You might also like
- итоговое заданиеDocument2 pagesитоговое заданиеOlga Kukhtina100% (1)
- Problems in Continuum Mechanics For Engineers: Prof. Dr. E. Mazza Class Exercise 6 AS 2010Document3 pagesProblems in Continuum Mechanics For Engineers: Prof. Dr. E. Mazza Class Exercise 6 AS 2010Mahir MahmoodNo ratings yet
- Elastic Mechanics AssignmentsDocument8 pagesElastic Mechanics AssignmentsEng Bagaragaza Romuald100% (2)
- Material Models and Modes of Failure - MM4MMM Fracture: ConvenorDocument17 pagesMaterial Models and Modes of Failure - MM4MMM Fracture: ConvenorSam WilcockNo ratings yet
- Object-Oriented Nonlinear Finite Element Programming: A PrimerDocument17 pagesObject-Oriented Nonlinear Finite Element Programming: A PrimerBosslucianNo ratings yet
- MIT3 11F99 AiryDocument14 pagesMIT3 11F99 AiryADITYANo ratings yet
- Mechanics of Solids Week 8 LecturesDocument17 pagesMechanics of Solids Week 8 LecturesFlynn GouldNo ratings yet
- Static Equilibrium: M M M F F FDocument41 pagesStatic Equilibrium: M M M F F FINMENo ratings yet
- SeismicDocument21 pagesSeismicsoumyasssNo ratings yet
- Variation PlatesDocument8 pagesVariation Platesdebanik13498No ratings yet
- Torsion of Orthotropic Bars With L-Shaped or Cruciform Cross-SectionDocument15 pagesTorsion of Orthotropic Bars With L-Shaped or Cruciform Cross-SectionRaquel CarmonaNo ratings yet
- Laverne J Et AlDocument9 pagesLaverne J Et AlAldyansyah PutraNo ratings yet
- Chapter 7 Two-Dimensional FormulationDocument18 pagesChapter 7 Two-Dimensional FormulationHk Lorilla QuongNo ratings yet
- Linear Elastic Stress AnalysisDocument27 pagesLinear Elastic Stress AnalysisUr FriendNo ratings yet
- 007 Examples Constraints and Lagrange EquationsDocument12 pages007 Examples Constraints and Lagrange EquationsFrancisco Antonio Tello OrtizNo ratings yet
- Crack Propagation Analysis: Miguel Patr Icio Robert M.M. MattheijDocument28 pagesCrack Propagation Analysis: Miguel Patr Icio Robert M.M. MattheijOussama BouaraquiaNo ratings yet
- Contact ProblemsDocument6 pagesContact ProblemsSankar BabuNo ratings yet
- Little Bit Lame Equation PDFDocument20 pagesLittle Bit Lame Equation PDFAhmad FauzanNo ratings yet
- MIT2 003SCF11 Pset10solDocument21 pagesMIT2 003SCF11 Pset10solMailson1No ratings yet
- Assignment Stress Analysis MCQDocument6 pagesAssignment Stress Analysis MCQPanchi MungelwarNo ratings yet
- Nonlinear Fracture Mechanics: John W. HutchinsonDocument54 pagesNonlinear Fracture Mechanics: John W. HutchinsonRamón GarciaNo ratings yet
- Mechanics of Solids Week 6 LecturesDocument8 pagesMechanics of Solids Week 6 LecturesFlynn GouldNo ratings yet
- Elasticity AiryStressDocument19 pagesElasticity AiryStressAdari SagarNo ratings yet
- Lecture-19 & 20 (Non Circular Torsion Member (I-Section, Rectangular Section)Document38 pagesLecture-19 & 20 (Non Circular Torsion Member (I-Section, Rectangular Section)Anil MandariaNo ratings yet
- Quasi-Static Undrained Expansion of A Cylindrical Cavity in Clay in The Presence of Shaft Friction and Anisotropic Initial StressesDocument4 pagesQuasi-Static Undrained Expansion of A Cylindrical Cavity in Clay in The Presence of Shaft Friction and Anisotropic Initial StressesLTE002No ratings yet
- Calculation of Fracture Mechanic Parameters Via Fem For Some Cracked Plates Under Different LoadsDocument11 pagesCalculation of Fracture Mechanic Parameters Via Fem For Some Cracked Plates Under Different LoadschandruNo ratings yet
- CIE 1 Portions FEM - HKRV - BMSCE 21022020 PDFDocument70 pagesCIE 1 Portions FEM - HKRV - BMSCE 21022020 PDFYakajNo ratings yet
- ch5 EPFMDocument32 pagesch5 EPFMSelvaraji MuthuNo ratings yet
- Bulletin of The Seismological Society of America, Vol. 73, No. 3, Pp. 749-763, June 1963Document15 pagesBulletin of The Seismological Society of America, Vol. 73, No. 3, Pp. 749-763, June 1963Hernan Kennedy Ricaldi PorrasNo ratings yet
- Alternating Method Applied To Analyse Mode-III Fracture Problems With Multiple Cracks in An Infinite DomainDocument11 pagesAlternating Method Applied To Analyse Mode-III Fracture Problems With Multiple Cracks in An Infinite DomainNguyen Ba DungNo ratings yet
- MECH3310 Mechanics of Solids 2: The University of SydneyDocument8 pagesMECH3310 Mechanics of Solids 2: The University of SydneyJim LettermanNo ratings yet
- Crack-Tip Field: ES 247 Fracture Mechanics Zhigang SuoDocument12 pagesCrack-Tip Field: ES 247 Fracture Mechanics Zhigang SuoRamesh SantanaNo ratings yet
- Introduction To Fracture Mechanics Introduction To Fracture MechanicsDocument56 pagesIntroduction To Fracture Mechanics Introduction To Fracture MechanicsAKSHAY SHINDOLKARNo ratings yet
- S1110757X03202023Document28 pagesS1110757X03202023Ning TangNo ratings yet
- Module 1Document45 pagesModule 1MD SHAHRIARMAHMUDNo ratings yet
- X.0.hooke's LawDocument32 pagesX.0.hooke's LawSuresh SjNo ratings yet
- Problem Set 3Document4 pagesProblem Set 3ReemALMousawiNo ratings yet
- MIT2 003SCF11 Pset9 SolDocument10 pagesMIT2 003SCF11 Pset9 SolDasaka BrahmendraNo ratings yet
- On The Presence of T-Stress in Mode Ii Crack ProblemsDocument6 pagesOn The Presence of T-Stress in Mode Ii Crack ProblemsNaghijoonNo ratings yet
- 2D Cartesian ElasticityDocument13 pages2D Cartesian ElasticityMartin KoraNo ratings yet
- EMT by Jakson PDFDocument145 pagesEMT by Jakson PDFSafi Ullah KhanNo ratings yet
- Physics430 Lecture04Document22 pagesPhysics430 Lecture04Azwar SutionoNo ratings yet
- Chapter 6Document4 pagesChapter 6newrome76No ratings yet
- Small Disturbance Equation DerivationDocument9 pagesSmall Disturbance Equation DerivationJay ChandrasekaranNo ratings yet
- Mechanics of Solids Week 5 LecturesDocument10 pagesMechanics of Solids Week 5 LecturesFlynn GouldNo ratings yet
- Effect of The Boundary Conditions On In-Plane Dynamic Behavior of A Rectangular PlateDocument9 pagesEffect of The Boundary Conditions On In-Plane Dynamic Behavior of A Rectangular PlatebashmalNo ratings yet
- Chap 1 and 2Document7 pagesChap 1 and 2ismaeil1365No ratings yet
- IOSRJEN (WWW - Iosrjen.org) IOSR Journal of EngineeringDocument17 pagesIOSRJEN (WWW - Iosrjen.org) IOSR Journal of EngineeringIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNo ratings yet
- MECH3310 Mechanics of Solids 2: The University of SydneyDocument8 pagesMECH3310 Mechanics of Solids 2: The University of SydneyJim LettermanNo ratings yet
- 2te Bereicht EntwurfDocument15 pages2te Bereicht EntwurfmandbackNo ratings yet
- Airy StressFunctionDocument7 pagesAiry StressFunctionManoj RamNo ratings yet
- On The Shape Factor For The Maximum Pressure of The Undercut Groove FormDocument8 pagesOn The Shape Factor For The Maximum Pressure of The Undercut Groove FormVanesh KumarNo ratings yet
- Topic 2 - Airy Stress FunctionDocument20 pagesTopic 2 - Airy Stress FunctionJoshua Mamouney100% (2)
- Composite Materials Lection - 4Document13 pagesComposite Materials Lection - 4yigitciftci_No ratings yet
- Alejandra Kandus and Reuven Opher - Dependence of The MHD Shock Thickness On The Finite Electrical ConductivityDocument8 pagesAlejandra Kandus and Reuven Opher - Dependence of The MHD Shock Thickness On The Finite Electrical ConductivityJuaxmawNo ratings yet
- Mathematical Analysis 1: theory and solved exercisesFrom EverandMathematical Analysis 1: theory and solved exercisesRating: 5 out of 5 stars5/5 (1)
- Tables of Coefficients for the Analysis of Triple Angular Correlations of Gamma-Rays from Aligned NucleiFrom EverandTables of Coefficients for the Analysis of Triple Angular Correlations of Gamma-Rays from Aligned NucleiNo ratings yet
- Prospectus - Gumla 2021Document24 pagesProspectus - Gumla 2021Shiba Narayan SahuNo ratings yet
- 4th Scheme and Syllabus of Civil Engg. - 2019Document18 pages4th Scheme and Syllabus of Civil Engg. - 2019Shiba Narayan SahuNo ratings yet
- C ProgrammingDocument199 pagesC ProgrammingShiba Narayan SahuNo ratings yet
- Automobile EngineeringDocument29 pagesAutomobile EngineeringShiba Narayan SahuNo ratings yet
- Thesis Dewangan SDocument244 pagesThesis Dewangan SShiba Narayan SahuNo ratings yet
- Mine Surveying-Ii M204: Duration of Year Is Considered 28 WeeksDocument4 pagesMine Surveying-Ii M204: Duration of Year Is Considered 28 WeeksShiba Narayan SahuNo ratings yet
- Vacancies For Program Manager, Research Associates, Research Assistant, and Research InternsDocument7 pagesVacancies For Program Manager, Research Associates, Research Assistant, and Research InternsShiba Narayan SahuNo ratings yet
- Syllogism Concepts Part IDocument7 pagesSyllogism Concepts Part IShiba Narayan SahuNo ratings yet
- Mechanical BookDocument93 pagesMechanical BookShiba Narayan SahuNo ratings yet
- CIM, Data Capture and IdentificationDocument4 pagesCIM, Data Capture and IdentificationShiba Narayan SahuNo ratings yet
- Principles of Measurements,: Module I: Concepts of MetrologyDocument2 pagesPrinciples of Measurements,: Module I: Concepts of MetrologyShiba Narayan SahuNo ratings yet
- Schedule ICMPC 19 PDFDocument4 pagesSchedule ICMPC 19 PDFShiba Narayan SahuNo ratings yet
- Engineering ThermodynamicsDocument1 pageEngineering ThermodynamicsShiba Narayan SahuNo ratings yet
- Engineering ThermodynamicsDocument1 pageEngineering ThermodynamicsShiba Narayan SahuNo ratings yet
- Engineering ThermodynamicsDocument11 pagesEngineering ThermodynamicsShiba Narayan SahuNo ratings yet
- Engineering ThermodynamicsDocument4 pagesEngineering ThermodynamicsShiba Narayan SahuNo ratings yet
- And Therefore: For An Irreversible EngineDocument1 pageAnd Therefore: For An Irreversible EngineShiba Narayan SahuNo ratings yet
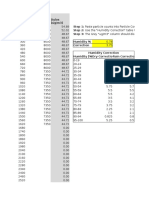
- Dylos Conversion Education - Cehs.health - Umt.eduDocument117 pagesDylos Conversion Education - Cehs.health - Umt.eduMCNo ratings yet
- EVANGELISM Church PlantingDocument9 pagesEVANGELISM Church PlantingLeon LwambaNo ratings yet
- Rhetorical Questions With "Nandao" - Chinese Grammar WikiDocument3 pagesRhetorical Questions With "Nandao" - Chinese Grammar WikiluffyNo ratings yet
- The Super Arpeggio PDFDocument3 pagesThe Super Arpeggio PDFMillacent La VitaNo ratings yet
- James Farr, David Lay Williams-The General Will - The Evolution of A Concept-Cambridge University Press (2015)Document538 pagesJames Farr, David Lay Williams-The General Will - The Evolution of A Concept-Cambridge University Press (2015)Juan NiemesNo ratings yet
- Formula B1 Unit 7 Test DFDocument6 pagesFormula B1 Unit 7 Test DFmarxuky21No ratings yet
- SustainabilityDocument856 pagesSustainabilityErnest AcarNo ratings yet
- Mauser 98K - Model 48 Rifle ManualDocument20 pagesMauser 98K - Model 48 Rifle ManualMeor Amri96% (28)
- Welding Procedure B69AWDocument2 pagesWelding Procedure B69AWMastram HatheshNo ratings yet
- CXS 192eDocument396 pagesCXS 192eSubs KatsNo ratings yet
- Power, Promise, Potential, and Posibilities of ParksDocument2 pagesPower, Promise, Potential, and Posibilities of ParksRizza Joy Sariego EsplanaNo ratings yet
- Ten Key Considerations For The Successful Implementation and Adoption of Large-Scale Health Information TechnologyDocument5 pagesTen Key Considerations For The Successful Implementation and Adoption of Large-Scale Health Information TechnologyYoona LimNo ratings yet
- Assignments MOSDocument4 pagesAssignments MOSRajeev RanaNo ratings yet
- Q2 - Melc 10 - 11Document56 pagesQ2 - Melc 10 - 11Geraldine MatiasNo ratings yet
- Unit - IDocument86 pagesUnit - IZeeshanMirzaNo ratings yet
- Lyrics BLOODY MARYDocument1 pageLyrics BLOODY MARYMuhd Baqir AzidzNo ratings yet
- S20191126coppercathodes Exdrc Lme 17 3Document3 pagesS20191126coppercathodes Exdrc Lme 17 3Engineer Anne MuthoniNo ratings yet
- PipeChart Trupply 2015 PDFDocument2 pagesPipeChart Trupply 2015 PDFDeepak PatilNo ratings yet
- Kereta SolarDocument26 pagesKereta SolarZam BisuNo ratings yet
- Chapter 2Document111 pagesChapter 2Phạm Ngọc Khánh An lớp 1.10No ratings yet
- Iex Dam Tam Web 2017Document65 pagesIex Dam Tam Web 2017Girish MehraNo ratings yet
- Elshafie Elzubier Elsiddig Ali: EducationDocument4 pagesElshafie Elzubier Elsiddig Ali: EducationShafie ZubierNo ratings yet
- Catalog Sydor 2022Document21 pagesCatalog Sydor 2022Chonk LeeNo ratings yet
- Intro. To EntrepreneurshipDocument20 pagesIntro. To EntrepreneurshipAnthonyNo ratings yet
- Paper Airplane PhysicsDocument16 pagesPaper Airplane Physicsapi-296709346No ratings yet
- Statistics in The Crem As of October 2020Document11 pagesStatistics in The Crem As of October 2020kamijou08No ratings yet
- Dr. Ram Manohar Lohiya National Law University: (First List Against Vacant Seats)Document2 pagesDr. Ram Manohar Lohiya National Law University: (First List Against Vacant Seats)TridhaNo ratings yet
- Ac SequenceDocument4 pagesAc SequencejenolivaNo ratings yet
- Mead's Theory of The SelfDocument1 pageMead's Theory of The Selfsumayya tariqNo ratings yet