You might also like
- Good Book To Use It in MachineDocument57 pagesGood Book To Use It in MachineMohammed AlhakeemiNo ratings yet
- Dc Motor part (1) نظرى - revisionDocument13 pagesDc Motor part (1) نظرى - revisionMohammed AboalfotouhNo ratings yet
- Questions & Answers On Circuit Model, Emf and TorqueDocument19 pagesQuestions & Answers On Circuit Model, Emf and Torquekibrom atsbhaNo ratings yet
- Mathematical Modelling and Position Control of Brushless DC (BLDC) MotorDocument8 pagesMathematical Modelling and Position Control of Brushless DC (BLDC) MotorVictor FurmanNo ratings yet
- DC Machine II OCC CharacteristicsDocument3 pagesDC Machine II OCC CharacteristicsAum4Eng HelpNo ratings yet
- Modeling DC Motor Transient ResponseDocument7 pagesModeling DC Motor Transient ResponseOTOMASYON PLCNo ratings yet
- Chapter11 PDFDocument39 pagesChapter11 PDFSai KiranNo ratings yet
- ED Lab Manual Original - Exp 1 To Exp 5Document19 pagesED Lab Manual Original - Exp 1 To Exp 5Umang MewaraNo ratings yet
- Unit 6 Alternator (Synchronous Generator) : StructureDocument29 pagesUnit 6 Alternator (Synchronous Generator) : StructureMahir Asif Shadman100% (1)
- Ijireeice 123 PDFDocument6 pagesIjireeice 123 PDFUpama DasNo ratings yet
- Ahmad ProjDocument11 pagesAhmad ProjSaifNo ratings yet
- Ying 99Document6 pagesYing 99Vladimir GeorgievskiNo ratings yet
- Speed Control of DC Servo Motor Using PIDocument26 pagesSpeed Control of DC Servo Motor Using PIUjjawal DarvaikarNo ratings yet
- Speed Control of Separately Excited D.C. Motor: Chayan Kumar, Prof. (DR.) Deoraj Kumar TantiDocument11 pagesSpeed Control of Separately Excited D.C. Motor: Chayan Kumar, Prof. (DR.) Deoraj Kumar TantiWieNo ratings yet
- Transient Response of A Separately Excited DC Motor Under No-Load ConditionDocument6 pagesTransient Response of A Separately Excited DC Motor Under No-Load ConditionSaad0806No ratings yet
- A New Simulation Model of BLDC Motor With Real Back EMF WaveformDocument4 pagesA New Simulation Model of BLDC Motor With Real Back EMF WaveformPhạm Văn TưởngNo ratings yet
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesFrom EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo ratings yet
- Three Phase Self Excited Induction GenerDocument10 pagesThree Phase Self Excited Induction GenerBarathNo ratings yet
- 3.chapter Three-Starting System 1Document21 pages3.chapter Three-Starting System 1Ahmed M MerzaNo ratings yet
- Direct Torque ControlDocument5 pagesDirect Torque ControljanusanusNo ratings yet
- Practical Activity 2 DC Shunt Motor PLMDocument9 pagesPractical Activity 2 DC Shunt Motor PLMMarc Jairro GajudoNo ratings yet
- Eee 533 AssignmentDocument10 pagesEee 533 AssignmentFejiro AkpomuetataNo ratings yet
- c8 PDFDocument64 pagesc8 PDFAnjaana PrashantNo ratings yet
- Xiicleee RBP 1754revDocument6 pagesXiicleee RBP 1754revrbargallo0No ratings yet
- The Direct Current (DC) Motor - Principle of OperationDocument5 pagesThe Direct Current (DC) Motor - Principle of OperationEdison EstrellaNo ratings yet
- Anser Key EM - I 2019Document15 pagesAnser Key EM - I 2019Manoharan ManuNo ratings yet
- A New Approach Based On Sinusoidal PWM Inverter With PI Controller For Vector Control of Induction MotorDocument7 pagesA New Approach Based On Sinusoidal PWM Inverter With PI Controller For Vector Control of Induction MotortheijesNo ratings yet
- Unit I Synchronous Generator 9: Ee 8401 - Electrical Machines - IiDocument28 pagesUnit I Synchronous Generator 9: Ee 8401 - Electrical Machines - Ii8262 Vipul KumarNo ratings yet
- Viva Questions On AlternatorsDocument6 pagesViva Questions On AlternatorsKashif Hussain RazwiNo ratings yet
- EECT1REVDocument17 pagesEECT1REVSanyam JainNo ratings yet
- BEEE - Unit - II - QBDocument6 pagesBEEE - Unit - II - QBSweetlineSoniaNo ratings yet
- Chapter 5 Synchronous MachinesDocument27 pagesChapter 5 Synchronous MachinesIfit PrabowoNo ratings yet
- Electrical Machines - I Lab Manual GuideDocument61 pagesElectrical Machines - I Lab Manual GuideraniaNo ratings yet
- Experiment 04Document7 pagesExperiment 04Zeynal Abidin ŞabaşNo ratings yet
- Power Systems TheoryDocument13 pagesPower Systems TheoryGitta JoshuaNo ratings yet
- Experiment - 06 To Study Magnetisation Characteristics of DC Shunt Generator.Document9 pagesExperiment - 06 To Study Magnetisation Characteristics of DC Shunt Generator.charanrck10No ratings yet
- Transient AnalysisDocument16 pagesTransient Analysisdr_biltNo ratings yet
- Dynamic Model of A Permanent Magnet DC Motor: Projects For StudentsDocument8 pagesDynamic Model of A Permanent Magnet DC Motor: Projects For StudentsAlyssonAlmeidaNo ratings yet
- FIGURE 3.1 Switched Reluctance Motor Configurations. (A) One Tooth Per Pole. (B) Two Teeth Per Pole (12/10 Poles)Document32 pagesFIGURE 3.1 Switched Reluctance Motor Configurations. (A) One Tooth Per Pole. (B) Two Teeth Per Pole (12/10 Poles)starboyNo ratings yet
- Power and Torque in Synchronous Generators: App MDocument52 pagesPower and Torque in Synchronous Generators: App MHanan ShayiboNo ratings yet
- Automatic Voltage Control SystemsDocument47 pagesAutomatic Voltage Control Systemsbacuoc.nguyen356No ratings yet
- SSRN-id2772630-tjeuuhgyfguh7776445Document6 pagesSSRN-id2772630-tjeuuhgyfguh7776445Mustapha AbdullahiNo ratings yet
- Prof. Ch. SAI BABU: TopicDocument90 pagesProf. Ch. SAI BABU: TopicAbhimanyu Perumal100% (3)
- Question Bank: DEPARTMENT OF EEE/Electrical Machines-II/III YEARDocument22 pagesQuestion Bank: DEPARTMENT OF EEE/Electrical Machines-II/III YEARPartha Roy100% (1)
- ProjectControl, DC. AnalysisDocument15 pagesProjectControl, DC. AnalysisFir Dauss100% (1)
- Kosow PRB CodingDocument30 pagesKosow PRB CodingTasnim AhmadNo ratings yet
- Problems Chapter 5 1Document7 pagesProblems Chapter 5 1Siva KumarNo ratings yet
- DC Motors Lecture NotesDocument71 pagesDC Motors Lecture Notesm.investment.kNo ratings yet
- 02 DC Machines LabDocument8 pages02 DC Machines LabAndubekaNo ratings yet
- Modified Valley-Fill For Harmonics ReductionDocument4 pagesModified Valley-Fill For Harmonics ReductionAyong HiendroNo ratings yet
- EMF Equation of A DC Generator - Derivation For Motor & GeneratorDocument9 pagesEMF Equation of A DC Generator - Derivation For Motor & GeneratorelutfulNo ratings yet
- Synchronous Machine Parameter Measurement: Poles F NDocument9 pagesSynchronous Machine Parameter Measurement: Poles F NRitesh BhattNo ratings yet
- Simulation by Composite ModelDocument8 pagesSimulation by Composite Modelanshgarg786No ratings yet
- EE 6504 - ELECTRICAL MACHINES -II SYNCHRONOUS GENERATORDocument25 pagesEE 6504 - ELECTRICAL MACHINES -II SYNCHRONOUS GENERATORAriel Ombajen MentawanNo ratings yet
- Black Box" Model For DC-fed Trains Equipped With VSI Traction Drives and Three-Phase Induction MotorsDocument19 pagesBlack Box" Model For DC-fed Trains Equipped With VSI Traction Drives and Three-Phase Induction MotorsCPiresNo ratings yet
- Power System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)From EverandPower System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)No ratings yet
- Power Systems Modelling and Fault Analysis: Theory and PracticeFrom EverandPower Systems Modelling and Fault Analysis: Theory and PracticeRating: 2 out of 5 stars2/5 (1)
- Foundations of Electromagnetic Compatibility: with Practical ApplicationsFrom EverandFoundations of Electromagnetic Compatibility: with Practical ApplicationsNo ratings yet
- STATE SPACE MODELDocument5 pagesSTATE SPACE MODELjin kazamaNo ratings yet
- Adaptive Neuro-Fuzzy Inference System: Dr. Sadeq D. Al-MajidiDocument11 pagesAdaptive Neuro-Fuzzy Inference System: Dr. Sadeq D. Al-Majidijin kazamaNo ratings yet
- Fuzzy Logic Controller: ExampleDocument7 pagesFuzzy Logic Controller: Examplejin kazamaNo ratings yet
- PSO lecture on particle swarm optimizationDocument10 pagesPSO lecture on particle swarm optimizationjin kazamaNo ratings yet
- Fuzzy Logic Controller: ExampleDocument7 pagesFuzzy Logic Controller: Examplejin kazamaNo ratings yet
- Pole Placement: Dr. Sadeq Al-MajidiDocument19 pagesPole Placement: Dr. Sadeq Al-Majidijin kazamaNo ratings yet
- Digital control engineering lecture on z-transform and samplingDocument13 pagesDigital control engineering lecture on z-transform and samplingjin kazamaNo ratings yet
- Stability in Z Plane: ExampleDocument6 pagesStability in Z Plane: ExampleMustfa AhmedNo ratings yet
- PSO lecture on particle swarm optimizationDocument10 pagesPSO lecture on particle swarm optimizationjin kazamaNo ratings yet
- Root Locus Analysis in Z Plane: Dr. Sadeq Al-MajidiDocument10 pagesRoot Locus Analysis in Z Plane: Dr. Sadeq Al-Majidijin kazamaNo ratings yet
- Root Locus Analysis in Z Plane: ExampleDocument5 pagesRoot Locus Analysis in Z Plane: Examplejin kazamaNo ratings yet
- Stability in Z Plane: Dr. Sadeq Al-MajidiDocument11 pagesStability in Z Plane: Dr. Sadeq Al-Majidijin kazamaNo ratings yet
- PID Lecture OverviewDocument14 pagesPID Lecture Overviewjin kazama100% (1)
- Tuning of PID Controller: Dr. Sadeq Al-MajidiDocument11 pagesTuning of PID Controller: Dr. Sadeq Al-Majidijin kazamaNo ratings yet
- Digital Control Engineering: ExampleDocument7 pagesDigital Control Engineering: Examplejin kazamaNo ratings yet
- Pole Placement: Dr. Sadeq Al-MajidiDocument19 pagesPole Placement: Dr. Sadeq Al-Majidijin kazamaNo ratings yet
- Stability in Z Plane: ExampleDocument6 pagesStability in Z Plane: ExampleMustfa AhmedNo ratings yet
- Digital control engineering lecture on z-transform and samplingDocument13 pagesDigital control engineering lecture on z-transform and samplingjin kazamaNo ratings yet
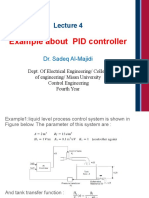
- Lecture 4 - PID Controller for Liquid Level Process ControlDocument6 pagesLecture 4 - PID Controller for Liquid Level Process Controljin kazamaNo ratings yet
- Stability in Z Plane: Dr. Sadeq Al-MajidiDocument11 pagesStability in Z Plane: Dr. Sadeq Al-Majidijin kazamaNo ratings yet
- Root Locus Analysis in Z Plane: Dr. Sadeq Al-MajidiDocument10 pagesRoot Locus Analysis in Z Plane: Dr. Sadeq Al-Majidijin kazamaNo ratings yet
- Tuning of PID Controller: Dr. Sadeq Al-MajidiDocument11 pagesTuning of PID Controller: Dr. Sadeq Al-Majidijin kazamaNo ratings yet
- Digital Control Engineering: ExampleDocument7 pagesDigital Control Engineering: Examplejin kazamaNo ratings yet
- Lecture 4 - PID Controller for Liquid Level Process ControlDocument6 pagesLecture 4 - PID Controller for Liquid Level Process Controljin kazamaNo ratings yet
- PID Lecture OverviewDocument14 pagesPID Lecture Overviewjin kazama100% (1)
- Root Locus Analysis in Z Plane: ExampleDocument5 pagesRoot Locus Analysis in Z Plane: Examplejin kazamaNo ratings yet
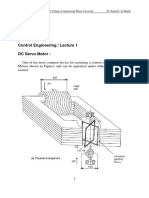
- DC Servo Motor Control ModesDocument7 pagesDC Servo Motor Control Modesjin kazamaNo ratings yet
- Literature StudyDocument7 pagesLiterature StudySilver ShadesNo ratings yet
- W 2HotlineContacts2019 - 0 2 PDFDocument3 pagesW 2HotlineContacts2019 - 0 2 PDFNathan Townsend Levy100% (1)
- Empowerment Is A Leadership TrickDocument10 pagesEmpowerment Is A Leadership TrickAura Carla TolentinoNo ratings yet
- BearingsDocument26 pagesBearingstmscorreiaNo ratings yet
- Specialty Fibers: Select SheetDocument4 pagesSpecialty Fibers: Select SheetсергейNo ratings yet
- Assessment Rubric Coach Manual Oct 11 - FinalDocument9 pagesAssessment Rubric Coach Manual Oct 11 - Finalapi-246218373No ratings yet
- Mccsemi: 8050 SS-C 8050 SS-DDocument2 pagesMccsemi: 8050 SS-C 8050 SS-DLeonardo IñiguezNo ratings yet
- MCMC Methods For Multi-Response Generalized LinearDocument22 pagesMCMC Methods For Multi-Response Generalized LinearkyotopinheiroNo ratings yet
- Mic520 525 530 eDocument86 pagesMic520 525 530 eMaia Naiara BarrientosNo ratings yet
- Dynamic Programming Algorithm Explained in ECE 551 LectureDocument11 pagesDynamic Programming Algorithm Explained in ECE 551 Lectureadambose1990No ratings yet
- Making Charts With Excel 2003: Income & ProfitDocument9 pagesMaking Charts With Excel 2003: Income & ProfitArunNo ratings yet
- Acros Organics Acta N°006Document20 pagesAcros Organics Acta N°006Atomer FormationNo ratings yet
- VKS INFRA DPR Submission for NHAI Bihar ProjectDocument1 pageVKS INFRA DPR Submission for NHAI Bihar ProjectamirNo ratings yet
- Statement of Financial Affairs: United States Bankruptcy Court Southern District of New YorkDocument42 pagesStatement of Financial Affairs: United States Bankruptcy Court Southern District of New YorkChapter 11 DocketsNo ratings yet
- BukuDocument39 pagesBukusimon sembiringNo ratings yet
- Methanol from Syngas Plant DesignDocument13 pagesMethanol from Syngas Plant DesignKhalidMadaniNo ratings yet
- 21st Century Literature Quarter 2 Week 7Document5 pages21st Century Literature Quarter 2 Week 7SHERRY MAE MINGONo ratings yet
- CH9-Diversification and AcquisitionsDocument9 pagesCH9-Diversification and AcquisitionsVincent LeruthNo ratings yet
- Ruud RAWL SplitDocument24 pagesRuud RAWL SplitElvis Ruben Piza MerchanNo ratings yet
- Sources of Subject of ArtDocument32 pagesSources of Subject of ArtAlaina De GuzmanNo ratings yet
- Dayton Audio Classic Series Subwoofers and Series II Woofer SpecificationsDocument1 pageDayton Audio Classic Series Subwoofers and Series II Woofer Specificationssales diyaudiocart.comNo ratings yet
- Afar ProblemsDocument17 pagesAfar ProblemsCrissa Mae Falsis100% (1)
- Types of Air Conditioning UnitsDocument10 pagesTypes of Air Conditioning Unitssnowgalvez44No ratings yet
- Abbott Piramal AgreementDocument88 pagesAbbott Piramal AgreementHemanth NandigalaNo ratings yet
- Centered Nursing Process Approach (9th Ed.) - St. Louis, MO: ElsevierDocument1 pageCentered Nursing Process Approach (9th Ed.) - St. Louis, MO: ElsevierfaizaNo ratings yet
- Unit 1Document32 pagesUnit 1Viyat RupaparaNo ratings yet
- Chap 7Document35 pagesChap 7Nizar TayemNo ratings yet
- (Historical Materialism Book Series 32) Lapavitsas, Costas - Financialisation in Crisis (2012, Brill Academic Pub)Document276 pages(Historical Materialism Book Series 32) Lapavitsas, Costas - Financialisation in Crisis (2012, Brill Academic Pub)monikaNo ratings yet
- Soft Course Material Iran 2007 PDFDocument646 pagesSoft Course Material Iran 2007 PDFLa Picarona del Peru100% (1)
- Complicaciones en La Tracción Ortodóntica Del Canino Superior Izquierdo. Retratamiento.Document7 pagesComplicaciones en La Tracción Ortodóntica Del Canino Superior Izquierdo. Retratamiento.Miltonfcc100% (1)