratings yet
- Esquema Elétrico Comando 3HAC024480-005 Rev08Document157 pagesEsquema Elétrico Comando 3HAC024480-005 Rev08pehhhhhNo ratings yet
- Core Java Concepts-2Document1 pageCore Java Concepts-2rizwanNo ratings yet
- Manual de Servicio HP Proliant ml350 g4Document42 pagesManual de Servicio HP Proliant ml350 g4bambamtdoyNo ratings yet
- Shenzhen Noridc - BLE Sensor AppDocument54 pagesShenzhen Noridc - BLE Sensor AppAlina AnaNo ratings yet
- Manual SDKDocument59 pagesManual SDKrrarcondoNo ratings yet
- Cics Abend CodesDocument825 pagesCics Abend Codesjoshna30No ratings yet
- Operating Huawei v3Document133 pagesOperating Huawei v3Adrian BravoNo ratings yet
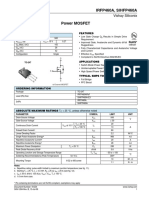
- Vishay IRFP460APBF Datasheet PDFDocument8 pagesVishay IRFP460APBF Datasheet PDFkamel keddarNo ratings yet
- Development of A Sound Recognition System Using STM32 Microcontrollers For Monitoring The State of Biological ObjectsDocument4 pagesDevelopment of A Sound Recognition System Using STM32 Microcontrollers For Monitoring The State of Biological ObjectsBrendon SoongNo ratings yet
- Flashing Firmware Image Files Using The Rockchip ToolDocument10 pagesFlashing Firmware Image Files Using The Rockchip ToolEl PapiNo ratings yet
- Microprocessor Manual NewDocument26 pagesMicroprocessor Manual NewVirendra KumarNo ratings yet
- Midterm AssignmentDocument7 pagesMidterm AssignmentEzekiel BrizuelaNo ratings yet
- Slide Set To Accompany Web Engineering A Practitioner ApproachDocument18 pagesSlide Set To Accompany Web Engineering A Practitioner ApproachRanjeetNo ratings yet
- 12 Memory 3Document15 pages12 Memory 3max scalomNo ratings yet
- Clover Health PatentDocument20 pagesClover Health PatentCharles GrossNo ratings yet
- D4 DL405 PLCDocument92 pagesD4 DL405 PLCsmail bendrissouNo ratings yet
- Reflection ApiDocument14 pagesReflection ApiAbrar FaiyazNo ratings yet
- Heart Beat Measurement and Detection Using PIC18 MicrocontrollerDocument5 pagesHeart Beat Measurement and Detection Using PIC18 MicrocontrollerRian MalikNo ratings yet
- Eyeball Based Cursor Movement ControlDocument5 pagesEyeball Based Cursor Movement ControlVijay VijjuNo ratings yet
- New Email 07 NewDocument16 pagesNew Email 07 NewJayvee CalinogNo ratings yet
- Smart Cameras As Embedded SystemsDocument14 pagesSmart Cameras As Embedded SystemspreethisettyNo ratings yet
- SLT Replication TechonologyDocument53 pagesSLT Replication TechonologyKoushik Pal100% (1)
- Exception Handling: Visual Programming LanguagesDocument47 pagesException Handling: Visual Programming Languageszaffar khanNo ratings yet
- AUTOSAR RS SystemTemplateDocument25 pagesAUTOSAR RS SystemTemplateAkinwumi Mayowa OtunbqNo ratings yet
- BMW DIS V57, SSS V32 & TIS V8 Installation ProcedureDocument1,772 pagesBMW DIS V57, SSS V32 & TIS V8 Installation Procedurejan SteenNo ratings yet
- NE8000 M V800R022SPH180 Patch Release NotesDocument27 pagesNE8000 M V800R022SPH180 Patch Release NotesKemioNo ratings yet
- Intro To Computing I 2Document33 pagesIntro To Computing I 2Havy TjNo ratings yet
- Advantages: Management, Data Independence, and Systems IntegrationDocument8 pagesAdvantages: Management, Data Independence, and Systems IntegrationPhilip GwadenyaNo ratings yet
- EletronicsDocument1 pageEletronicsAlexandre Sette100% (1)