You might also like
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- CV - Linus Antonio Ofori AGYEKUMDocument4 pagesCV - Linus Antonio Ofori AGYEKUMLinus AntonioNo ratings yet
- WeddingbudgetplanningDocument9 pagesWeddingbudgetplanningLinus AntonioNo ratings yet
- WeddingbudgetplanningDocument9 pagesWeddingbudgetplanningLinus AntonioNo ratings yet
- Check Out More Tools & Calculators: Wedding Budget and WorksheetDocument3 pagesCheck Out More Tools & Calculators: Wedding Budget and Worksheet'Yoel Tulus Prasetyo'No ratings yet
- Freshman Engineering Problem Solving With MATLABDocument83 pagesFreshman Engineering Problem Solving With MATLABjamey_mork1No ratings yet
- Meeting Sign in SheetDocument2 pagesMeeting Sign in SheetLinus AntonioNo ratings yet
- MULTISIM Instruction ManualDocument10 pagesMULTISIM Instruction ManualLinus AntonioNo ratings yet
- LinkedIn Generated Resume PDFDocument1 pageLinkedIn Generated Resume PDFLinus AntonioNo ratings yet
- Wedding Budget Template ForDocument12 pagesWedding Budget Template ForLinus AntonioNo ratings yet
- Revocation of Power of Attorney 1412702118033Document3 pagesRevocation of Power of Attorney 1412702118033Linus AntonioNo ratings yet
- COM 101 NOTES Telecommunication SystemDocument57 pagesCOM 101 NOTES Telecommunication SystemNazer Elham0% (1)
- Power of Attorney Court CaseDocument3 pagesPower of Attorney Court CaseLinus AntonioNo ratings yet
- Digital Electronics PDFDocument192 pagesDigital Electronics PDFLinus AntonioNo ratings yet
- Electronic Communications Systems-Wayne TomasiDocument918 pagesElectronic Communications Systems-Wayne TomasiLinus Antonio75% (4)
- 1238Document597 pages1238Talha Mushtaq ChoudhryNo ratings yet
- Syllabus Etc ThirdDocument56 pagesSyllabus Etc ThirdLinus AntonioNo ratings yet
- Electronic Power GeneratorDocument3 pagesElectronic Power GeneratorLinus AntonioNo ratings yet
- CS Lecture Notes Units 1 2 3Document88 pagesCS Lecture Notes Units 1 2 3sushinkNo ratings yet
- 3586 File Road To Client AssessmentDocument28 pages3586 File Road To Client AssessmentLinus AntonioNo ratings yet
- Smart Vehicular Traffic Density Analyzer - PowerPoint PDFDocument17 pagesSmart Vehicular Traffic Density Analyzer - PowerPoint PDFLinus AntonioNo ratings yet
- Quiz 1 Marking SchemeDocument4 pagesQuiz 1 Marking SchemeLinus AntonioNo ratings yet
- Electronic Power GeneratorDocument3 pagesElectronic Power GeneratorLinus AntonioNo ratings yet
- Teleremote ControlDocument3 pagesTeleremote ControlLinus AntonioNo ratings yet
- Digital Communication Lab ManualDocument21 pagesDigital Communication Lab ManualLinus Antonio50% (2)
- 1Document2 pages1Linus AntonioNo ratings yet
- Electronic Power GeneratorDocument3 pagesElectronic Power GeneratorLinus AntonioNo ratings yet
- General Configuration of Earth StationDocument6 pagesGeneral Configuration of Earth StationLinus AntonioNo ratings yet
- Btech 2008-2012 Curriculum For WebDocument174 pagesBtech 2008-2012 Curriculum For WebArun EceNo ratings yet
- Linear Integrated Lab ModuleDocument4 pagesLinear Integrated Lab ModuleLinus AntonioNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Catalogus 2010 ENGELSDocument52 pagesCatalogus 2010 ENGELShacikadiNo ratings yet
- Galactic Handbook and Synchronized MeditationsDocument91 pagesGalactic Handbook and Synchronized Meditationslapiton100% (10)
- FCV585 FCV620 Operator's Manual G 1-7-11Document57 pagesFCV585 FCV620 Operator's Manual G 1-7-11Katia QuispeNo ratings yet
- Burford-Exam 3 Spring 2018Document6 pagesBurford-Exam 3 Spring 2018api-430812455No ratings yet
- SPC英文版教材Document83 pagesSPC英文版教材bing cai100% (2)
- Owner S Manual Subaru LegacyDocument20 pagesOwner S Manual Subaru LegacyLexBgNo ratings yet
- Zenopus ClassicDocument32 pagesZenopus Classicserenity42No ratings yet
- NTPC Training ReportDocument83 pagesNTPC Training ReportAbhishek Mittal100% (2)
- Hellstorm NotesDocument57 pagesHellstorm NotesDeni ZenNo ratings yet
- Computer Engineering SyllabusDocument47 pagesComputer Engineering SyllabusLily ChanNo ratings yet
- Dsa 5300Document8 pagesDsa 5300Nguyen Van ToanNo ratings yet
- Construction Site PremisesDocument78 pagesConstruction Site PremisesDrew B Mrtnz67% (6)
- BAlochistanDocument14 pagesBAlochistanzee100% (1)
- Giddings & Lewis Sect08 HydDocument24 pagesGiddings & Lewis Sect08 HydAngel AdautaNo ratings yet
- Hydraulic Excavator RH 200 1,568 kW 30.5 m3Document8 pagesHydraulic Excavator RH 200 1,568 kW 30.5 m3mchan1965100% (1)
- MX 201110 enDocument1,203 pagesMX 201110 envajrahastaNo ratings yet
- Circuit Diagram:: Experiment No: 3 Title: Characteristics of Filament Lamp ObjectivesDocument2 pagesCircuit Diagram:: Experiment No: 3 Title: Characteristics of Filament Lamp ObjectivesAsrar Hussain BhatNo ratings yet
- Shat Karma ConciseDocument4 pagesShat Karma ConcisesarikaabhayNo ratings yet
- The Respiratory System - Freebie GuideDocument4 pagesThe Respiratory System - Freebie GuideIndustria Quimica0% (1)
- CaseStudy AmtrakDocument14 pagesCaseStudy Amtraksnob_kNo ratings yet
- New Patient Needing Continuous Renal Replacement Therapy (CRRT)Document9 pagesNew Patient Needing Continuous Renal Replacement Therapy (CRRT)sergey_1972No ratings yet
- The Future - G&VDocument6 pagesThe Future - G&VManuelHerreraMontoyaNo ratings yet
- MCS Selection For Throughput Improvement in Downlink LTE SystemsDocument5 pagesMCS Selection For Throughput Improvement in Downlink LTE SystemsNAZIFA NAWARNo ratings yet
- Essay - DnaDocument2 pagesEssay - Dnaapi-243852896No ratings yet
- Erasmus Rotterdam University MCDocument24 pagesErasmus Rotterdam University MCAndreea CroitoruNo ratings yet
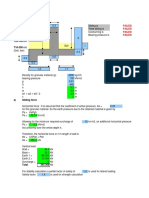
- Sliding, Overturning, Bearing Pressure and Bending Reinforcement Calculations for Retaining WallDocument4 pagesSliding, Overturning, Bearing Pressure and Bending Reinforcement Calculations for Retaining WallAbdul Aziz Julkarnain ZulkifliNo ratings yet
- Textiles and Clothing SustaninabilityDocument134 pagesTextiles and Clothing Sustaninabilitydike100% (1)
- Creme Brulee - Printer Friendly PDFDocument1 pageCreme Brulee - Printer Friendly PDFmtlpcguysNo ratings yet
- Queer Ecology Critique - Georgetown 2014Document104 pagesQueer Ecology Critique - Georgetown 2014Evan JackNo ratings yet
- Mañanita Songs Mañanita SongsDocument2 pagesMañanita Songs Mañanita SongsSanchez Bayan100% (1)