You might also like
- Project Report DCSDocument51 pagesProject Report DCSEngr XamirNo ratings yet
- Transient Response of A Separately Excited DC Motor Under No-Load ConditionDocument6 pagesTransient Response of A Separately Excited DC Motor Under No-Load ConditionSaad0806No ratings yet
- Speed Control of Switched Reluctance Motor-LibreDocument9 pagesSpeed Control of Switched Reluctance Motor-LibreIndrajithSrNo ratings yet
- Arindam Seminar 11Document6 pagesArindam Seminar 11Arindam BhattacharjeeNo ratings yet
- Ahmad ProjDocument11 pagesAhmad ProjSaifNo ratings yet
- Untitled 1Document4 pagesUntitled 1Temesgen MekonenNo ratings yet
- Submitted To: Dr. Tushar Kanti Roy Associate Professor Dept. of ETE, RUET Submitted By: Name: Aminur Rahman Bahar Roll: 1704033 Year: 3 Year (ODD) Submission Date: 23-08-21Document4 pagesSubmitted To: Dr. Tushar Kanti Roy Associate Professor Dept. of ETE, RUET Submitted By: Name: Aminur Rahman Bahar Roll: 1704033 Year: 3 Year (ODD) Submission Date: 23-08-21mbchNo ratings yet
- A Unified Method For Modeling and Simulation of Three Phase Induction Motor DrivesDocument5 pagesA Unified Method For Modeling and Simulation of Three Phase Induction Motor Drivesdhirajbharat20No ratings yet
- MATLAB SIMULINK Based DQ Modeling and Dynamic Characteristics of Three Phase Self Excited PDFDocument5 pagesMATLAB SIMULINK Based DQ Modeling and Dynamic Characteristics of Three Phase Self Excited PDFBhushan MankarNo ratings yet
- EEEE6115 UBa22EP025 AC m3Document20 pagesEEEE6115 UBa22EP025 AC m3Wanki CharlesNo ratings yet
- Archive of SID: Performance Analysis of A Cost Effective 4-Switch 3-Phase Inverter Fed IM DriveDocument6 pagesArchive of SID: Performance Analysis of A Cost Effective 4-Switch 3-Phase Inverter Fed IM DrivePranav VyasNo ratings yet
- A New Simulation Model of BLDC Motor With Real Back EMF WaveformDocument4 pagesA New Simulation Model of BLDC Motor With Real Back EMF WaveformPhạm Văn TưởngNo ratings yet
- Experiment 3 DC Motor Modeling: 3.0 ObjectiveDocument6 pagesExperiment 3 DC Motor Modeling: 3.0 Objectivecomplex72No ratings yet
- MATLAB Speed Control DC MotorDocument4 pagesMATLAB Speed Control DC MotorEngineering and Scientific International JournalNo ratings yet
- DC Motor - Modeling, Control and SimulationDocument41 pagesDC Motor - Modeling, Control and SimulationSue Chamieh89% (9)
- Techteach - No Simview DC Motor IndexDocument3 pagesTechteach - No Simview DC Motor IndexDiabloNo ratings yet
- Modeling and Simulation of The DC Motor Using Matlab and LabviewDocument6 pagesModeling and Simulation of The DC Motor Using Matlab and LabviewnghiepmechanNo ratings yet
- BLDC: Motor FailureDocument5 pagesBLDC: Motor FailureInternational Association of Scientific Innovations and Research (IASIR)No ratings yet
- ProjectControl, DC. AnalysisDocument15 pagesProjectControl, DC. AnalysisFir Dauss100% (1)
- 907continuous & Discontinuous Conduction of DC MotorDocument21 pages907continuous & Discontinuous Conduction of DC MotorMary Morse0% (1)
- A New Approach Based On Sinusoidal PWM Inverter With PI Controller For Vector Control of Induction MotorDocument7 pagesA New Approach Based On Sinusoidal PWM Inverter With PI Controller For Vector Control of Induction MotortheijesNo ratings yet
- Labview Simulation of Induction Motors: Zhaoxian Zhou and James Matthew JohnsonDocument8 pagesLabview Simulation of Induction Motors: Zhaoxian Zhou and James Matthew JohnsonR Sathish Kumar KumarNo ratings yet
- ME2135 Lab ReportDocument6 pagesME2135 Lab ReportLakshmi BalasubramaniamNo ratings yet
- CS7Document8 pagesCS7zubairashrafNo ratings yet
- Veac Ja ReportDocument99 pagesVeac Ja ReportPraveen KumarNo ratings yet
- Lab Report: Engineering Analysis and Design (EEN 206)Document6 pagesLab Report: Engineering Analysis and Design (EEN 206)saksham mahajanNo ratings yet
- Determination of A Synchronous Generator Characteristics Via Finite Element AnalysisDocument6 pagesDetermination of A Synchronous Generator Characteristics Via Finite Element Analysisamin342No ratings yet
- ED Lab Manual Original - Exp 1 To Exp 5Document19 pagesED Lab Manual Original - Exp 1 To Exp 5Umang MewaraNo ratings yet
- Modelling of Power Transformer FaultsDocument7 pagesModelling of Power Transformer FaultselizabethloayzaNo ratings yet
- Mathematical Modeling and Speed Torque Analysis of Three Phase Squirrel Cage Induction Motor Using Matlab Simulink For Electrical Machines LaboratoryDocument10 pagesMathematical Modeling and Speed Torque Analysis of Three Phase Squirrel Cage Induction Motor Using Matlab Simulink For Electrical Machines LaboratoryjhonnydesaNo ratings yet
- InformeDocument6 pagesInformeRoberto FernandezNo ratings yet
- ELEC4160 Exam 2009 - CompleteDocument8 pagesELEC4160 Exam 2009 - Completesiang8No ratings yet
- Speed Control of DC Servo Motor Using PIDocument26 pagesSpeed Control of DC Servo Motor Using PIUjjawal DarvaikarNo ratings yet
- A New Analytical Method On The Field Calculation of IPMDocument9 pagesA New Analytical Method On The Field Calculation of IPMYusuf YaşaNo ratings yet
- SSRN Id2772630 Tjeuuhgyfguh7776445Document6 pagesSSRN Id2772630 Tjeuuhgyfguh7776445Mustapha AbdullahiNo ratings yet
- Modeling and Simulation of Reluctance Motor Using Digital ComputerDocument5 pagesModeling and Simulation of Reluctance Motor Using Digital ComputerroyourboatNo ratings yet
- Jia 2012Document6 pagesJia 2012Anonymous hDJIZwEuoNo ratings yet
- DC Motor Speed Control Methods Using MATLAB - Simulink and Their Integration Into Undergraduate Electric Machinery CoursesDocument9 pagesDC Motor Speed Control Methods Using MATLAB - Simulink and Their Integration Into Undergraduate Electric Machinery CoursesWen ZJNo ratings yet
- Block Diagram of Electromechanical SystemDocument20 pagesBlock Diagram of Electromechanical SystemSandeep ReddyNo ratings yet
- Simulation of IEEE First Benchmark Model For SSR StudiesDocument4 pagesSimulation of IEEE First Benchmark Model For SSR StudiesPabloNalogowskiNo ratings yet
- Modelling &simulation of A Three-Phase Electric Traction Induction Motor Using Matlab SimulinkDocument7 pagesModelling &simulation of A Three-Phase Electric Traction Induction Motor Using Matlab SimulinkkrcdewanewNo ratings yet
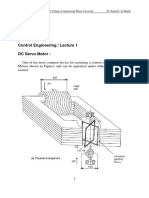
- Control Engineering / Lecture 1 DC Servo MotorDocument7 pagesControl Engineering / Lecture 1 DC Servo Motorjin kazamaNo ratings yet
- Simulation and Analysis Calculation of PMBLDCM Based On Time-Stepping Finite Element and Matlab MethodsDocument4 pagesSimulation and Analysis Calculation of PMBLDCM Based On Time-Stepping Finite Element and Matlab Methodsபொன்னியின் செல்வன்No ratings yet
- NEOM Final RevDocument15 pagesNEOM Final RevSanyam JainNo ratings yet
- Salimin2013 PDFDocument5 pagesSalimin2013 PDFAhmad RobbyNo ratings yet
- Induction Motor Design Using FEMMDocument13 pagesInduction Motor Design Using FEMMJunaid AhmadNo ratings yet
- EM Final Project ReportDocument6 pagesEM Final Project ReportShameen MazharNo ratings yet
- Phase Current Control of A Two Phase Synchronous Reluctance MachineDocument7 pagesPhase Current Control of A Two Phase Synchronous Reluctance MachineapacheNo ratings yet
- Circuit Daigrams and FormulasDocument12 pagesCircuit Daigrams and Formulasvish5936No ratings yet
- Analysis of Torque Ripple Due To Phase Commutation in Brushless DC MachinesDocument7 pagesAnalysis of Torque Ripple Due To Phase Commutation in Brushless DC MachinesBattula Santhosh KumarNo ratings yet
- EECT1REVDocument17 pagesEECT1REVSanyam JainNo ratings yet
- Icee2015 Paper Id3911Document4 pagesIcee2015 Paper Id3911Zellagui EnergyNo ratings yet
- Sliding Mode Observer For Torque Control in Sensorless BLDC MotorDocument5 pagesSliding Mode Observer For Torque Control in Sensorless BLDC MotorIOSRjournalNo ratings yet
- Submitted To: Dr. Tushar Kanti Roy Associate Professor Dept. of ETE, RUET Submitted By: Name: Aminur Rahman Bahar Roll: 1704033 Year: 3 Year (ODD) Submission Date: 23-08-21Document8 pagesSubmitted To: Dr. Tushar Kanti Roy Associate Professor Dept. of ETE, RUET Submitted By: Name: Aminur Rahman Bahar Roll: 1704033 Year: 3 Year (ODD) Submission Date: 23-08-21mbchNo ratings yet
- EE 392: Control Systems & Their Components: Lab 2: DC Motor Speed: Frequency Domain Methods For Controller DesignDocument4 pagesEE 392: Control Systems & Their Components: Lab 2: DC Motor Speed: Frequency Domain Methods For Controller DesignAbdalla FathyNo ratings yet
- D.C control matlab روكانDocument17 pagesD.C control matlab روكانMustafa AlhumayreNo ratings yet
- Comparison of Field Oriented Control and Direct Torque Control For Permanent Magnet Synchronous Motor PMSMDocument6 pagesComparison of Field Oriented Control and Direct Torque Control For Permanent Magnet Synchronous Motor PMSMjp_20_20No ratings yet
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo ratings yet
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlRating: 5 out of 5 stars5/5 (1)
- Electrical Machines: Lecture Notes for Electrical Machines CourseFrom EverandElectrical Machines: Lecture Notes for Electrical Machines CourseNo ratings yet
- Principles of Electrical Technology: Chapter 3 - Electric Fields and CapacitorDocument20 pagesPrinciples of Electrical Technology: Chapter 3 - Electric Fields and CapacitorKamelesh AnbalaganNo ratings yet
- Textural Zoning in Epithermal QZVN PDFDocument38 pagesTextural Zoning in Epithermal QZVN PDFBaso Rezki MaulanaNo ratings yet
- JEE & NEET Material (All Coaching) Links - HTML PDFDocument6 pagesJEE & NEET Material (All Coaching) Links - HTML PDFGaurav Mulodhia67% (6)
- JEE (ADV) 2015 SOLUTION Paper 1 PDFDocument28 pagesJEE (ADV) 2015 SOLUTION Paper 1 PDFAakash KapoorNo ratings yet
- GRE Physics Subject Test Cheat Sheet: by Winston Yin, 2015. Please Add Missing EquationsDocument4 pagesGRE Physics Subject Test Cheat Sheet: by Winston Yin, 2015. Please Add Missing EquationsjaredNo ratings yet
- Molecular Weight Distribution of LigninDocument26 pagesMolecular Weight Distribution of Ligninsamiw75No ratings yet
- Chemical Bonding and Molecular StructureDocument12 pagesChemical Bonding and Molecular StructureAthulRKrishnanNo ratings yet
- Orthogonal Curvilinear Coordinates: Department of Aerospace and Mechanical EngineeringDocument5 pagesOrthogonal Curvilinear Coordinates: Department of Aerospace and Mechanical EngineeringTushar GhoshNo ratings yet
- Doron Barnea 1993 Three Layer Model For Solid Liquid FlowDocument15 pagesDoron Barnea 1993 Three Layer Model For Solid Liquid FlowrestdeepakNo ratings yet
- Compressors, Chillers & CondensersDocument113 pagesCompressors, Chillers & CondensersmicerinosNo ratings yet
- Topic 5.1 - Electric Fields Formative Assessment NAMEDocument2 pagesTopic 5.1 - Electric Fields Formative Assessment NAMEfelaso9354No ratings yet
- Solved Exercise MassDocument3 pagesSolved Exercise MassMalak HindiNo ratings yet
- Key Concepts: 1. Definitions: AVDocument9 pagesKey Concepts: 1. Definitions: AVvirat gandhiNo ratings yet
- Motion of A Rigid BodyDocument14 pagesMotion of A Rigid Bodyzoya daccaniNo ratings yet
- Advances in Quantum TheoryDocument260 pagesAdvances in Quantum Theorymbox1286593100% (1)
- Random WalkDocument8 pagesRandom WalkMeral OcakNo ratings yet
- Airy FunctionDocument6 pagesAiry Functionmenonita89No ratings yet
- MW Polymers PPT b5Document59 pagesMW Polymers PPT b5Lailatul BadriyahNo ratings yet
- Atoms PYQDocument8 pagesAtoms PYQAyaanNo ratings yet
- Specification Amorphous SilicaDocument2 pagesSpecification Amorphous Silicadivyesh_pariharNo ratings yet
- Physics: Chapter - Dual Nature of Radiation and Matter Chapterwise Practise Problems (CPP) For NEETDocument12 pagesPhysics: Chapter - Dual Nature of Radiation and Matter Chapterwise Practise Problems (CPP) For NEETsoyel afridiNo ratings yet
- Foundation Engineering Refresher ModuleDocument5 pagesFoundation Engineering Refresher ModuleJunar AmaroNo ratings yet
- Aqa Chem4 QP Jun14Document24 pagesAqa Chem4 QP Jun14mystreet123No ratings yet
- (Brian Skyrms) Possible Worlds, Physics and MetaphDocument6 pages(Brian Skyrms) Possible Worlds, Physics and MetaphGuillermo XoxNo ratings yet
- Fan Heater - B-011 - Data SheetsDocument9 pagesFan Heater - B-011 - Data SheetsNadim Ahmad SiddiqueNo ratings yet
- Mechanical Operations Lab Report On Comparing The Efficiency of Cyclone Separator On Different Types of MaterialsDocument13 pagesMechanical Operations Lab Report On Comparing The Efficiency of Cyclone Separator On Different Types of Materialsnkar037No ratings yet
- SPM Fizik Tingkatan 4,5 - Paper2 - 20120724090124Document24 pagesSPM Fizik Tingkatan 4,5 - Paper2 - 20120724090124Noratiqah Binti Mohd AminNo ratings yet
- Section A (45, Marks) Answer All Questions in This Section.: Az y A X Az y A X Z y AxDocument8 pagesSection A (45, Marks) Answer All Questions in This Section.: Az y A X Az y A X Z y Axvoon sjNo ratings yet
- (21572) DPP 21 41 Vikaas (Ja) Module 2 BDocument151 pages(21572) DPP 21 41 Vikaas (Ja) Module 2 BAnissa FernandesNo ratings yet
- Larkoski A J Elementary Particle Physics An Intuitive IntrodDocument758 pagesLarkoski A J Elementary Particle Physics An Intuitive IntrodJuan Pablo Carvajal100% (6)