You might also like
- Sla7024m PDFDocument12 pagesSla7024m PDFEJASMANYNo ratings yet
- Sla7024 26 29mDocument12 pagesSla7024 26 29mbashtavNo ratings yet
- Discontinued Product: For Reference OnlyDocument15 pagesDiscontinued Product: For Reference Onlyfelres87No ratings yet
- M/V™ Series Servo Drive: Description Power RangeDocument12 pagesM/V™ Series Servo Drive: Description Power RangeElectromateNo ratings yet
- SA5888Document8 pagesSA5888albinicue1No ratings yet
- Description Power Range: Analog Servo DriveDocument8 pagesDescription Power Range: Analog Servo DriveElectromateNo ratings yet
- IC 3842 para FonteDocument8 pagesIC 3842 para FonteTomNedscNo ratings yet
- Description Power Range: Analog Servo DriveDocument8 pagesDescription Power Range: Analog Servo DriveElectromateNo ratings yet
- DRV 8811Document22 pagesDRV 8811nelson_loboNo ratings yet
- Description Power Range: Analog Servo DriveDocument8 pagesDescription Power Range: Analog Servo DriveElectromateNo ratings yet
- XR-215 PLLDocument32 pagesXR-215 PLLJ Jesús Villanueva GarcíaNo ratings yet
- KT60KM06Document2 pagesKT60KM06Luciano DiasNo ratings yet
- CA3140Document20 pagesCA3140Brzata PticaNo ratings yet
- Analog Servo Drive: Description Power RangeDocument9 pagesAnalog Servo Drive: Description Power RangeElectromateNo ratings yet
- Azbh 12 A 8Document8 pagesAzbh 12 A 8ElectromateNo ratings yet
- A3953 Datasheet PDFDocument12 pagesA3953 Datasheet PDFfelres87No ratings yet
- LM2596 LM2596 SIMPLE SWITCHER Power Converter 150 kHz3A Step-Down Voltage RegulatorDocument33 pagesLM2596 LM2596 SIMPLE SWITCHER Power Converter 150 kHz3A Step-Down Voltage RegulatorFremont Navarro GottliebNo ratings yet
- Description Power Range: Analog Servo DriveDocument7 pagesDescription Power Range: Analog Servo DriveElectromateNo ratings yet
- A3953 DatasheetDocument12 pagesA3953 DatasheetMohan RajNo ratings yet
- UC3845ANDocument15 pagesUC3845ANMiloud ChouguiNo ratings yet
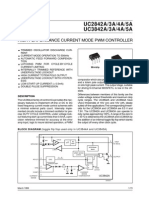
- UC2842A/3A/4A/5A UC3842A/3A/4A/5A: High Performance Current Mode PWM ControllerDocument16 pagesUC2842A/3A/4A/5A UC3842A/3A/4A/5A: High Performance Current Mode PWM ControllerCortés BernaNo ratings yet
- UC2842B/3B/4B/5B UC3842B/3B/4B/5B: High Performance Current Mode PWM ControllerDocument15 pagesUC2842B/3B/4B/5B UC3842B/3B/4B/5B: High Performance Current Mode PWM ControllertoajuiceNo ratings yet
- A 2918 SW Data SheetDocument8 pagesA 2918 SW Data SheetGustavo LunaNo ratings yet
- sg3525 ONDocument10 pagessg3525 ONbob75No ratings yet
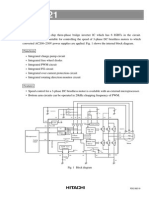
- ECN3021Document10 pagesECN3021Wasang Juwi PracihnoNo ratings yet
- UDN2916Document10 pagesUDN2916ejoaomelchiorsNo ratings yet
- SG3525A Pulse Width Modulator Control Circuit: 1% and The ErrorDocument10 pagesSG3525A Pulse Width Modulator Control Circuit: 1% and The ErrorJayesh SuryavanshiNo ratings yet
- Amc B25a20ac SpecsheetDocument9 pagesAmc B25a20ac SpecsheetElectromateNo ratings yet
- Ca3140, Ca3140A: 4.5Mhz, Bimos Operational Amplifier With Mosfet Input/Bipolar Output FeaturesDocument19 pagesCa3140, Ca3140A: 4.5Mhz, Bimos Operational Amplifier With Mosfet Input/Bipolar Output FeaturesRicardo Teixeira de AbreuNo ratings yet
- Chip Ca3098eDocument12 pagesChip Ca3098etopogigio240No ratings yet
- Datasheet Fairchild UC3843Document7 pagesDatasheet Fairchild UC3843Tina JohnsonNo ratings yet
- Description Power Range: Analog Servo DriveDocument7 pagesDescription Power Range: Analog Servo DriveElectromateNo ratings yet
- Analog Servo Drive: Description Power RangeDocument9 pagesAnalog Servo Drive: Description Power RangeElectromateNo ratings yet
- Analog Servo Drive: Description Power RangeDocument9 pagesAnalog Servo Drive: Description Power RangeElectromateNo ratings yet
- NE/SE5560 Switched-Mode Power Supply Control Circuit: Description Pin ConfigurationDocument16 pagesNE/SE5560 Switched-Mode Power Supply Control Circuit: Description Pin ConfigurationkokiskoNo ratings yet
- Advanced Motion Controls S100a20Document8 pagesAdvanced Motion Controls S100a20ElectromateNo ratings yet
- DS ptb78560cDocument27 pagesDS ptb78560cRajesh VenkateshNo ratings yet
- LMC555 CMOS Timer: General Description FeaturesDocument10 pagesLMC555 CMOS Timer: General Description FeaturesJeremy ObriotNo ratings yet
- Uc3842b 3843BDocument10 pagesUc3842b 3843Bbob75No ratings yet
- STRW6252Document15 pagesSTRW6252miltoncgNo ratings yet
- Features General Description: Advanced Dual PWM and Dual Linear Power ControllerDocument13 pagesFeatures General Description: Advanced Dual PWM and Dual Linear Power ControllerbehzadNo ratings yet
- UDx2916 DatasheetDocument10 pagesUDx2916 DatasheetBruno NascimentoNo ratings yet
- Description Power Range: Analog Servo DriveDocument7 pagesDescription Power Range: Analog Servo DriveElectromateNo ratings yet
- FAN7602 - Green Current Mode PWM Controller - Fairchild SemiconductorDocument17 pagesFAN7602 - Green Current Mode PWM Controller - Fairchild SemiconductorVijay MistryNo ratings yet
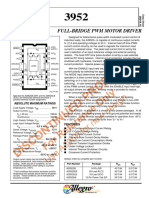
- Motor Driver - Full-Bridge PWM - A3953-N5Document14 pagesMotor Driver - Full-Bridge PWM - A3953-N5Ludwig Schmidt100% (1)
- Single Ended Active Clamp/Reset PWM: Features DescriptionDocument16 pagesSingle Ended Active Clamp/Reset PWM: Features Descriptioncatsoithahuong84No ratings yet
- E Tended Environment: Analog Servo DriveDocument8 pagesE Tended Environment: Analog Servo DriveElectromateNo ratings yet
- Description Power Range: Analog Servo DriveDocument8 pagesDescription Power Range: Analog Servo DriveElectromateNo ratings yet
- UC3843 DatasheetDocument13 pagesUC3843 DatasheetBigbrain99No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- 110 Waveform Generator Projects for the Home ConstructorFrom Everand110 Waveform Generator Projects for the Home ConstructorRating: 4 out of 5 stars4/5 (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Analog Circuit Design: A Tutorial Guide to Applications and SolutionsFrom EverandAnalog Circuit Design: A Tutorial Guide to Applications and SolutionsRating: 3.5 out of 5 stars3.5/5 (6)
- Semiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsFrom EverandSemiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsNo ratings yet
- Analog Circuit Design Volume Three: Design Note CollectionFrom EverandAnalog Circuit Design Volume Three: Design Note CollectionRating: 3 out of 5 stars3/5 (2)
- 3com 7750 User Guide ConfigDocument830 pages3com 7750 User Guide ConfigFranklin Miranda RoblesNo ratings yet
- 3com 7750 Config GuideDocument940 pages3com 7750 Config GuideFranklin Miranda RoblesNo ratings yet
- Laserjet 5200 Maintenance Kit Installation InstructionsDocument9 pagesLaserjet 5200 Maintenance Kit Installation InstructionsFranklin Miranda RoblesNo ratings yet
- Sla 4052Document36 pagesSla 4052Franklin Miranda RoblesNo ratings yet
- Dell-Cisco STP Interoperability and RecommendationsDocument7 pagesDell-Cisco STP Interoperability and RecommendationsFranklin Miranda RoblesNo ratings yet
- Sla 4037Document29 pagesSla 4037Franklin Miranda RoblesNo ratings yet
- Safend Data Protection Suite 3.4.5 Installation GuideDocument76 pagesSafend Data Protection Suite 3.4.5 Installation GuideFranklin Miranda RoblesNo ratings yet
- Sla 4037Document29 pagesSla 4037Franklin Miranda RoblesNo ratings yet
- Color Monitor: Service ManualDocument30 pagesColor Monitor: Service ManualFranklin Miranda RoblesNo ratings yet
- Avaya T7208 Quick Reference GuideDocument4 pagesAvaya T7208 Quick Reference GuideFranklin Miranda RoblesNo ratings yet
- AN15VS Samtron 56V - 56E Samsung 551V - SDocument60 pagesAN15VS Samtron 56V - 56E Samsung 551V - Sapi-26283766No ratings yet
- Unit 3Document15 pagesUnit 3kinhai_seeNo ratings yet
- Coal Conversions Facts 2013Document4 pagesCoal Conversions Facts 2013abdul2wajidNo ratings yet
- Chemicals Zetag DATA Powder Zetag 8110 - 0410Document2 pagesChemicals Zetag DATA Powder Zetag 8110 - 0410PromagEnviro.comNo ratings yet
- List of SAP MM Transaction CodesDocument5 pagesList of SAP MM Transaction CodesGoliBharggav0% (1)
- Ericsson MML Command Main RFDocument8 pagesEricsson MML Command Main RFpranayesquire100% (1)
- Ashworth-Memory, Efficiency, and Symbolic Analysis - Charles Babbage, John Herschel, and The Industrial MindDocument26 pagesAshworth-Memory, Efficiency, and Symbolic Analysis - Charles Babbage, John Herschel, and The Industrial MindlosoloresNo ratings yet
- Audit MCQsDocument3 pagesAudit MCQsShahab KhanNo ratings yet
- Raychem 33KV Termination Kit PDFDocument6 pagesRaychem 33KV Termination Kit PDFbala67% (3)
- Analisis Del Avión Airbus A380Document15 pagesAnalisis Del Avión Airbus A380VickCaballero100% (1)
- DT Basics Modified 27 MayDocument8 pagesDT Basics Modified 27 MayYounes BlxNo ratings yet
- Risk-Based Thinking: ISO/TC 176/SC 2/N1283Document11 pagesRisk-Based Thinking: ISO/TC 176/SC 2/N1283Selvaraj SimiyonNo ratings yet
- HSBC BANK Service Excellence and Market Competitiveness A Case of HSBC Bank IIPM Thesis 93pDocument86 pagesHSBC BANK Service Excellence and Market Competitiveness A Case of HSBC Bank IIPM Thesis 93pRaushan Kushwaha100% (1)
- Adams/View Command Manual 2012.1.2Document2,363 pagesAdams/View Command Manual 2012.1.2Guillermo Oliver0% (1)
- Icm SPMRDocument2 pagesIcm SPMRmahmoud4871No ratings yet
- TC450 Crown Block User ManualDocument11 pagesTC450 Crown Block User ManualHala Dawod100% (2)
- Siemens Acuson x300 PDFDocument32 pagesSiemens Acuson x300 PDFYohanemesNo ratings yet
- The Effect of E-Resource Use by Staff and Students For Teaching and Learning in Kampala International University, Western Campus.Document8 pagesThe Effect of E-Resource Use by Staff and Students For Teaching and Learning in Kampala International University, Western Campus.KIU PUBLICATION AND EXTENSIONNo ratings yet
- Seminar PPT E-JacketDocument23 pagesSeminar PPT E-JacketAnshimaNo ratings yet
- Step by Step Smart FormsDocument45 pagesStep by Step Smart FormscyberabadNo ratings yet
- Enraf Nonius Sonopuls 491 enDocument4 pagesEnraf Nonius Sonopuls 491 enDr Hanan AzfarNo ratings yet
- CCIP Cellular Buildings Oct08Document73 pagesCCIP Cellular Buildings Oct08Filipe FeioNo ratings yet
- Alcatel 1000 E10Document48 pagesAlcatel 1000 E10rawal_sanjay01375% (8)
- Practice Problems in ABSORPTION and HUMIDIFICATION - SolutionsDocument19 pagesPractice Problems in ABSORPTION and HUMIDIFICATION - SolutionsJenna Brasz100% (2)
- Revision History: TIDA-01614 Public Release TIDA-01614 E2 01614 NADocument8 pagesRevision History: TIDA-01614 Public Release TIDA-01614 E2 01614 NAasokanenNo ratings yet
- 06 - IEA 2013 - Resources To Reserves PDFDocument272 pages06 - IEA 2013 - Resources To Reserves PDFSanthy MorejónNo ratings yet
- Workstation Design6Document8 pagesWorkstation Design6pkj009No ratings yet
- ET ZC235 Manufacturing Processes: BITS PilaniDocument113 pagesET ZC235 Manufacturing Processes: BITS PilaniAasheesh Chander AgrawalNo ratings yet
- Castrol PresentationDocument38 pagesCastrol PresentationAdnan Shakir100% (2)
- Time Mark 263 3 Phase MonitorDocument2 pagesTime Mark 263 3 Phase MonitorDavid Marquez ErpelNo ratings yet
- Fencing and GateDocument16 pagesFencing and Gatemustika05No ratings yet